


کنترلر پرواز MATEKSYS H7A3-SLIM - ICM42688P - ۳۰x۳۰
کنترلر پرواز MATEKSYS H7A3-SLIM - ICM42688P - ۳۰x۳۰
MATEKSYS
در دسترس بودن پیکاپ بارگیری نشد
ویژگیها
- نمایشگر روی صفحه
- نصب 30x30
- طراحی جمع و جور
- اتصال
- سبک وزن
مشخصات
مشخصات
- MCU: STM32H7A3RIT6، 280MHz Cortex-M7، 1.4MB RAM، 2MB Flash
- IMU: ICM42688P
- بارومتر: SPL06-001
- OSD: AT7456E
- بلک باکس: 128MB Flash (1G-bit NAND)
- 6x Uarts (1,2,3,4, 5, 6) با معکوسسازی داخلی.
- 11x خروجی PWM
- 1x I2C
- 1x CAN
- 4x ADC (VBAT، جریان، VB2، Cur2)
- 3x LED برای وضعیت FC (آبی، قرمز) و نشانگر 3.3V (قرمز)
- USB نوع-C (USB2.0)
- 8 خروجی PWM بر روی 2 کانکتور JST-SH1.0_8pin برای 2 ESC چهار در یک
- 1 کانکتور JST-GH1.25_4pin (5V/CAN-H/CAN-L/G)
- خروجی 9V با سوئیچ ON/OFF قابل تنظیم
- OSD ویدئویی دیجیتال توسط هر UART اضافی پشتیبانی میشود
قدرت
- ورودی Vbat: 6~36V (2~8S LiPo)
- BEC: 5V 2A مداوم (حداکثر 3A)
- BEC: 9V 2A مداوم (حداکثر 3A)
- LDO 3.3V: حداکثر 200mA
- حسگر جریان داخلی وجود ندارد
- پد ADC VB2 حداکثر 69V را پشتیبانی میکند (تقسیم ولتاژ: 1K:20K)
فریمور FC
- ArduPilot: MATEKH7A3 (4.6 یا جدیدتر)
- آردوپلین https://firmware.ardupilot.org/Plane/beta/MatekH7A3/
- آردوکوپتر &https://firmware.ardupilot.org/Copter/beta/MatekH7A3/
- فلش کردن با STM32CubeProgrammer
فیزیکی
- نصب: 30.5 x 30.5mm، Φ4mm با گرامت Φ3mm
- ابعاد: 36 x 36 x 5 mm
- وزن: 7g
- مرحله 3D H7A3-SLIM_step.zip
شامل
- 1x H7A3-SLIM
- 6x گرامت سیلیکونی M4 به M3
- 2x JST-SH1.0_8pin کابل، 5 سانتیمتر, & کانکتورهای 8 پین
- 1x کابل JST-GH-4P به JST-GH-4P برای پورت CAN، 20 سانتیمتر
جزئیات

کنترلر پرواز MATEKSYS H7A3-SLIM از یک MCU STM32H7A3 با IMU ICM42688P و یک پورت USB-C در الگوی نصب 30.5 میلیمتری استفاده میکند.

کنترلر پرواز MATEKSYS H7A3-SLIM از یک طرح فشرده 30x30 با یک پورت USB-C و پدهای بهوضوح علامتگذاری شده برای سیمکشی مرتب استفاده میکند.

MATEKSYS H7A3-SLIM از دو کانکتور JST-SH 1.0 8 پین بهعلاوه یک پورت JST-GH 4 پین و USB Type-C برای سیمکشی مرتب و راهاندازی آسان استفاده میکند.

MATEKSYS H7A3-SLIM از پدها و پورتهای لحیمکاری بهوضوح علامتگذاری شده برای اتصالات دوربین/VTx ویدئو، UARTها، CAN و برق استفاده میکند.
