Holybro Pixhawk 6X-RT - (نسخه توسعه دهنده) کنترلر پرواز خودکار/سرویس کوتاه
Holybro Pixhawk 6X-RT - (نسخه توسعه دهنده) کنترلر پرواز خودکار/سرویس کوتاه
HolyBro
در دسترس بودن پیکاپ بارگیری نشد
نمای کلی
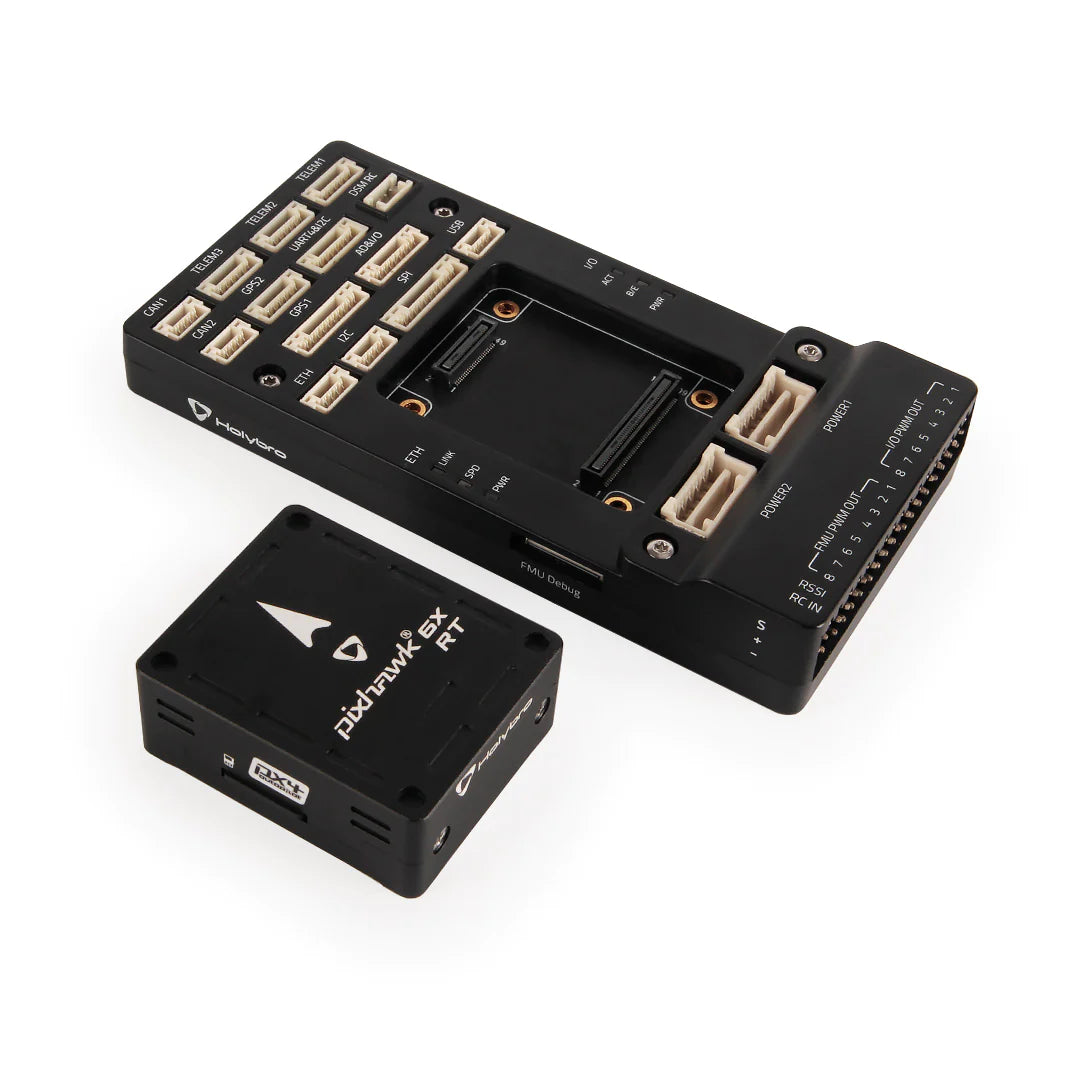
Pixhawk 6X-RT بر اساس استاندارد باز Pixhawk® FMUv6X-RT و استاندارد اتوبوس خودکار Pixhawk® است. با PX4 Autopilot® از پیش نصب شده عرضه می شود. در داخل فلایت کنترلر Pixhawk 6X-RT، می توانید یک i مبتنی بر NXP پیدا کنید.MXRT1176 MCU، همراه با فناوری حسگر Bosch® و InvenSense®، انعطافپذیری و قابلیت اطمینان را برای کنترل هر وسیله نقلیه خودران به شما میدهد.
I.میکروکنترلر MXRT1176 شامل یک Arm® Cortex-M7 در 1 گیگاهرتز و یک Cortex-M4 در 400 مگاهرتز است. دارای 2 مگابایت SRAM و 64 مگابایت Octal SPI Flash است. به لطف قدرت پردازش بهروز، توسعهدهندگان میتوانند با کار توسعه خود بهرهورتر و کارآمدتر باشند و الگوریتمها و مدلهای پیچیدهتری را ارائه دهند.
