دسته پایه Holybro Pixhawk Jetson با 6X / 6X Pro و NVIDIA Jetson
دسته پایه Holybro Pixhawk Jetson با 6X / 6X Pro و NVIDIA Jetson
HolyBro
در دسترس بودن پیکاپ بارگیری نشد
نمای کلی
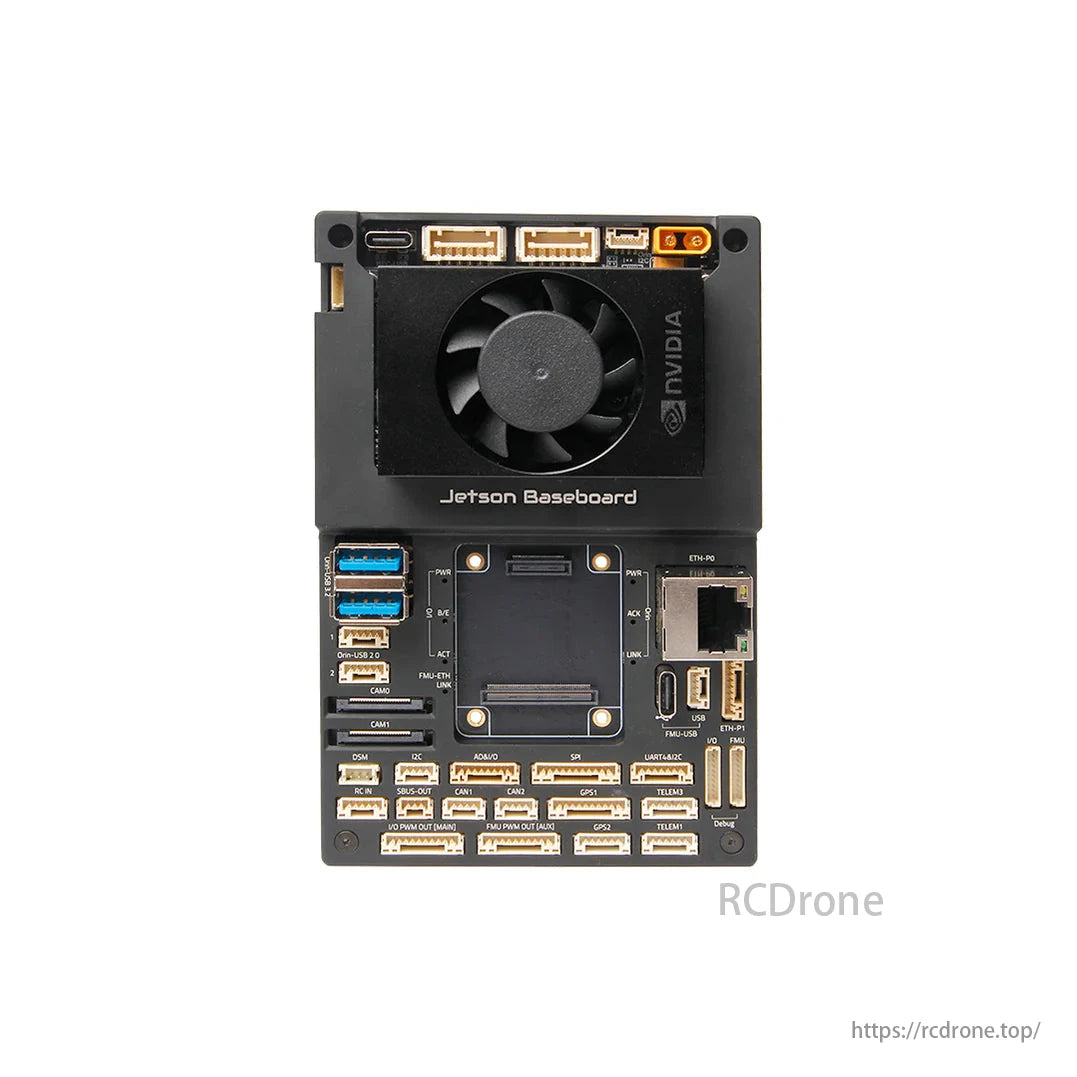
این پایه تخته پایه Holybro Pixhawk Jetson بر اساس طراحی شده است مشخصات منبع باز Pixhawk Autopilot Bus (PAB). و یکپارچه با NVIDIA Jetson Orin NX/Nano Carrier Board. این فاکتور فرم PAB امکان سازگاری با هر کنترلر پرواز PAB، از جمله Pixhawk 6X. این برد قدرت محاسباتی را ترکیب می کند NVIDIA Jetson با قابلیت کنترل پرواز از Pixhawk، آن را برای برنامه های پیشرفته مستقل ایده آل می کند.
ویژگی های کلیدی
-
سیستم یکپارچه: ترکیب می کند Pixhawk و NVIDIA Jetson در یک تخته
-
اتصال بدون درز: جتسون و پیکساوک از طریق سوئیچ UART، CAN و اترنت.