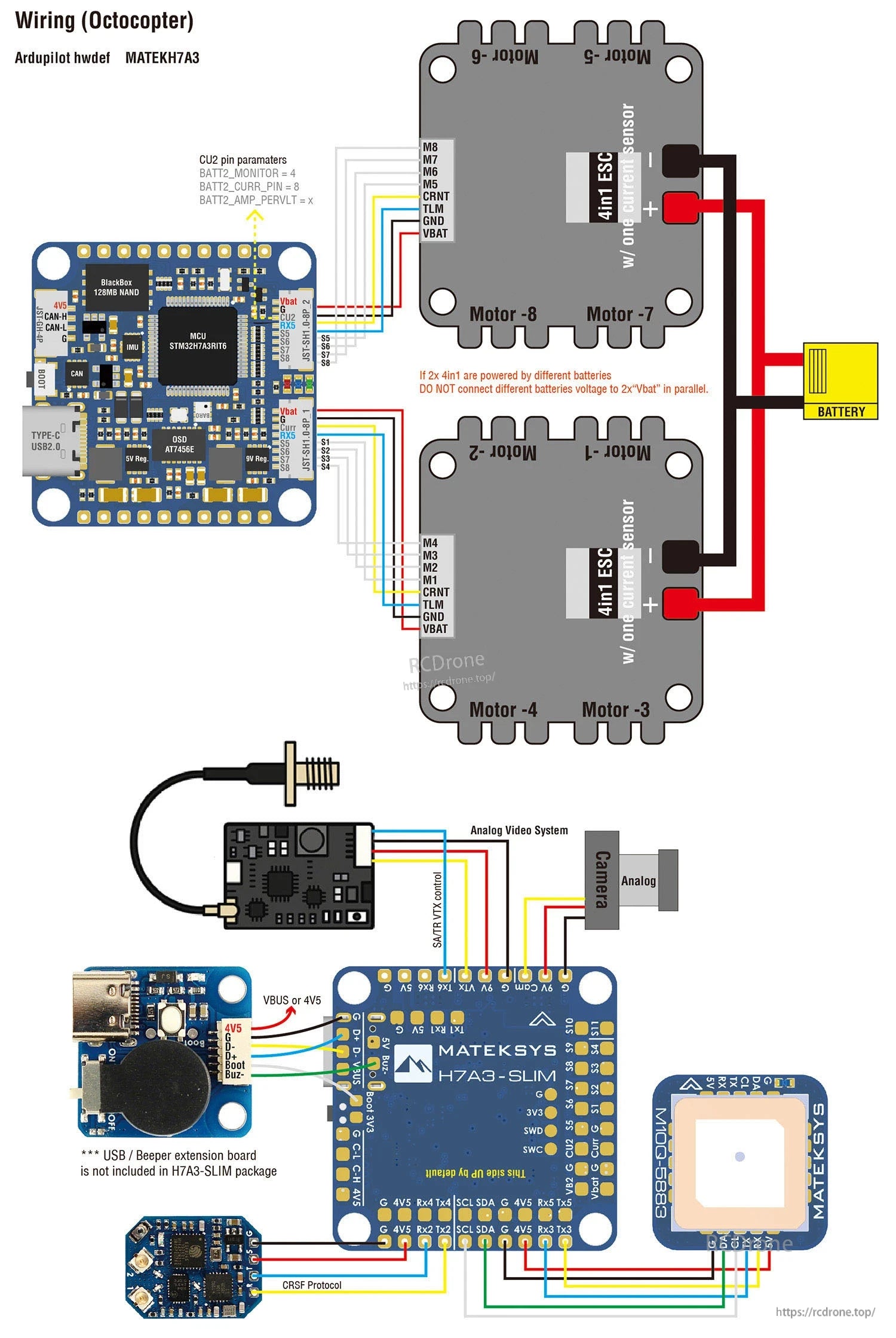
MATEKSYS H7A3-SLIM از پدهای با برچسب واضح برای اتصال دو ESC 4 در 1، منبع تغذیه VBAT، GPS، گیرنده و اجزای ویدئویی آنالوگ استفاده میکند.

