کنترل پرواز MATEK Mateksys F405-VTOL
کنترل پرواز MATEK Mateksys F405-VTOL
MATEKSYS
در دسترس بودن پیکاپ بارگیری نشد
MATEK Mateksys مشخصات کنترل پرواز F405-VTOL
استفاده از: وسایل نقلیه و اسباب بازی های کنترل از راه دور
سن پیشنهادی: 12+y,14+y,3-6y,6-12y,0-3y
منشا: سرزمین اصلی چین
مواد: مواد مرکب
نام تجاری: MATEKSYS
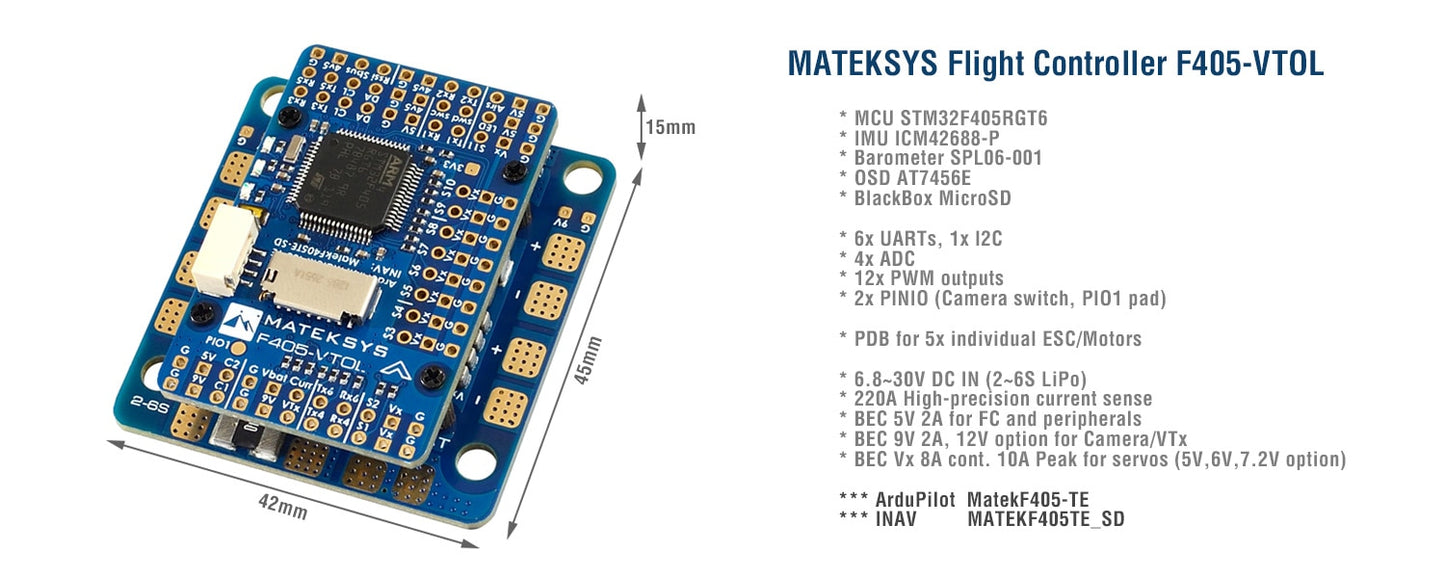
Flight Controller F405-VTOL STM32F405RGT6, ICM42688P, SPL06, OSD, VTOL PDB, 6xUARTs, 12x PWM,1xI2