-
سازگاری گسترده: پشتیبانی می کند Jetson Orin NX و Orin Nano.
-
گسترش با سرعت بالا: ویژگی ها 2 عدد اسلات کلید M.2 برای WiFi/Bluetooth و NVMe SSD.
-
ادغام Pixhawk 6X: مجهز به سنسورهای ICM-45686 برای کنترل پرواز پیشرفته
پردازنده ها و حسگرها
پردازنده FMU:
-
STM32H753
-
ARM Cortex-M7 32 بیتی، 480 مگاهرتز
-
2 مگابایت حافظه فلش، 1 مگابایت رم
پردازنده IO:
-
STM32F103
-
ARM Cortex-M3 32 بیتی، 72 مگاهرتز
-
64 کیلوبایت SRAM
سنسورهای آنبرد (Rev8)
-
شتاب سنج/ژیروسکوپ: 3 برابر ICM-45686 (با فناوری BalancedGyro™)
-
فشارسنج: ICP20100 و BMP388
-
مغناطیس سنج: BMM150
درگاه های پایه و اتصال
اتصالات جتسون
-
2 عدد پورت اترنت گیگابیتی (از طریق به Jetson & Autopilot متصل می شود سوئیچ اترنت RTL8367S)
-
2 عدد ورودی دوربین MIPI CSI (هر کدام 4 خط، 22 پین Raspberry Pi Cam FFC)
-
2 عدد پورت میزبان USB 3.0 (محدودیت جریان USB-A، 5A)
-
2x USB 2.0 پورت هاست (5 پین JST-GH)
-
USB 2.0 برای اشکال زدایی (USB-C)
-
خروجی مینی HDMI
-
2 عدد اسلات M.2:
-
کلید M (2242) برای NVMe SSD (PCIEx4)
-
کلید E (2230) برای WiFi/BT (PCIEx2، UART، USB، I2S)
-
-
پورت CAN (متصل به خلبان خودکار CAN2، 4 پین JST-GH)
-
پورت های SPI، I2C، I2S، UART (کانکتورهای مختلف JST-GH)
-
پورت برق فن
-
ورودی برق: رابط XT30، 7-21 ولت (3S-4S)
-
UBEC 12A (3-14S) برای برنامه های > 4S توصیه می شود