نقشهبرداری ArduPilot
| ArduPilot | ||||||
| PWM | S1 | PWM1 GPIO50 | I/O با تحمل 5 ولت | TIM1_CH2 | DMA/Bi-DShot | گروه1 |
| S2 | PWM2 GPIO51 | I/O با تحمل 5 ولت | TIM1_CH3 | DMA/Bi-DShot | ||
| S3 | PWM3 GPIO52 | I/O با تحمل 5 ولت | TIM2_CH1 | DMA/Bi-DShot | گروه2 | |
| S4 | PWM4 GPIO53 | I/O با تحمل 5 ولت | TIM2_CH2 | DMA/Bi-DShot | ||
| S5 | PWM5 GPIO54 | I/O با تحمل 5 ولت | TIM3_CH3 | DMA/Bi-DShot | گروه3 | |
| S6 | PWM6 GPIO55 | ورودی/خروجی با تحمل 5 ولت | TIM3_CH4 | DMA/Bi-DShot | ||
| S7 | PWM7 GPIO56 | ورودی/خروجی با تحمل 5 ولت | TIM3_CH1 | DMA/Bi-DShot | ||
| S8 | PWM8 GPIO57 | ورودی/خروجی با تحمل 5 ولت | TIM3_CH2 | DMA/Bi-DShot | ||
| S9 | PWM9 GPIO58 | ورودی/خروجی با تحمل 5 ولت | TIM4_CH1 | DMA/DShot | گروه4 | |
| S10 | PWM10 GPIO59 | ورودی/خروجی با تحمل 5 ولت | TIM4_CH2 | DMA/DShot | ||
| S11 | PWM11 GPIO60 | ورودی/خروجی با تحمل 5 ولت | TIM16_CH1 | DMA/DShot | گروه5 | |
| PWM1~PWM11 قابلیت Dshot و PWM را دارند.با این حال، ترکیب عملیات Dshot و PWM معمولی برای خروجیها به گروهها محدود است، به این معنی که فعالسازی Dshot برای یک خروجی در یک گروه نیاز دارد که تمام خروجیها در آن گروه به عنوان Dshot پیکربندی و استفاده شوند، نه به عنوان خروجیهای PWM. اگر سروو و موتور در یک گروه مخلوط شوند، اطمینان حاصل کنید که این گروه با پایینترین فرکانس PWM مطابق با مشخصات سروو کار کند. به عبارت دیگر، اگر سروو حداکثر 50Hz را پشتیبانی کند، ESC باید در این گروه با 50Hz کار کند. |
||||||
| PINIO | کلید 9V | GPIO81 | RELAY1_PIN | 81 | ||
| ADC | پد Vbat | BATT_VOLTAGE_SENS | 6~36V | BATT_VOLT_PIN BATT_VOLT_MULT |
10 21.0 |
|
| پد Curr | BATT_CURRENT_SENS | 0~3.3V | پین جریان باتری آمپراژ باتری به ازای ولت |
11 X |
||
| پد VB2 | حسگر ولتاژ باتری 2 | 0~69V | پین ولتاژ باتری 2 ضریب ولتاژ باتری 2 |
18 21.0 |
||
| پد CU2 | حسگر جریان باتری 2 | 0~3.3V | پین جریان باتری 2 آمپراژ باتری 2 به ازای ولت |
8 X |
||
| I2C | SCL/SDA | I2C3 | ورودی/خروجی با تحمل 5 ولت | بارومتر روی برد SPL06-001 | آدرس | 0x76 |
| سرعت هوای دیجیتال I2C MS4525 DLVR-L10D |
BUS سرعت هوا نوع سرعت هوا نوع سرعت هوا |
0 1 9 |
||||
| مغناطیسسنج | قطبنما خودکار | 1 | ||||
| CAN | C-H/C-L | CAN2 | ورودی/خروجی با تحمل 5 ولت | CAN | پروتکل CAN_D1 درایور CAN_P1 |
