


کنترلر پرواز براشلس BetaFPV Matrix 1S (۵ در ۱) با STM32G473، ELRS ۲.۴ گیگاهرتز، فرستنده تصویر ۵.۸ گیگاهرتز ۴۰۰ میلیوات
کنترلر پرواز براشلس BetaFPV Matrix 1S (۵ در ۱) با STM32G473، ELRS ۲.۴ گیگاهرتز، فرستنده تصویر ۵.۸ گیگاهرتز ۴۰۰ میلیوات
BETAFPV
در دسترس بودن پیکاپ بارگیری نشد
بررسی اجمالی
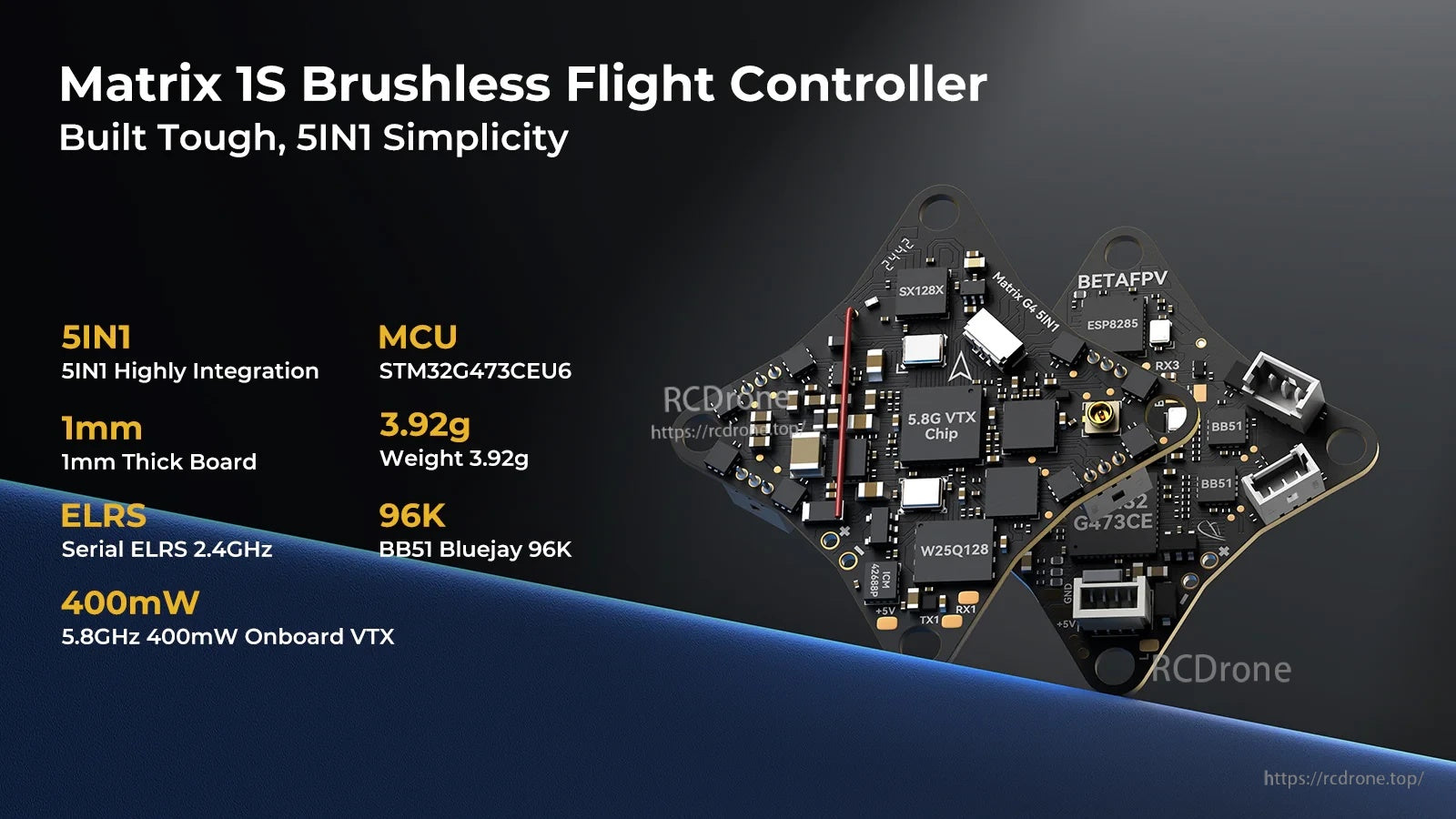
کنترلر پرواز بدون برس BetaFPV Matrix 1S (5IN1) یک کنترلر پرواز با ادغام بالا است که برای مبتدیان و علاقهمندان به FPV طراحی شده و FC + VTX + OSD + ESC + RX را بر روی یک برد محکم به ضخامت 1.0 میلیمتر ترکیب میکند. این کنترلر دارای کانکتورهای موتور داخلی برای سادهسازی نصب (بدون نیاز به جوشکاری) است، یک MCU STM32G473CEU6، RX سریال ELRS 2.4GHz روی برد و یک VTX 5.8GHz با قدرت خروجی تا 400mW دارد.