اتصالات خلبان خودکار
-
رابط اتوبوس خودکار Pixhawk: 100 پین و 50 پین Hirose DF40
-
ورودی های ماژول برق دیجیتال اضافی
-
پشتیبانی از مانیتور پاور I2C
-
GPS و پورت های سوئیچ ایمنی: 10 پین و 6 پین JST-GH
-
2 پورت CAN (4 پین JST-GH)
-
3 پورت تله متری (JST-GH، یکی متصل به UART1 جتسون)
-
16 خروجی PWM (2x 10 پین JST-GH)
-
USB 2.0 (USB-C و 4 پین JST-GH)
-
ورودی DSM (3 پین JST-ZH، پیچ 1.5 میلیمتری)
-
ورودی RC (PPM/SBUS، 5 پین JST-GH)
-
درگاه SPI برای گذرگاه حسگر خارجی (SPI5، 11 پین JST-GH)
-
2 پورت اشکال زدایی (FMU و IO، 10 پین JST-SH)
برق مورد نیاز
-
ولتاژ ورودی: 7-21 ولت (3S-4S) از طریق رابط XT30
-
حداقل برق مورد نیاز: 8V/3A (بر اساس تجهیزات جانبی متفاوت است)
-
پشتیبانی از UBEC 12A خارجی (3-14S) برای کاربردهای افزونگی و ولتاژ بالاتر
-
محافظ داخلی در برابر ولتاژ
ابعاد و وزن
-
اندازه تابلو: 126 × 80 × 38 میلی متر (بدون کنترلر جتسون و پرواز)
-
وزن: 203.2 گرم (شامل جتسون، هیت سینک، کنترلر پرواز، SSD، ماژول Wi-Fi)
مشخصات UBEC-12A
-
ولتاژ ورودی: 3~14S (XT30)
-
ولتاژ خروجی: 6.0V/7.2V/8.0V/9.2V (7.2 ولت برای Jetson توصیه می شود)
-
جریان خروجی پیوسته: 12A
-
جریان خروجی انفجاری: 24A
-
اندازه: 48 × 33.6 × 16.3 میلی متر
-
وزن: 47.8 گرم
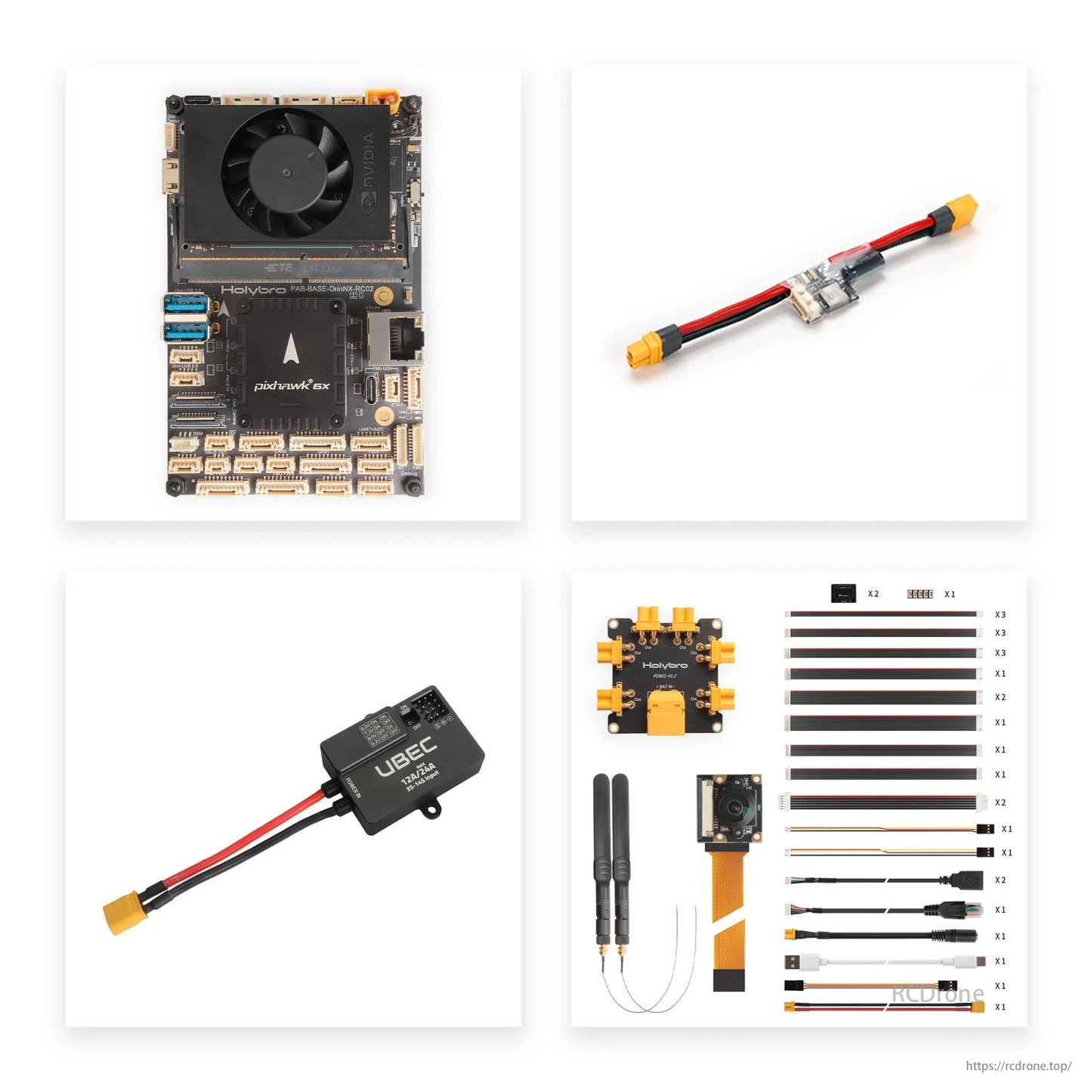