1 1 |
| میتوان GPS میتوان قطب نما میتوان حسگر سرعت هوا |
نوع GPS ماسک نوع قطب نما نوع ARSPD |
9 0 8 |
||||
| UART | USB | USB | کنسول | پروتکل SERIAL0 | 2 | |
| TX1 RX1 | USART1 با DMA | I/O با تحمل 5 ولت | تلمتری | پروتکل SERIAL1 | 2 | |
| TX2 RX2 | USART2 با DMA | I/O با تحمل 5 ولت | ورودی RC/گیرنده | پروتکل SERIAL2 | 23 | |
| TX3 RX3 | USART3 با DMA | I/O با تحمل 5 ولت | GPS | پروتکل سریال 3 | 5 | |
| TX4 RX4 | UART4 بدون DMA | ورودی/خروجی با تحمل 5 ولت | اضافی | پروتکل سریال 4 | -1 | |
| TX5 RX5 | UART5 بدون DMA | ورودی/خروجی با تحمل 5 ولت | اضافی | پروتکل سریال 5 | -1 | |
| TX6 RX6 | USART6 بدون DMA | ورودی/خروجی با تحمل 5 ولت | اضافی | پروتکل سریال 6 | -1 | |
ورودی RC
ورودی RC بر روی USART2 (پروتکل سریال 2) پیکربندی شده است.این از تمام پروتکلهای سری RC پشتیبانی میکند. SERIAL2_PROTOCOL=23 بهطور پیشفرض است.
- PPM پشتیبانی نمیشود.
- CRSF به اتصال Tx2 & Rx2 نیاز دارد و SERIAL2_OPTIONS را به "0" (پیشفرض) تنظیم کنید.
- SBUS/DSM/SRXL به پین Rx2 متصل میشود، اما SBUS نیاز دارد که SERIAL2_OPTIONS به "3" تنظیم شود.
- FPort نیاز به اتصال به Tx2 دارد و SERIAL2_OPTIONS را به "7" تنظیم کنید. اگر تلمتری کار نکرد، سعی کنید SERIAL7_OPTIONS = 135.
- SRXL2 نیاز به اتصال به Tx2 دارد و بهطور خودکار تلمتری را فراهم میکند. SERIAL2_OPTIONS را به "4" تنظیم کنید.
- هر UART نیز میتواند برای اتصالات سیستم RC در ArduPilot استفاده شود و با تمام پروتکلها به جز PPM سازگار است. برای جزئیات به سیستمهای کنترل رادیویی مراجعه کنید.
رله آردوپایلوت (PINIO)
- خروجی 9V به طور پیشفرض روشن است
- PC13 PINIO1 خروجی GPIO(81) //قدرت 9V switche.g.
- عملکرد رله 1 1
- پین رله 1 81 // PINIO1 GPIO
- گزینه RC7 28 // روشن/خاموش رله، از CH7 فرستنده برای تنظیم 9V روشن/خاموش استفاده کنید
ویژگی پیکربندی شده زمانی فعال میشود که مقدار pwm سوئیچ کمکی بالاتر از 1800 شود. این ویژگی زمانی غیرفعال میشود که مقدار به زیر 1200 برسد.
مقدار pwm ارسال شده از فرستنده را زمانی که سوئیچ بالا و پایین است با استفاده از صفحه تنظیمات اولیه برنامه Mission Planner بررسی کنید >> سختافزار الزامی >> صفحه کالیبراسیون رادیو.اگر بالاتر از 1800 یا پایینتر از 1200 نرود، بهتر است نقاط انتهایی سروو را در فرستنده تنظیم کنید.
Related Collections