ویژگیهای کلیدی
- طراحی 5IN1 با ادغام بالا (FC + VTX + OSD + ESC + RX)
- برد به ضخامت 1.0 میلیمتر برای افزایش دوام
- MCU: STM32G473CEU6 (با افزایش سرعت محاسباتی 55% نسبت به F411)
- پلاگ موتور داخلی / کانکتور موتور: JST1.25
- RX سریال ELRS 2.4GHz روی برد (V3.4.3)
- VTX 5.8GHz روی برد: 48 کانال، تا 400mW؛ SmartAudio 2.0 کنترل؛ حالت PIT پشتیبانی میشود
- ESC مبتنی بر BB51 Bluejay 96K (پشتیبانی از DShot300 / DShot600)
مشخصات
| کنترلر پرواز (FC) | |
| MCU | STM32G473CEU6 |
| ژیروسکوپ | ICM42688P |
| حداکثر نرخ نمونهبرداری ژیروسکوپ (اطلاعات مقایسهای) | ICM42688P، 8KHz |
| حافظه بلک باکس | 16MB |
| سنسور | ولتاژ & جریان |
| BEC | 5V، حداکثر 3A |
| UART | UART1، UART2 (برای VTX)، UART3 (برای RX)، UART4 |
| Betaflight OSD | AT7456E |
| ESC (یکپارچه) | 5A مداوم |
| RX (یکپارچه) | سری ELRS 2.4GHz (V3.4.3) |
| VTX (یکپارچه) | 5.8GHz 48 کانال، حداکثر 400mW |
| فریمور FC | Betaflight_4.5.0_BETAFPVG473 |
| پورت USB | SH1.0-4Pin |
| کانکتور موتور | JST1.25 |
| کانکتور باتری | BT2.0 |
| اندازه سوراخ نصب | 26mm x 26mm |
| ضخامت PCB | 1.0mm |
| وزن | 3.92 +/- 0.1g (آنتن VTX مستثنی است) |
| ESC | |
| ورودی برق | فقط 1S |
| جریان | 5A مداوم، 8A اوج |
| فریمور ESC | A_X_5_96KHz_V0.19.hex برای BB51 Bluejay firmware |
| پروتکل سیگنال دیجیتال | DShot300, DShot600 |
| VTX | |
| قدرت خروجی | 25 / 100 / 200 / 400 / PIT |
| فرکانس | 5.8GHz 48 کانال؛ Raceband: 5658~5917MHz |
| انتخاب کانال | SmartAudio 2.0 |
| نوع مدولاسیون | FM |
| کنترل فرکانس | PLL |
| همه هارمونیک | حداکثر -50dBm |
| پایداری فرکانس | +/-100KHz (معمولی) |
| دقت فرکانس | +/-200KHz (معمولی) |
| خطای حامل کانال | +/-1.5dB |
| پورت آنتن | 50 اهم |
| دمای عملیاتی | -10°C تا +80°C |
پین اوت / پدها (برچسبهای دیاگرام)
- برچسبهای جلوی بالا: RX ANT, CAM in, VTX ANT, BATT+(1S), GND, +5V, RX1, TX1
- برچسبهای جلوی پایین: FC-RX-BOOT; CAM in / +5V / GND; TX4 / RX4 / +5V / GND; TX3; RX3; BZ+ / BZ-; ESC1 / ESC2 / ESC3 / ESC4; GND; +5V; USB-DM; USB-DP; USB; RGB LED
یادداشتهای تنظیمات (توجه)
- کنترلکنندههای پرواز برای نقصهای تولیدکننده پوشش داده شدهاند. مشکلات ناشی از خطاهای کاربر، آسیبهای ناشی از تصادف فیزیکی، آسیب در حین نصب یا جداسازی، تغییرات، نوسانات برق، آتشسوزیهای الکتریکی یا تماس با آب پوشش داده نمیشوند.