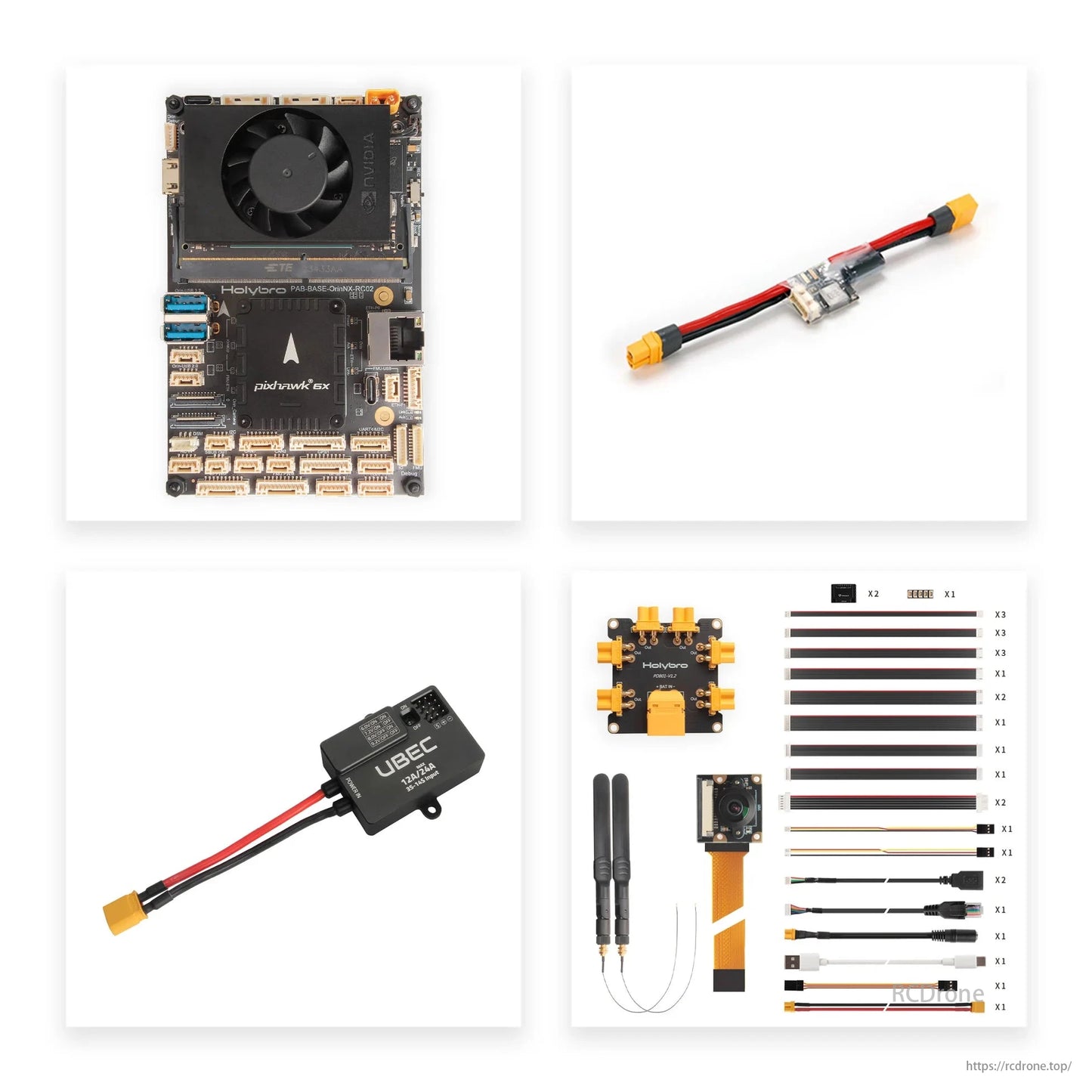
محتویات بسته
باندل Pixhawk 6X
-
ماژول کنترل پرواز Pixhawk 6X (ICM-45686).
-
تخته پایه Pixhawk Jetson Orin
-
Nvidia Orin NX (رم 16 گیگابایت) / اورین نانو (رم 4 گیگابایت) با هیت سینک و فن
-
SSD: سامسونگ PM9B1 PCIe 4.0 NVMe 512 گیگابایت
-
ماژول وای فای و بلوتوث: اینتل 8265 NGW AC دو باند / Realtek RTL8B22CE
-
دوربین: IMX219-200
-
ماژول برق PM02D
-
UBEC 12A (3-14S)
-
مجموعه برد و کابل PDB
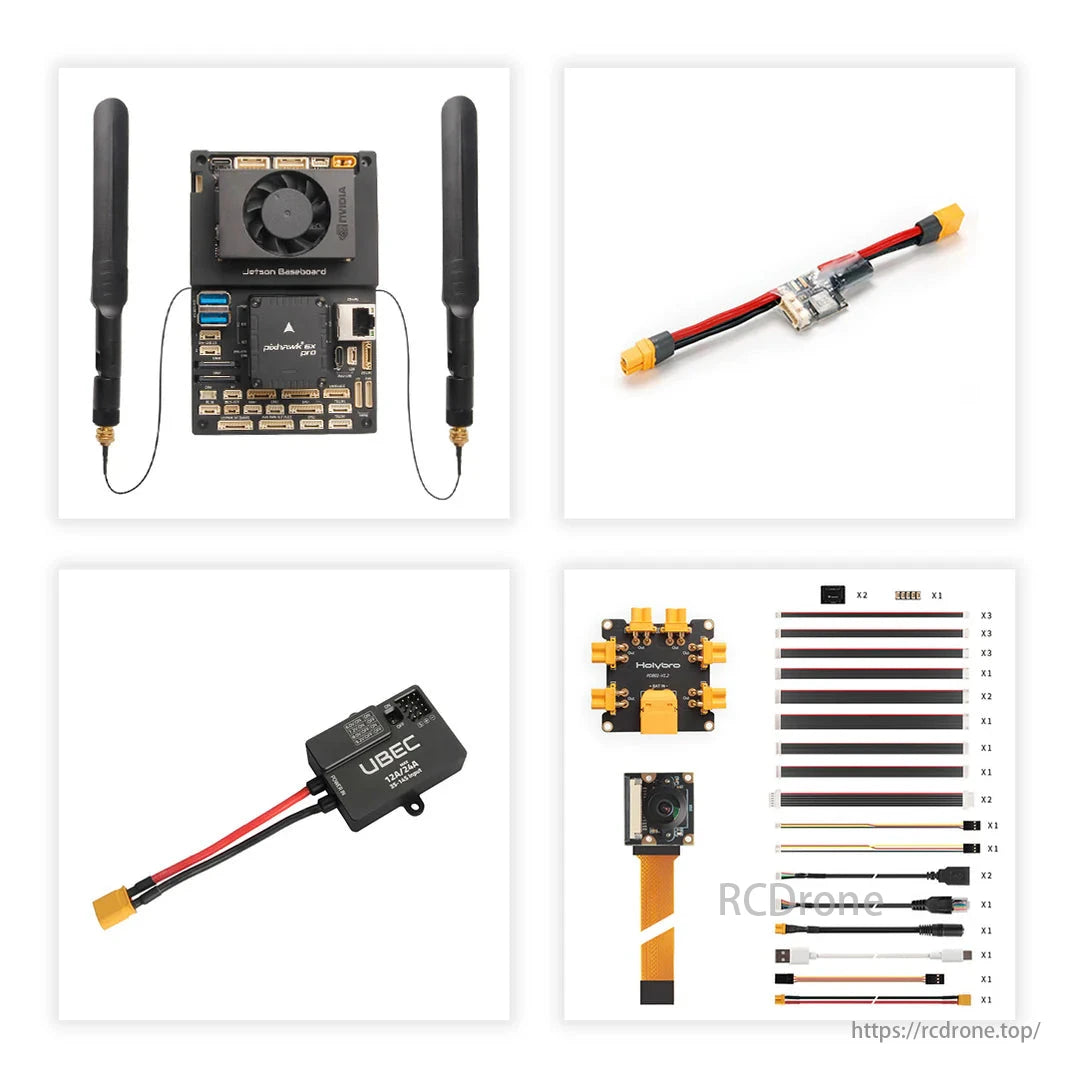
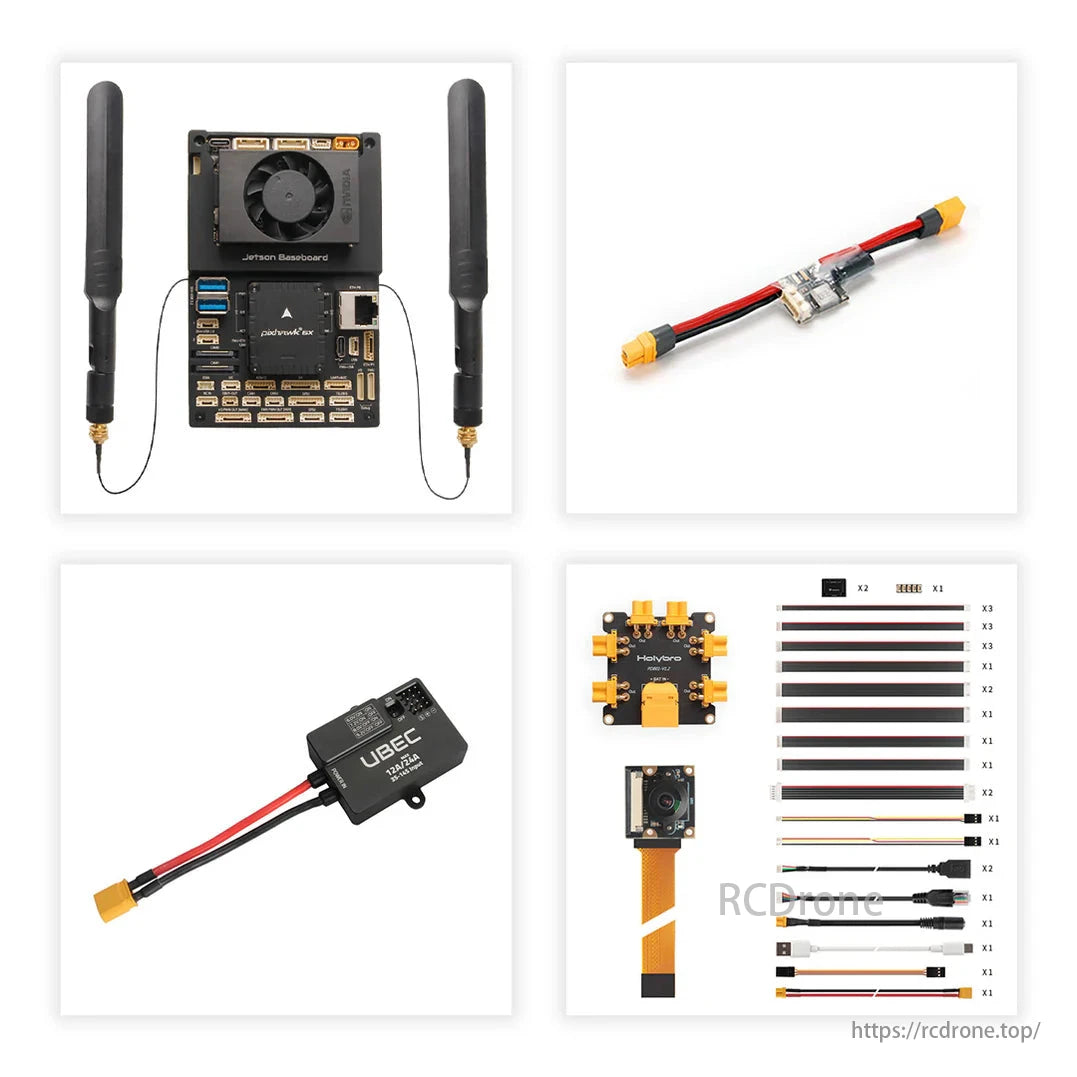
باندل Pixhawk 6X Pro
-
ماژول کنترل پرواز Pixhawk 6X Pro
-
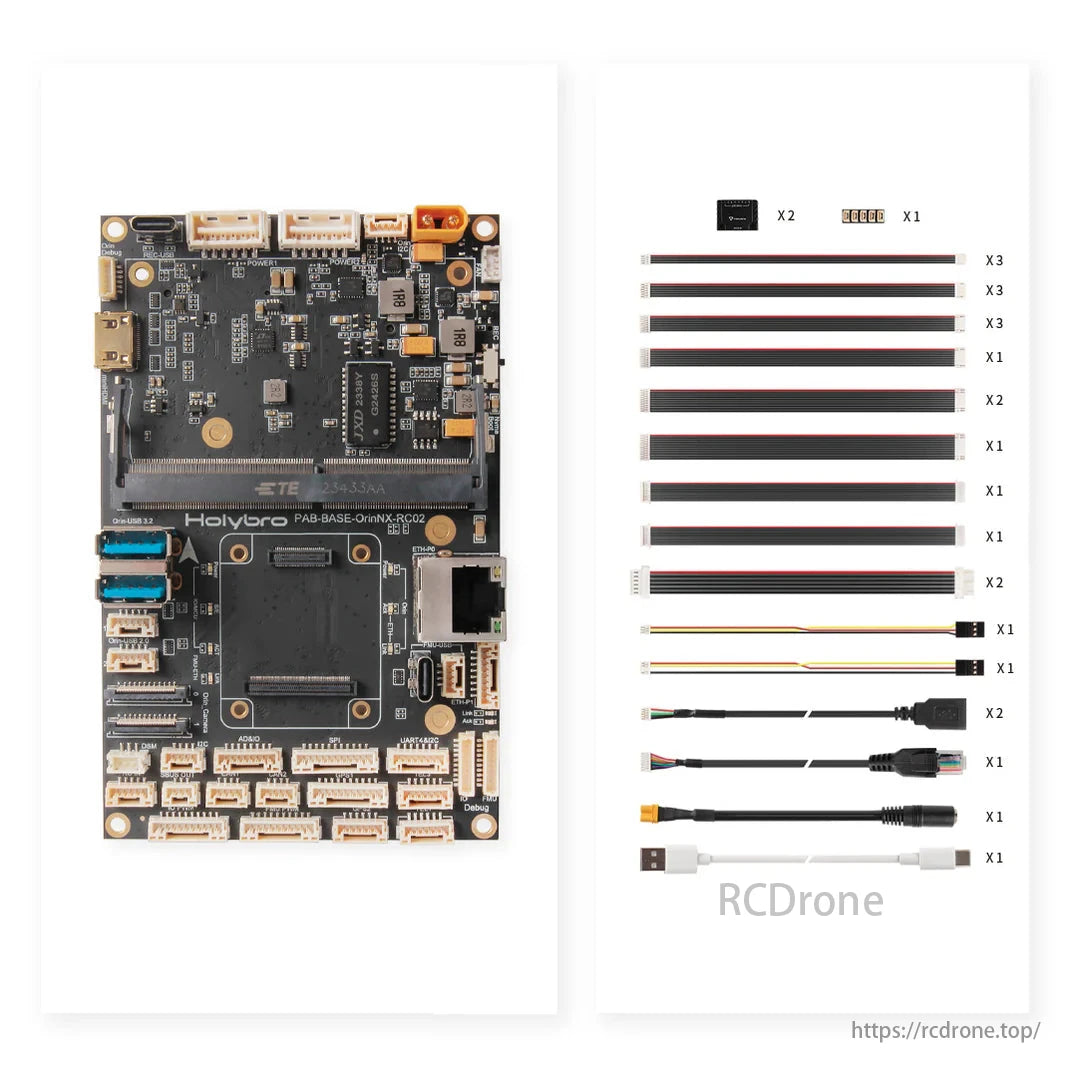
