




کنترلر پرواز براشلس BetaFPV Matrix 1S AIO 3IN1/4IN1، STM32G473، ELRS 2.4G، 12A/18A
کنترلر پرواز براشلس BetaFPV Matrix 1S AIO 3IN1/4IN1، STM32G473، ELRS 2.4G، 12A/18A
BETAFPV
در دسترس بودن پیکاپ بارگیری نشد
بررسی اجمالی
کنترلر پرواز بدون براش Matrix 1S BetaFPV یک پلتفرم کنترل پرواز 1S هوپ است که در دو نسخه ارائه میشود: Matrix 1S 3IN1 (FC + ESC + گیرنده سری ELRS 2.4GHz روی برد؛ بدون OSD آنالوگ) و Matrix 1S 4IN1 (که OSD بتافلایت و پدهای لحیمکاری برای VTX آنالوگ خارجی را اضافه میکند). این کنترلر از MCU STM32G473CEU6 و طراحی برد به سبک کراس استفاده میکند و برای نصب آسان بر روی ساختهای میکرو 1S طراحی شده است.
ویژگیهای کلیدی
- دو معماری: 3IN1 برای ساختهای دیجیتال HD (با پورت VTX دیجیتال SH1.0-6Pin و پلاگهای موتور) و 4IN1 برای ساختهای آنالوگ (با OSD و پدهای لحیمکاری VTX آنالوگ خارجی).
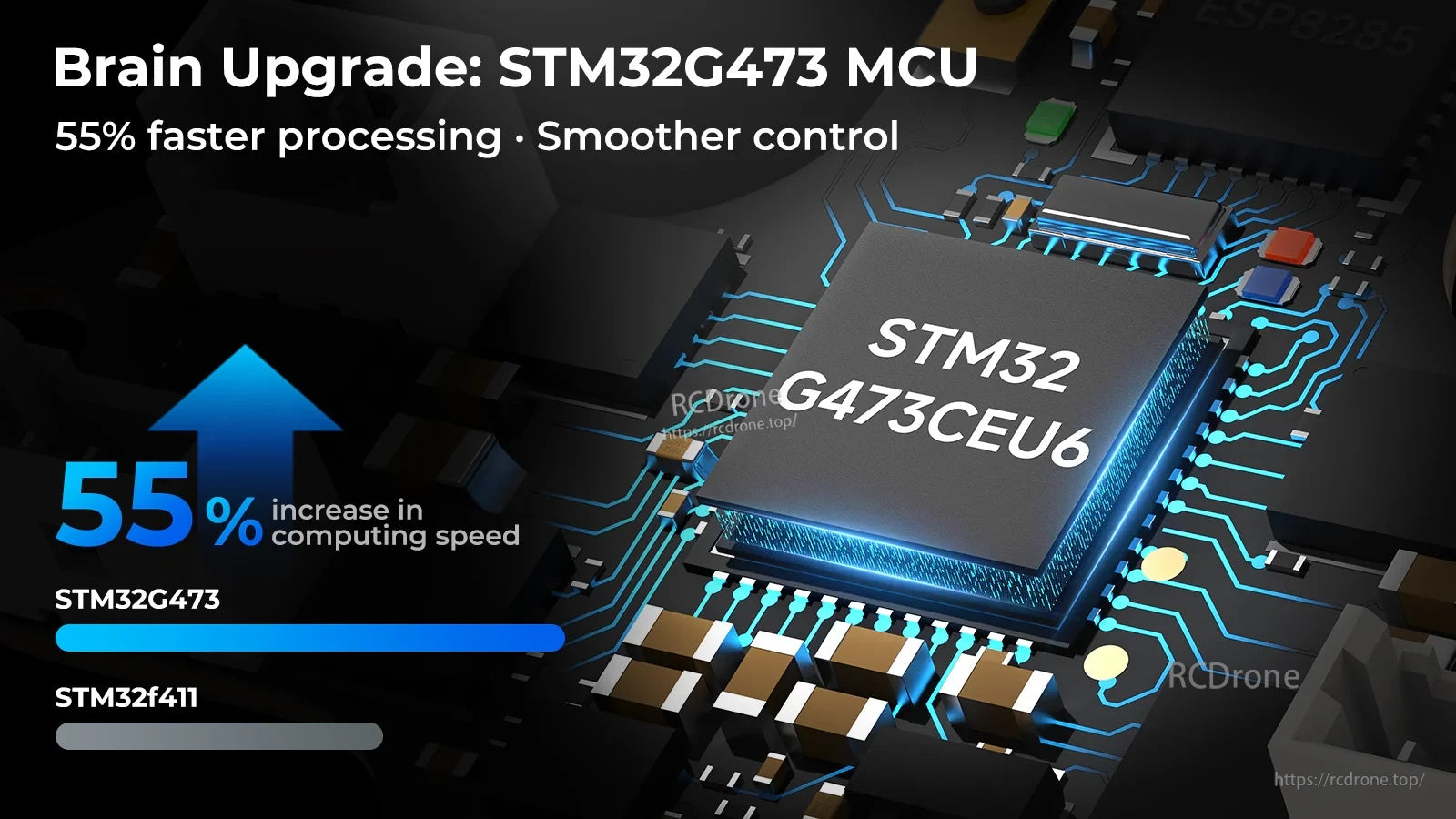
- MCU: STM32G473CEU6 (168MHz)؛ اعلام شده است که 55% سریعتر از پردازش F411 است.