- قدرت VTX: قدرت بالاتر VTX انرژی بیشتری مصرف میکند و گرمای بیشتری تولید میکند که زمان پرواز را کاهش میدهد.برای زمان پرواز بهتر در سناریوهای داخلی، از قدرت 25~100mW استفاده کنید.
- آنتن VTX: قبل از روشن کردن کنترلر پرواز، آنتن انتقال تصویر را متصل و نصب کنید. به طور جایگزین، قدرت انتقال را روی 0 تنظیم کنید تا از سوختن جلوگیری شود.
- به طور پیشفرض، UART2 به VTX متصل است و UART3 به RX متصل است. یادداشتی برای حذف یک مقاومت به منظور آزاد کردن UART3 ارائه شده است.
- هنگام تنظیم VTX آنالوگ، لوازم جانبی برای UART2 باید به عنوان VTX (TBS SmartAudio) تنظیم شوند. برای گیرنده، UART3 را به عنوان Serial RX پیکربندی کنید.
RX ELRS 2.4G سریال (بایندینگ & بهروزرسانی)
- وارد وضعیت بایندینگ شوید با روشن/خاموش کردن سه بار: کنترلر پرواز را سه بار وصل و جدا کنید.
- چشمک سریع دوگانه LED RX نشاندهنده حالت بایند است؛ نور ثابت نشاندهنده این است که بایند شده است.
- RX ELRS 2.4G سریال میتواند از طریق Wi-Fi یا پاسترو از Betaflight بهروزرسانی شود.مراحل عبور شامل انتخاب هدف "BETAFPV 2.4GHz AIO RX" و فلش کردن از طریق گزینه عبور Betaflight در ExpressLRS Configurator.
مراجع نرمافزار / پیکربندی
- نرمافزار FC: Betaflight_4.5.0_BETAFPVG473 (فایل نرمافزار و CLI dump): صفحه دانلود رسمی
- مرجع انتشار Betaflight (4.5.0): https://github.com/betaflight/betaflight/releases/tag/4.5.0
- توجه: از تاریخ 5 ژانویه 2026، واحدها ممکن است با ژیروسکوپ BMI270 ارسال شوند؛ نسخه ژیروسکوپ را قبل از فلش کردن نرمافزار بررسی کنید تا از سازگاری اطمینان حاصل شود.
یادداشتهای نرمافزار ESC Bluejay
- بر اساس راهحل ESC BB51؛ نرمافزار مرجع: A_X_5_96KHz_V0.19.hex برای سختافزار Bluejay BB51.
- ابزارها / دانلودها: پیکربندی ESC, BLHeliSuite16714903, انتشارات Bluejay, مخزن Bluejay
- نام فایلهای فریمور اضافی اشاره شده: A_X_5_48_v0.19.2.hex, A_X_5_96_v0.19.2.hex, A_X_70_24_v0.19.2.hex
- هشدار: فریمور را با فاصله زمانی کوتاهتر فلش نکنید؛ ممکن است باعث توقف و آسیب به کنترلر پرواز شود.
برنامهها
- مدلهای پیشنهادی برای کنترلر پرواز Matrix FC 5IN1: Meteor65 Pro, Meteor75 Pro
- Meteor75 Pro به عنوان مدل ارتقا یافته با کنترلر پرواز بدون براش Matrix 1S از 20 نوامبر ذکر شده است
موارد موجود
- 1 x کنترلر پرواز بدون براش Matrix 1S
- 1 x آداپتور Type-C به SH1.0
- 1 x کابل آداپتور SH1.0-4Pin
- 4 x پیچ خودکار M1.2 x 4
- 4 x M1.4 x پیچ خودکار 4 x
- 4 x توپهای جذب شوک
برای کمک در انتخاب محصول، راهنمایی در مورد سیمکشی، یا پشتیبانی پس از فروش، با [email protected] or تماس بگیرید https://rcdrone.top/.
جزئیات
یک برد جمع و جور 5 در 1 1S که کنترلکننده پرواز، ESC، VTX، OSD و گیرنده ELRS را ترکیب میکند تا ساختهای فوق سبک را تمیز و ساده نگه دارد.