مشخصات FC
-
MCU: STM32F405RGT6، 168MHz، 1MB Flash
-
IMU: ICM42688-P
-
بارو: SPL06-001
-
OSD: AT7456E
-
جعبه سیاه: اسلات کارت MicroSD
-
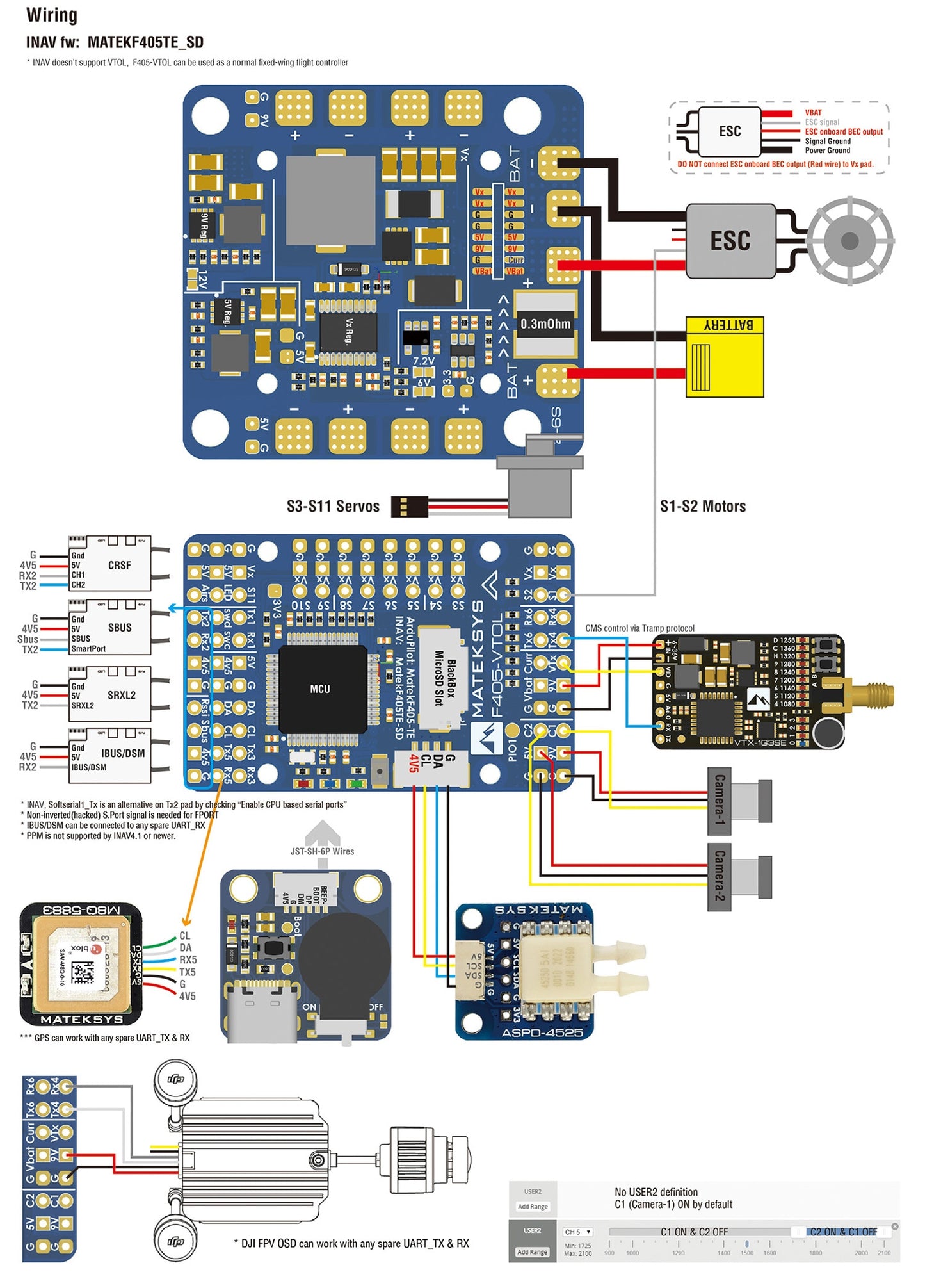
6x UART، 1x گزینه Softserial_Tx(INAV)
-
12x خروجی PWM
-
1x I2C
-
4x ADC (VBAT، جریان، RSSI، سرعت هوایی)
-
1x PINIO زاپاس
-
USB/Beep Extender با Type-C(USB2.0)
-
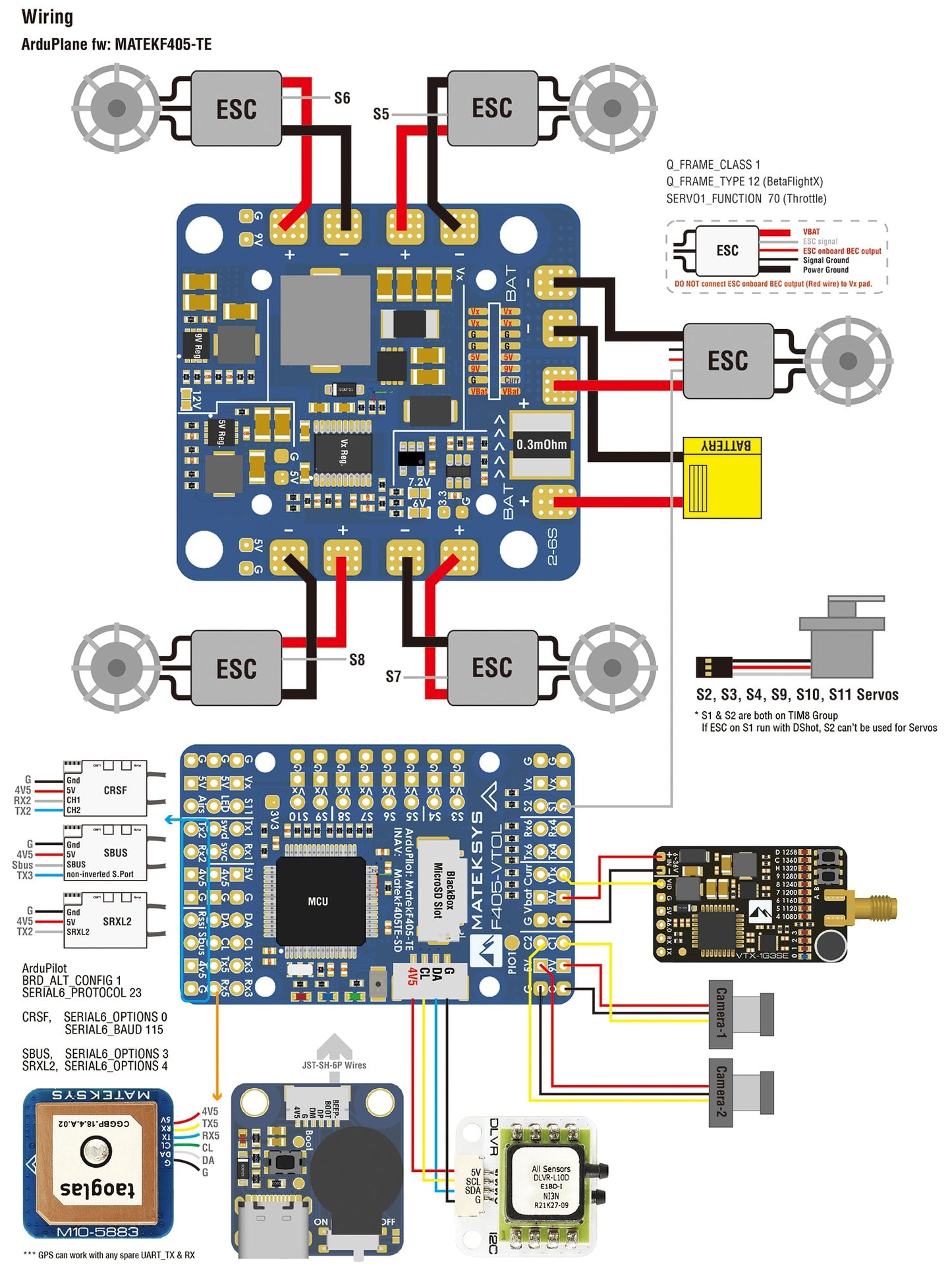