- خروجی ESC: 12A مداوم، 18A اوج؛ از DSHOT300 و DSHOT600 پشتیبانی میکند.
- BEC جدید: 5V/3A؛ طراحی منبع تغذیه LDO 3.3V مستقل از IMU.
- گیرنده سری ELRS 2.4GHz روی برد (V3.4.3)، پروتکل CRSF.
- یادداشت دوام: تخته 1 میلیمتری؛ ویژگیهای نصب بدون لحیمکاری در نسخه 3IN1.
مشخصات
کنترلکننده پرواز (FC)
| MCU | STM32G473CEU6 (168MHz) |
| ژیروسکوپ | ICM42688P |
| حداکثر نرخ نمونهبرداری ژیروسکوپ (جدول مقایسه) | ICM42688P، 8KHz |
| حافظه بلک باکس | 16MB (همچنین به عنوان 16M نشان داده شده است) |
| سنسور | ولتاژ &جریان |
| BEC | 5V/3A |
| تأمین مستقل IMU | 3.3V LDO (LDO مستقل از IMU) |
| ESC (سوار بر روی برد) | 12A مداوم |
| RX | سری ELRS 2.4GHz (V3.4.3) |
| پورت USB | SH1.0-4Pin |
| کانکتور باتری | BT2.0 |
| پلاگ موتور | JST1.25-3Pin (همچنین به عنوان JST1.25 نشان داده شده است) |
| اندازه نصب | 25.5mm x 25.5mm |
ورژن خاص I/O
| UART (3IN1) | UART 1 (فقط RX/SBUS)، UART 2 (آزاد)، UART 3 (برای RX)، UART 4 (آزاد/HD MSP) |