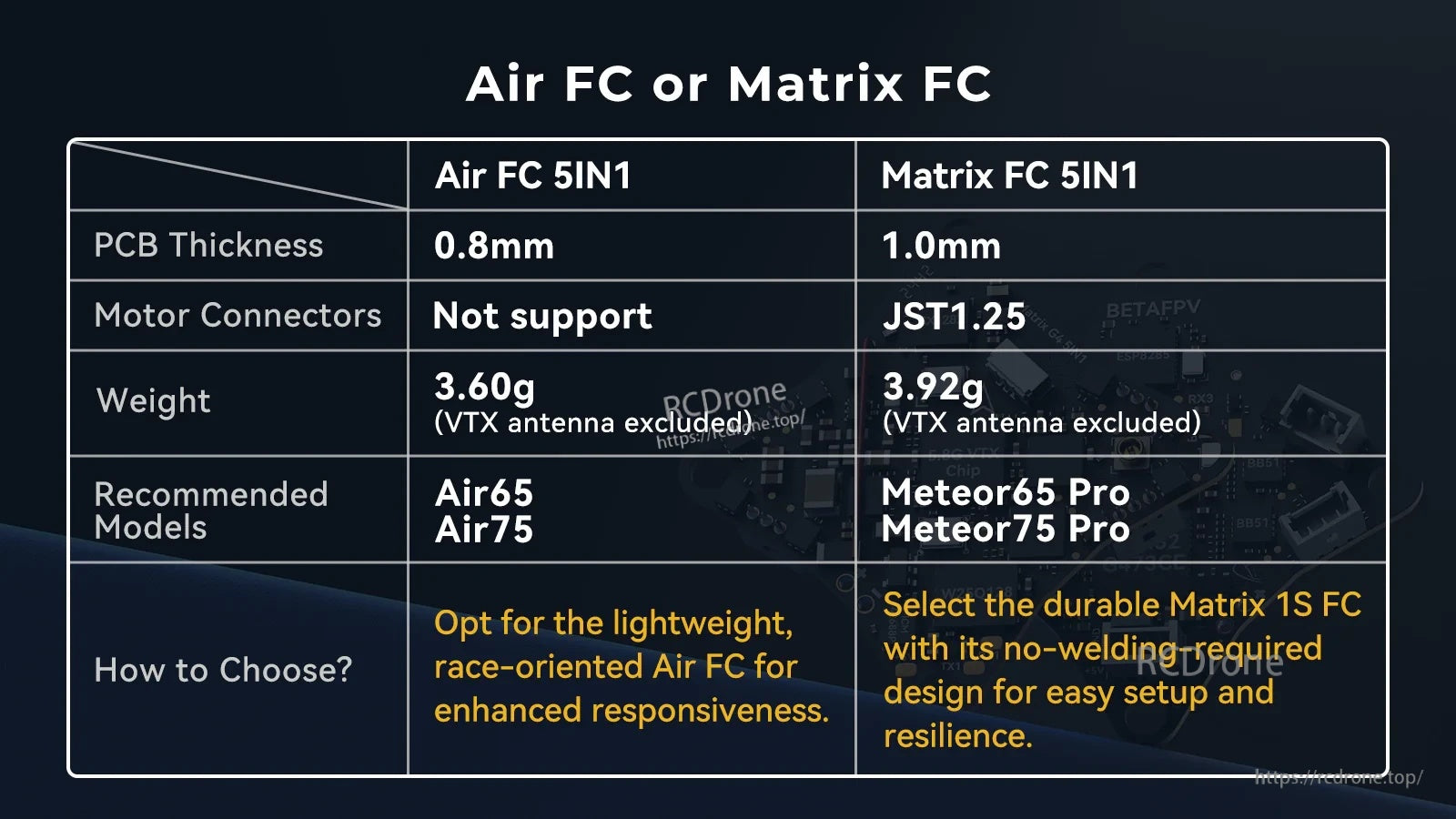
گزینه Matrix را انتخاب کنید زمانی که میخواهید یک برد ضخیمتر 1.0mm و سوکتهای موتور JST1.25 برای نصب سریع و بدون لحیمکاری موتور داشته باشید.

بر اساس STM32G473 MCU ساخته شده است، با ELRS 2.4GHz سریال داخلی و یک VTX 5.8GHz با قدرت تا 400mW برای تنظیمات FPV 1S قابلقبول.