اینورتر داخلی در UART2-RX برای ورودی SBUS
-
ورودی دوربین دوگانه قابل تعویض
FC Firmware
-
ArduPilot: MatekF405-TE
-
INAV: MATEKF405TE_SD (INAV 5.0 یا جدیدتر)
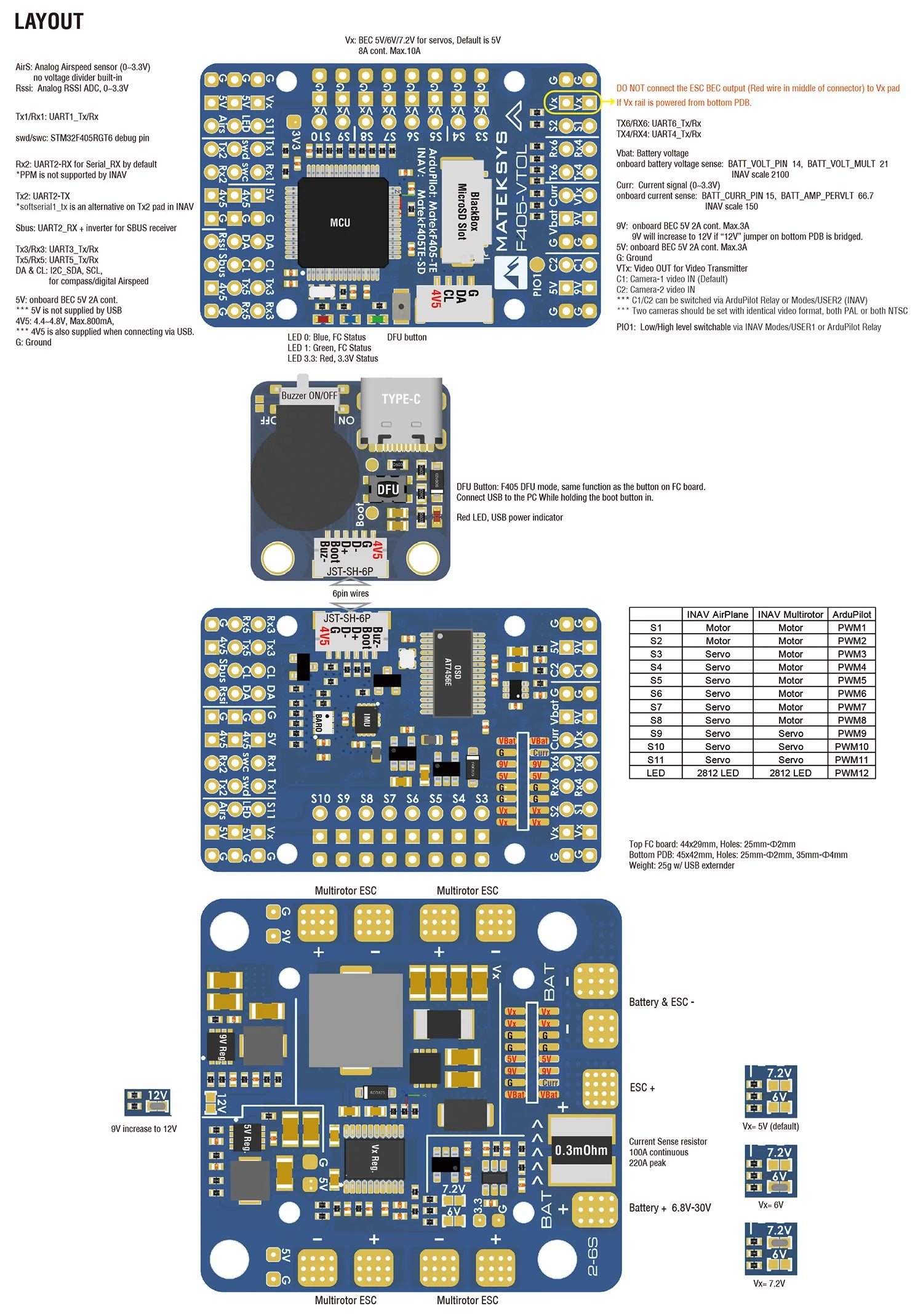
PDB
-
محدوده ولتاژ ورودی: 6.8~30V (2~6S LiPo)
-
مقاومت حس: 100 آمپر پیوسته، 220 آمپر پیک
-
پدهای برق 5 برابری ESC، در مجموع 100 آمپر پیوسته
-
پشتیبانی از بار پیوسته تا 100 آمپر روی پد ESC در نزدیکی مقاومت سنسور فعلی
-
پشتیبانی از بار مداوم تا 30 آمپر و پیک 50 آمپر در هر پد ESC کوادکوپتر
-
تقسیم کننده ولتاژ باتری 1K:20K (مقیاس 2100 در INAV، BATT_VOLT_MULT 21.0 در ArduPilot)
-
سنسور فعلی: 220A، 3.3V ADC (مقیاس 150 در INAV، 66.7 A/V در ArduPilot)
خروجی BEC 5V
-
طراحی شده برای کنترلر پرواز، گیرنده، OSD، دوربین، Buzzer، 2812 LED_Strip، Buzzer، ماژول GPS، AirSpeed
-
جریان پیوسته: 2 آمپر
خروجی BEC 9V /12V
-
طراحی شده برای فرستنده ویدئو، دوربین، گیمبال و غیره.