| UART (4IN1) | UART 1 (برای VTX)، UART 2 (آزاد)، UART 3 (برای RX)، UART 4 (هیچ) |
| OSD | AT7456E (فقط نسخه 4IN1) |
| پورت VTX دیجیتال HD | SH1.0-6Pin (فقط نسخه 3IN1) |
وزن
| 3IN1 | 3.8±0.1g (کانکتور باتری مستثنی است)؛ 4.2±0.1g (کانکتور باتری شامل است) |
| 4IN1 | 3.6±0.1g (کانکتور باتری مستثنی است)؛ 4.6±0.1g (اتصال باتری شامل میشود) |
ESC
| ورودی برق | فقط 1S |
| جریان | 12A مداوم، 18A اوج |
| پروتکل سیگنال دیجیتال | DSHOT300، DSHOT600 |
| فریمور ESC | A_X_5_96_v0.19.2.hex برای فریمور BB51 Bluejay |
جدول مقایسه (طبق ارائه شده)
| Matrix 1S 3IN1 | Matrix 1S 4IN1 | F4 1S 5A AIO | |
| MCU | STM32G473CEU6 | STM32F411CEU6 | |
| فرکانس MCU | 168MHz | 108MHz | |
| ژیروسکوپ، حداکثر نرخ نمونهبرداری | ICM42688P، 8KHz | BMI270، 3.2KHz | |
| ESC | 12A مداوم | 1S, 5A | |
| حافظه بلک باکس | 16M | 8M | |
| OSD | - | OSD بتافلایت: AT7456E | |
| RX | ELRS 2.4GHz سریال روی برد | ||
| پلاگ موتور | JST1.25 | ||
| وزن | 3.8g | 3.6g | 3.64g |