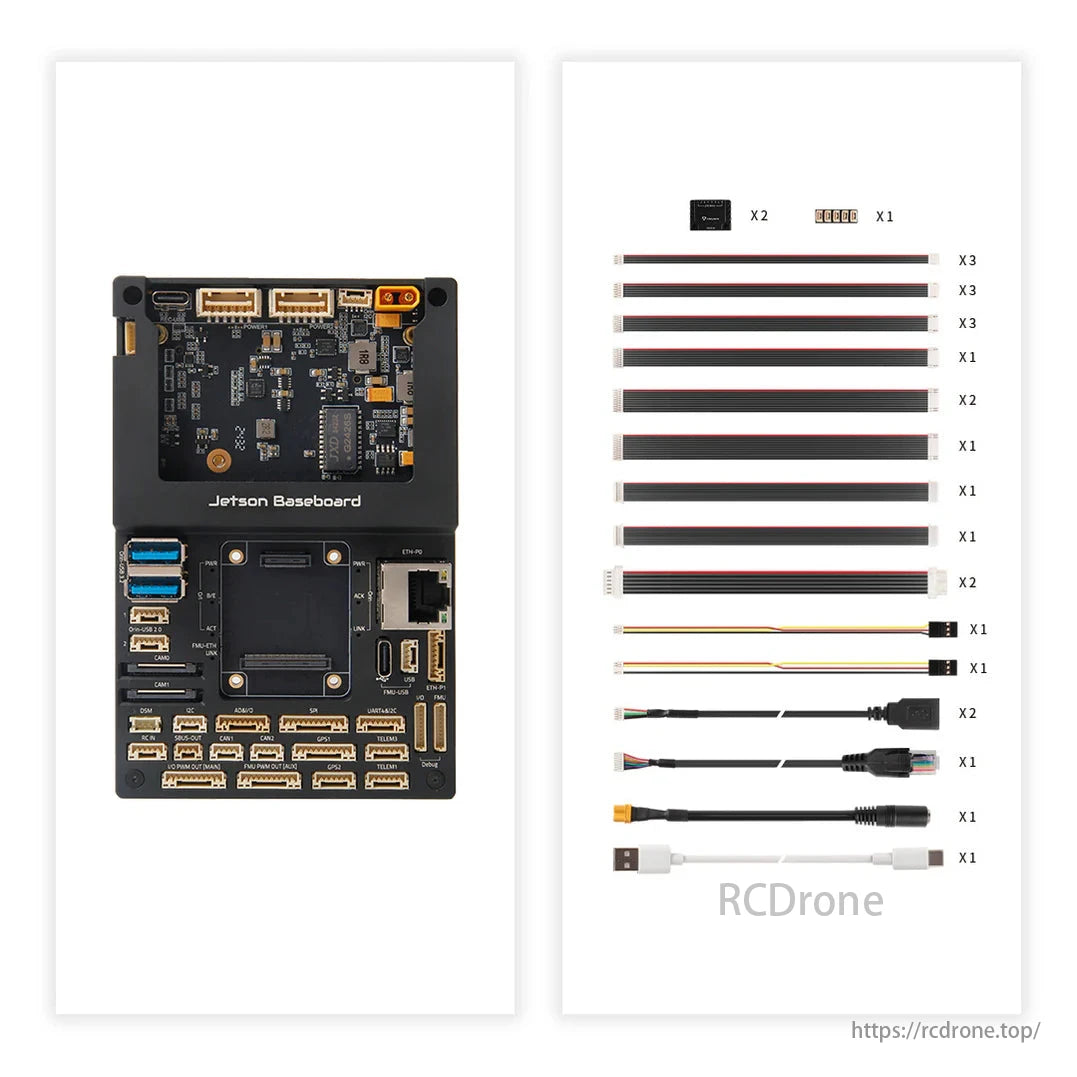
تخته پایه Pixhawk Jetson Orin (بدون قاب)
-
Nvidia Orin NX (رم 16 گیگابایت) / اورین نانو (رم 4 گیگابایت) با هیت سینک و فن
-
SSD، ماژول Wi-Fi/Bluetooth، دوربین، ماژول برق PM02D، UBEC 12A، برد PDB، مجموعه کابل
فقط پایه جتسون
-
تخته پایه Pixhawk Jetson Orin (بدون قاب)
-
مجموعه کابل
لینک های مرجع
اعتبارنامه ورود پیش فرض برای Jetson Orin:
-
شناسه:
holybro -
رمز عبور:
123
جزئیات




Pixhawk و Nvidia Jetson در یک برد ترکیب شدند.

اتصال Nvidia jetson از طریق uart can و سوئیچ اترنت با استفاده از کانکتور rj45 برای سیستم های خلبان خودکار
مشخصات منبع باز اتوبوس خودکار Pixhawk (PAB).