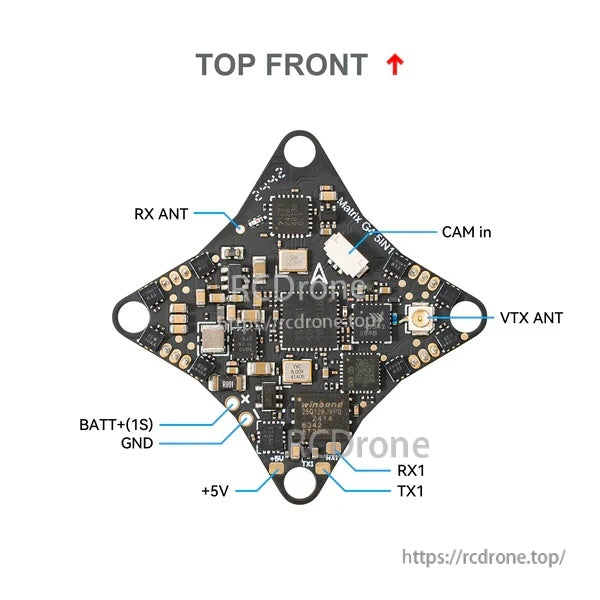
برچسبهای پد بالایی سیمکشی را برای اتصالات دوربین/آنتن VTX، ورودی برق 1S و UART1 ساده میکند.
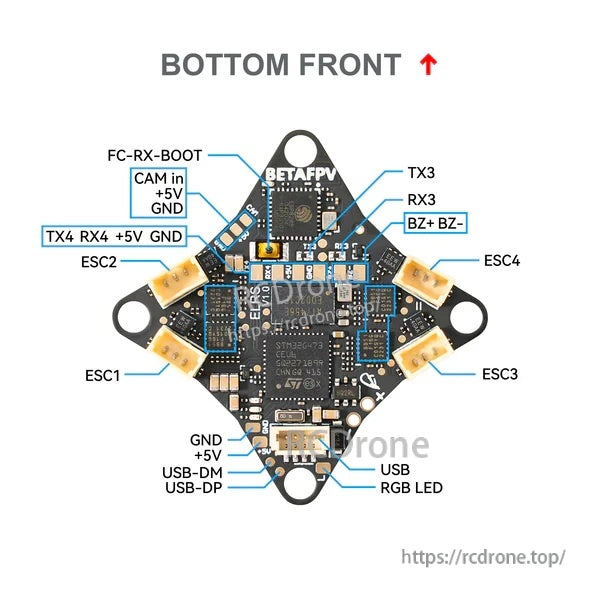
قسمت زیرین USB، UARTها، پدهای بوق و چهار خروجی ESC/موتور را برای مسیریابی تمیز در فریمهای تنگ جدا میکند.

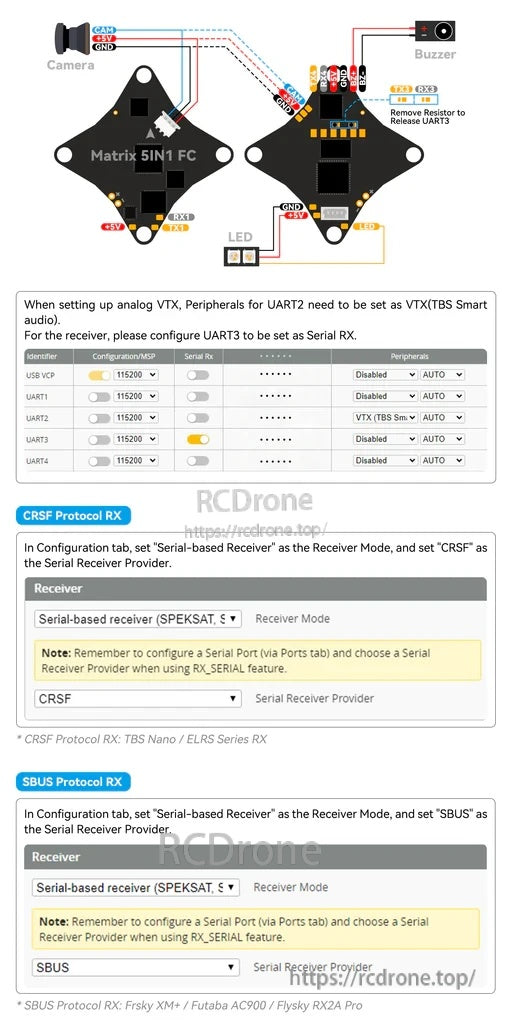
یک مرجع سریع برای سیمکشی و تنظیم Betaflight برای کنترل VTX آنالوگ و پیکربندی گیرنده سریال onboard.

لوازم جانبی شامل به شما کمک میکند تا بلافاصله شروع کنید، با کنترلر پرواز، سختافزار نصب و کابلهای اتصال که در یک قوطی محافظ بستهبندی شدهاند.
Related Collections