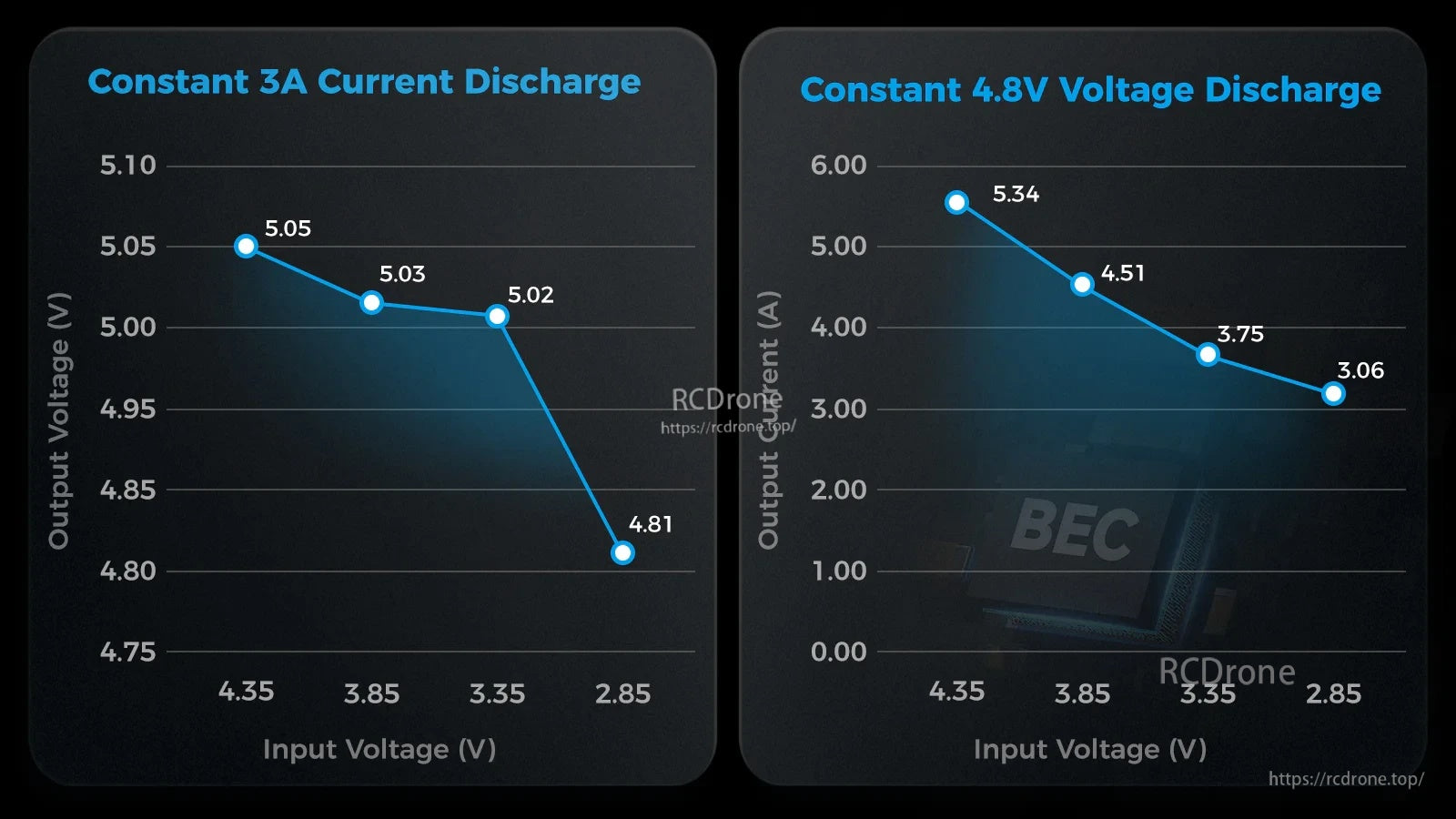
دادههای تست BEC (همانطور که نشان داده شده است)
- تخلیه جریان ثابت 3A: ورودی 4.35V → خروجی 5.05V; 3.85V → 5.03V; 3.35V → 5.02V; 2.85V → 4.81V
- تخلیه ولتاژ ثابت 4.8V: ورودی 4.35V → خروجی 5.34A; 3.85V → 4.51A; 3.35V → 3.75A; 2.85V → 3.06A
پورتها & یادداشتهای تنظیمات (از نمودارها)
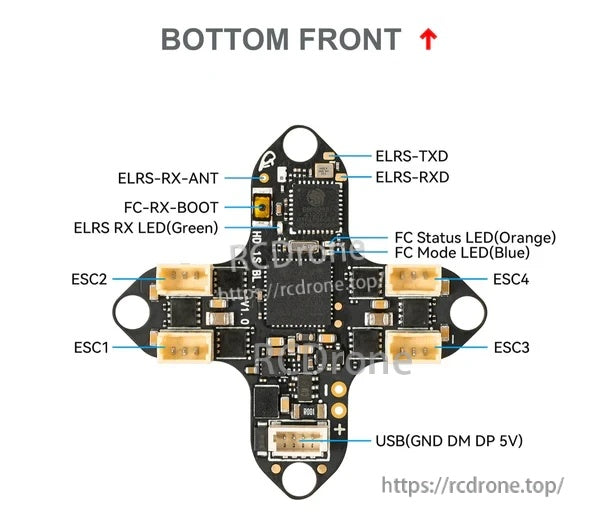
- پین اوت USB نشان داده شده: USB (GND, DM, DP, 5V).
- برچسبهای برد 3IN1 شامل: RX3، RX2، TX2، TX3؛ BATT-، BATT+(1S)، 5V، GND؛ SBUS (RX1)، RX4، TX4؛ LED؛ ELRS-RX-ANT؛ ELRS-TXD، ELRS-RXD؛ FC-RX-BOOT؛ ELRS RX LED (سبز)؛ FC Status LED (نارنجی)؛ FC Mode LED (آبی)؛ ESC1/ESC2/ESC3/ESC4.
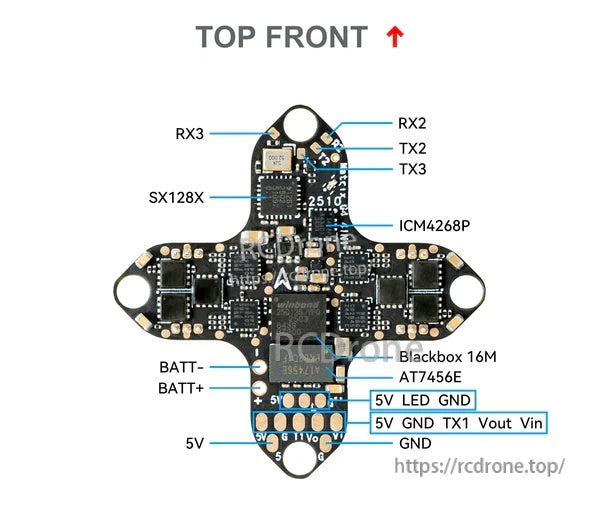
- برچسبهای برد 4IN1 شامل: SX128X؛ ICM42688P؛ Blackbox 16M؛ AT7456E؛ ELRS-RX-ANT؛ ELRS-TXD، ELRS-RXD؛ ESP8285؛ STM32G473؛ FC-RX-BOOT؛ FC Status LED؛ FC-Mode LED؛ ESC1/ESC2/ESC3/ESC4؛ به علاوه برچسبهای پد شامل 5V/LED/GND و 5V/GND/TX1/Vout/Vin.