-
جریان پیوسته: 2 آمپر
-
گزینه
12 ولت با جامپر پد
-
برای خروجی پایدار 9V/12V، ولتاژ ورودی باید > ولتاژ خروجی +1V
خروجی BEC Vx
-
طراحی شده برای Servos
-
ولتاژ قابل تنظیم، 5 ولت پیش فرض، 6 ولت یا 7.2 ولت از طریق جامپر
-
جریان پیوسته: 8 آمپر، 10 آمپر پیک
-
برای خروجی Vx پایدار، ولتاژ ورودی باید > ولتاژ Vx +1V
خروجی BEC 3.3V
-
برای ماژول Baro / Compass و خارجی 3 طراحی شده است.لوازم جانبی 3 ولت
-
تنظیم کننده خطی
-
جریان پیوسته: 200mA
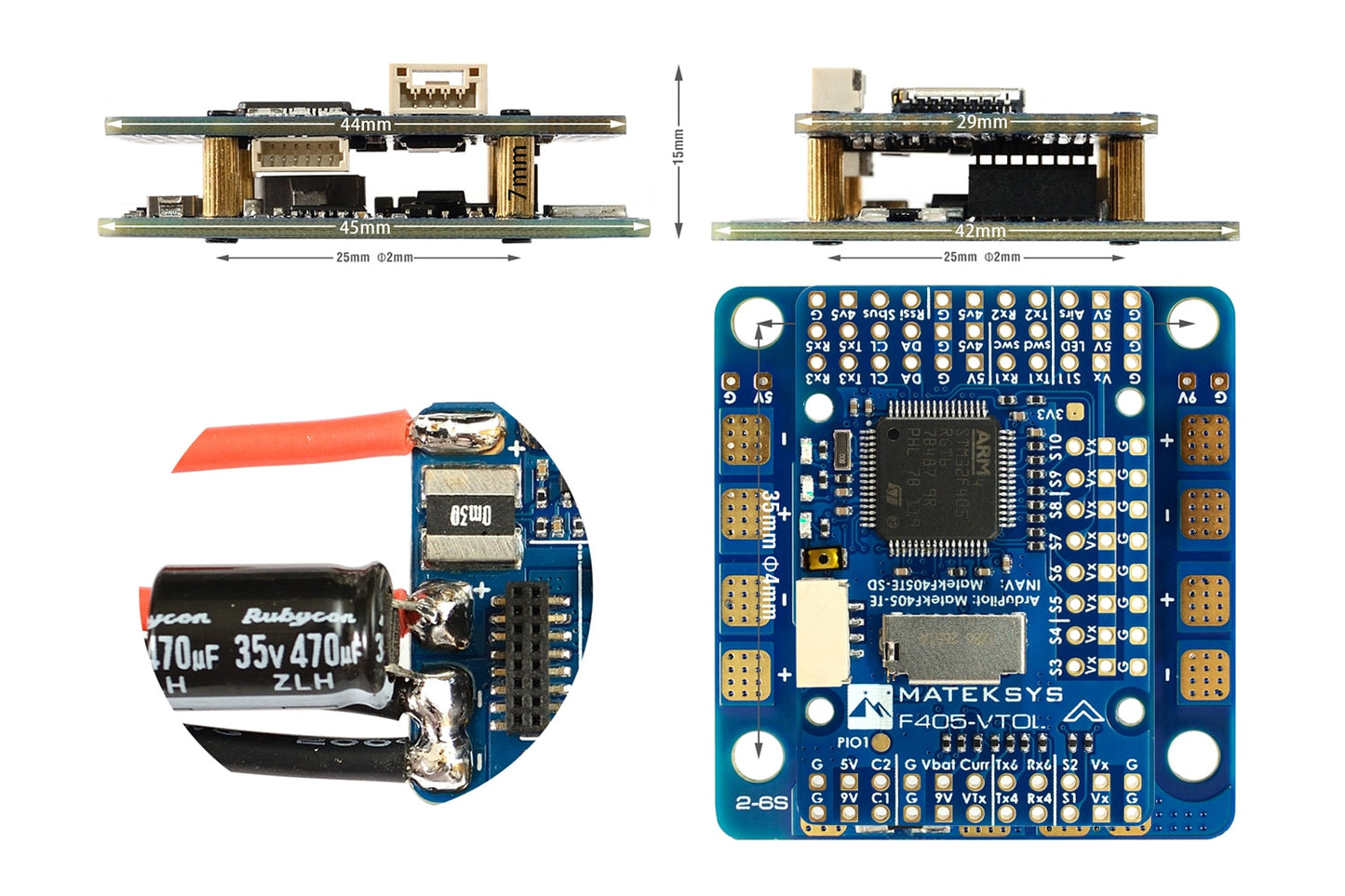
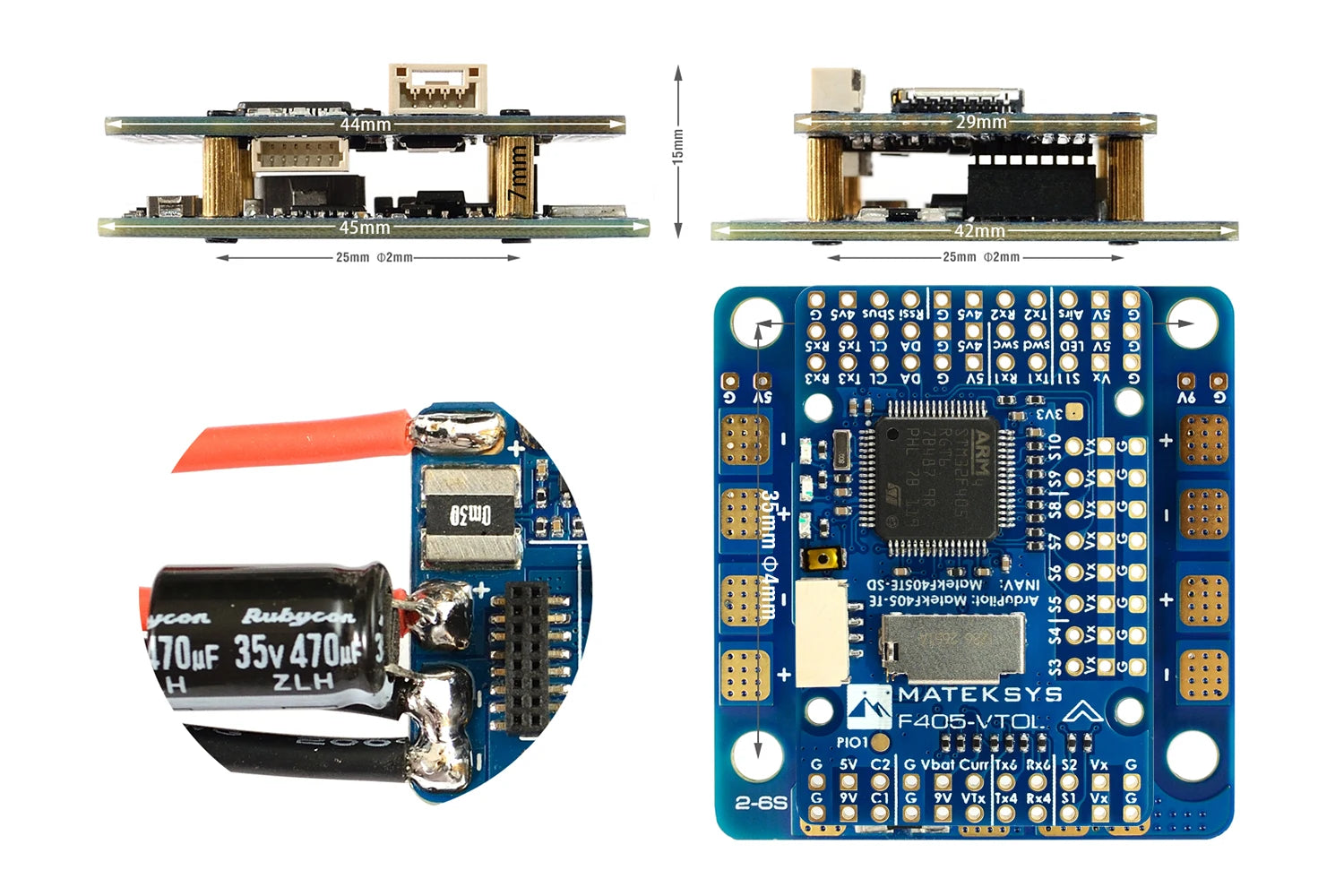
فیزیکی
-
نصب: 25 x 25mm-Φ2mm, 35 x 35mm- Φ4mm
-
ابعاد: 45 x 42 x 15mm
-
وزن: 25 گرم به همراه آداپتور USB/زوزگر
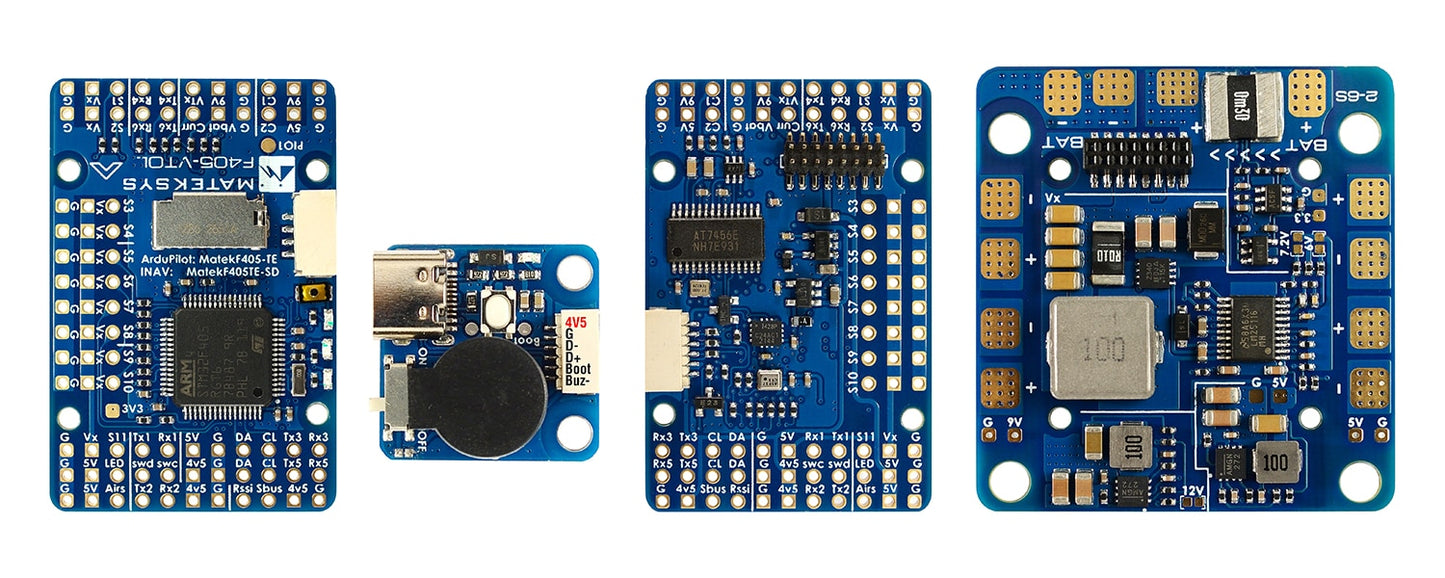
از جمله
-
1x F405-VTOL
-
1x USB(Type-C)/Beep (Buzzer Passive) توسعه دهنده + کابل 20 سانتی متری JST-SH-6P به JST-SH-6P برای توسعه دهنده USB.
-
کابل JST-GH-4P تا JST-GH-4P 1× 20 سانتی متر برای پورت I2C
-
1x Rubycon ZLH 35V 470uF خازن
-
Dupont 2.54 پین (برد بدون لحیم ارسال می شود)
نکات
-
F405-VTOL INAV fw برای QC از قبل بارگذاری شده است
-
هدف MATEKF405TE_SD در پیکربندی INAV 4.x.x فهرست نشده است، توسط 201 جدید یا 5 INer6>5 پشتیبانی میشود.
-
ArduPilot fw، تنظیم LOG_BACKEND_TYPE = 1 (فایل) برای گزارش کارت SD
Related Collections