سیستم اتصال Jetson SoDIMM کاملاً سازگار: Jetson Orin NX/Nano

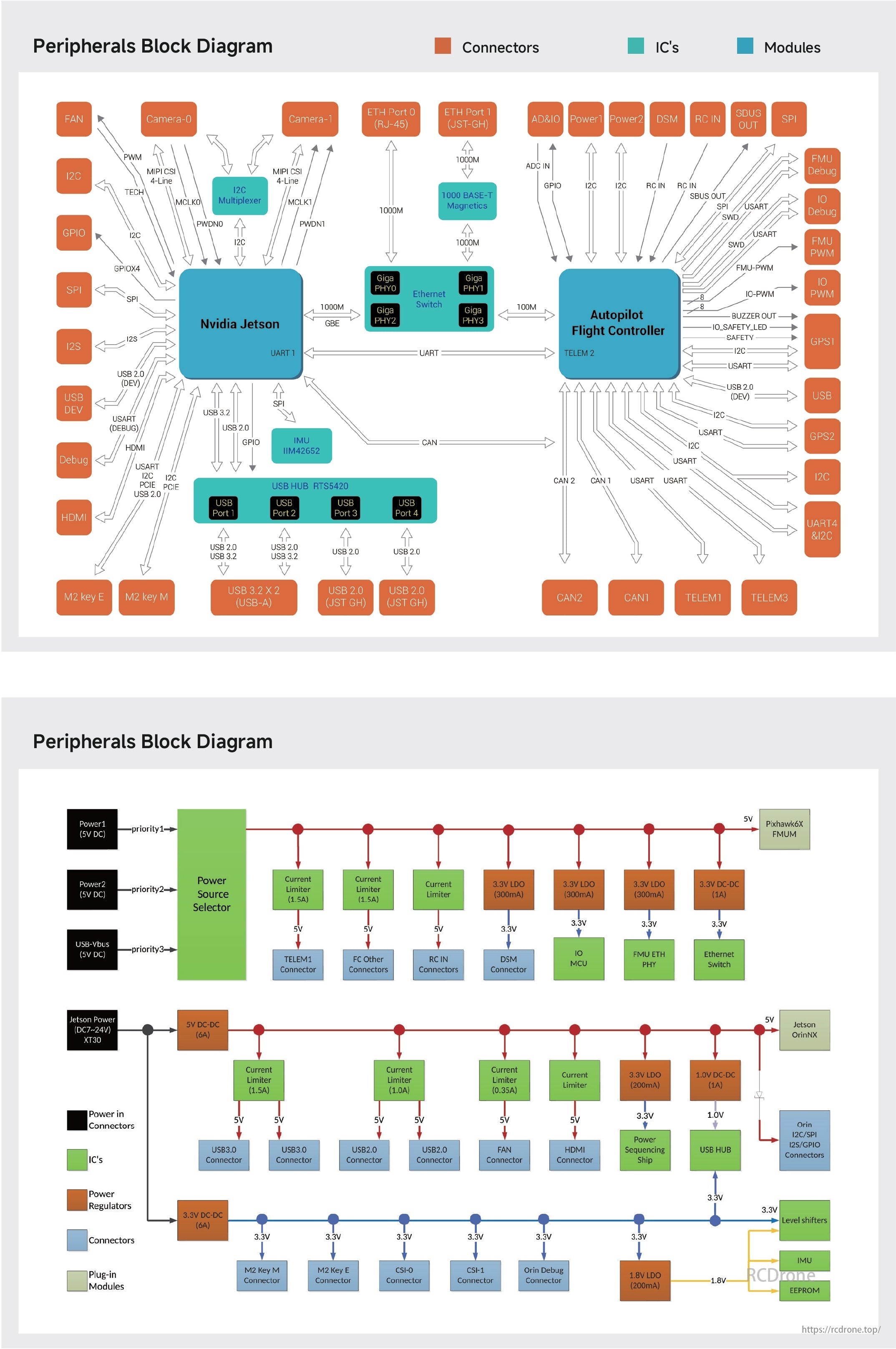
این تصویر یک بلوک دیاگرام لوازم جانبی را برای یک سیستم تعبیه شده نشان می دهد که شامل اجزایی مانند Nvidia Jetson و Autopilot Flight Controller است. این شامل کانکتورها، آیسیها و ماژولهای مختلف مانند پورتهای USB، سوئیچهای اترنت و تنظیمکنندههای برق است که اتصالات و جریان دادههای آنها را نشان میدهد.
نمودار سیم کشی مرجع

دو نمودار سیستم های توزیع نیرو را برای یک ماژول Jetson با استفاده از یک باتری نشان می دهد. نمودار سمت چپ از یک ماژول برق PM02D و یک برد توزیع برق استفاده می کند، در حالی که نمودار سمت راست شامل یک UBEC خارجی برای باتری های بزرگتر از 4S است.هر دو راهاندازی تنظیم ولتاژ مناسب برای جتسون و پیکساوک پاور را تضمین میکنند.
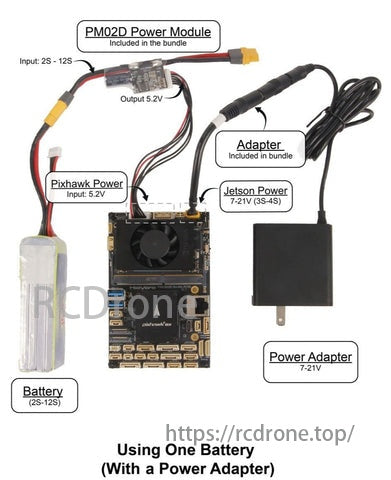
ماژول برق PM02D باتری را به Pixhawk و Jetson متصل میکند و از یک باتری با آداپتور برق برای ورودی 7-21 ولت استفاده میکند.
Related Collections