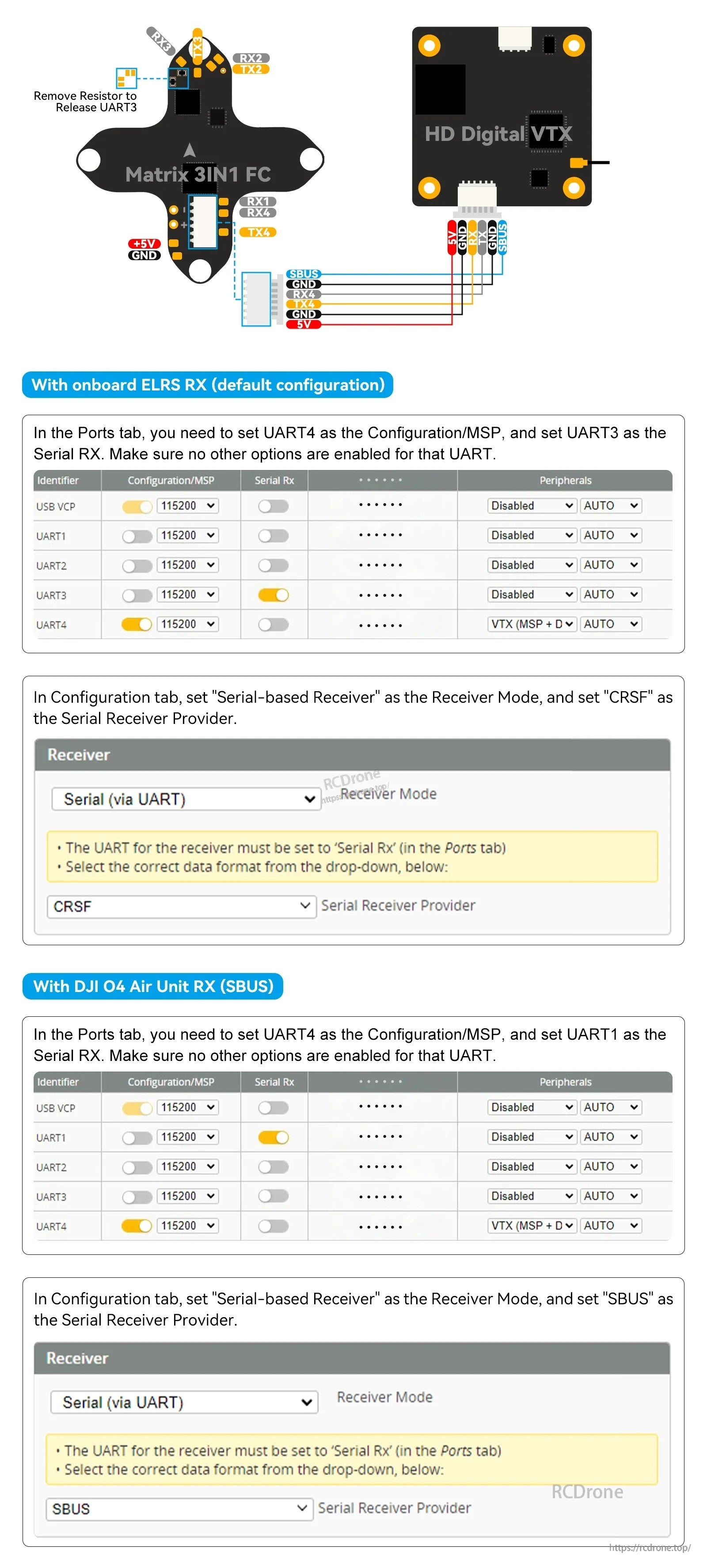
پیکربندی پورتهای Betaflight نشان داده شده (3IN1)
- با RX ELRS روی برد (پیشفرض): UART4 را به Configuration/MSP و UART3 را به Serial RX تنظیم کنید (هیچ گزینه دیگری برای UART3 فعال نیست). حالت گیرنده: گیرنده مبتنی بر سری؛ ارائهدهنده گیرنده سری: CRSF.
- با RX واحد هوایی DJI O4 (SBUS): UART4 را به Configuration/MSP و UART1 را به Serial RX تنظیم کنید (هیچ گزینه دیگری برای UART1 فعال نیست).حالت گیرنده: گیرنده مبتنی بر سری؛ ارائهدهنده گیرنده سری: SBUS.