شامل IMUهای با کارایی بالا و کم نویز است که برای تثبیت بهتر طراحی شده اند و دارای سه IMU اضافی و فشارسنج های اضافی دوگانه در اتوبوس های جداگانه است. هنگامی که خلبان خودکار نقص سنسور را تشخیص می دهد، سیستم به طور یکپارچه به دیگری تغییر می کند تا قابلیت اطمینان کنترل پرواز حفظ شود. یک LDO مستقل هر مجموعه سنسور را با کنترل توان مستقل تغذیه می کند. سیستم ایزوله ارتعاش برای فیلتر کردن ارتعاشات با فرکانس بالا و کاهش نویز برای اطمینان از خوانش دقیق، به وسایل نقلیه اجازه می دهد تا عملکرد کلی پرواز بهتری داشته باشند. یک میکروچیپ اترنت یکپارچه PHY، ارتباط پرسرعت با رایانه های ماموریت از طریق اترنت اکنون امکان پذیر است.
Pixhawk 6X-RT برای توسعه دهندگان آزمایشگاه های تحقیقاتی شرکتی، استارت آپ ها، دانشگاهیان (تحقیق، اساتید، دانشجویان) و برنامه های تجاری عالی است. این کنترلر پرواز با هر پایه ای که از گذرگاه Pixhawk Autopilot استفاده می کند، سازگار است، مانند Pixhawk Baseboard، Pixhawk Mini Baseboard و Pixhawk RPi CM4 Baseboard.
نکات کلیدی طراحی
- دو هسته ای با کارایی بالا.پردازنده MXRT1176 با Cortex-M7 @ 1GHz – Cortex-M4 @ 400MHz
- کنترلر پرواز مدولار: سیستم IMU، FMU و Base جدا شده توسط یک کانکتور اتوبوس خودکار 100 پین و 50 پین Pixhawk® Autopilot متصل شده است.
- افزونگی: 3 برابر حسگر IMU و 2 برابر سنسور فشارسنج در اتوبوس های جداگانه
- حوزههای افزونگی سهگانه: دامنههای حسگر کاملاً ایزوله با اتوبوسهای مجزا و کنترل توان مجزا
- سیستم جداسازی لرزش برای فیلتر کردن لرزش فرکانس بالا و کاهش نویز برای اطمینان از خوانش دقیق
- رابط اترنت برای ادغام رایانه ماموریت با سرعت بالا
- IMU ها توسط مقاومت های گرمایشی آنبورد کنترل می شوند و به دمای کار بهینه IMU ها اجازه می دهند
- عنصر ایمن سخت افزاری NXP EdgeLock SE051 یک برنامه افزودنی برای خانواده کاملاً قابل اعتماد EdgeLock SE050 Plug & Trust امن خانواده، از به روز رسانی اپلت ها در میدان پشتیبانی می کند و ارائه می کند دارای گواهینامه امنیتی اثبات شده برای CC EAL 6+، با AVA_VAN.5 تا سطح سیستم عامل، برای محافظت قوی در برابر جدیدترین سناریوهای حمله. Eg برای ذخیره ایمن شناسه اپراتور
توجه:
- این نسخه توسعهدهنده برای پذیرندگان اولیه در حالی که به جمعآوری ساعات آزمایش پرواز ادامه میدهیم
- این Flight Controller در حال حاضر فقط در PX4 Flight Stack پشتیبانی میشود. (هدف سیستم عامل: FMUv6xrt). در Ardupilot پشتیبانی نمیشود.
- این کنترلر پرواز از ماژول برق دیجیتال استفاده میکند (همانند Pixhawk 6X، فهرست کامل را میتوانید اینجا پیدا کنید) نمودار مقایسه ماژول پاور
مشخصات
-
MCU: i.MXRT1176
-
Cortex-M7 @ 1GHz
-
Cortex-M4 @ 400MHz
-
2MB SRAM
-
64 مگابایت Octal SPI Flash
-
پردازنده IO: STM32F103
-
32 Bit Arm® Cortex®-M3، 72MHz، 64KB SRAM
-
سنسورهای روی برد
-
Accel/Gyro: BMI088
-
Accel/Gyro: ICM-42670-P
-
Accel/Gyro: ICM-42686-P
-
Mag: BMM150
-
فشارسنج: 2x BMP388
- عنصر امن سخت افزاری
- NXP EdgeLock SE051C2
- رابط SDHC
- 12 کانال PWM
- 8x UART
- 4x I2C
- 6x SPI
- 3x CAN-FD
- RMII 100M اترنت
- USB
- فعال کردن نرم افزار منبع باز
- PX4 Autopilot
- NuttX RTOS
- Zephyr RTOS
SKU20257 Standard Set/ SKU258 Mini Set شامل:
-
ماژول کنترل پرواز Pixhawk 6X-RT
-
پایه استاندارد Pixhawk/پایه مینی Pixhawk
- پاور ماژول PM02D HV
-
تنظیم کابل
لینک مرجع:
- دستورالعمل فلش کردن سیستم عامل (Github)
- PX4 در NXP IMXRT1176 1 گیگاهرتز MCU - اسلایدهای ارائه توسط NXP
- i.MX RT1176 – صفحه محصول MCU متقاطع 1 گیگاهرتزی با هسته های Arm® Cortex
- EdgeLock® SE051: راه حل امنیتی IoT با استفاده آسان و اثبات شده با پشتیبانی از قابلیت به روز رسانی و اپلت های سفارشی
Related Collections