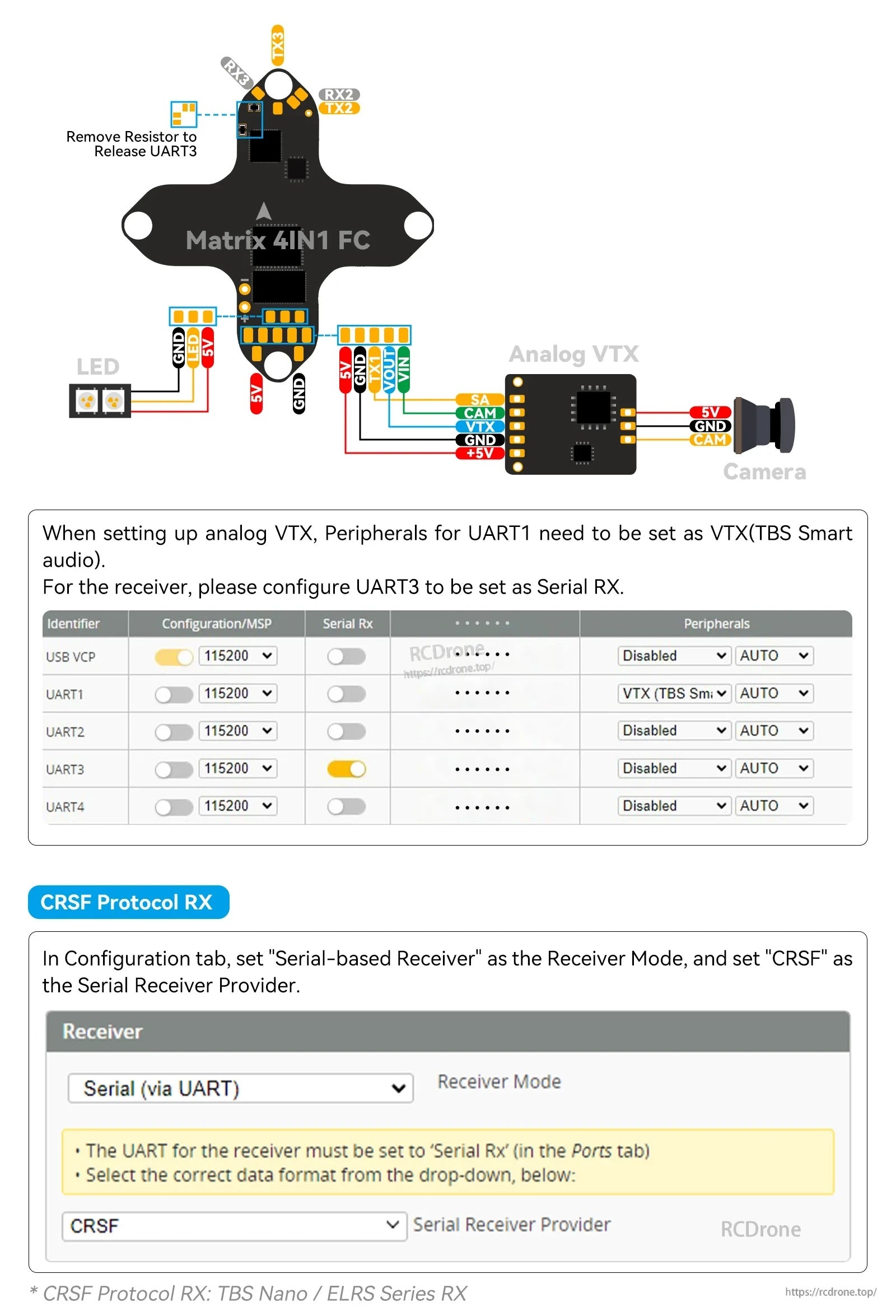
پیکربندی پورتهای Betaflight نشان داده شده (4IN1)
- هنگام تنظیم VTX آنالوگ: دستگاههای جانبی را برای UART1 به VTX (صوت هوشمند TBS) تنظیم کنید.
- برای گیرنده: UART3 را به عنوان RX سری پیکربندی کنید.
- یادداشت پروتکل CRSF RX نشان داده شده: TBS Nano / سری ELRS RX.
فریمور
- فریمور FC (3IN1): Betaflight_4.5.1_BETAFPVG473
- فریمور FC (4IN1): Betaflight_4.5.2_BETAFPVG473_V2
- پایه فریمور ESC (BB51 Bluejay): A_X_5_96_v0.19.2.hex (پشتیبانی از DSHOT300/DSHOT600؛ گزینههای فرکانس PWM ثابت 24KHz/48KHz/96KHz و ملودیهای شروع سفارشی را ذکر میکند)
مهم: از تاریخ 5 ژانویه 2026، FC 3IN1 قرار است با ژیروسکوپ BMI270 ارسال شود. نسخه ژیروسکوپ را قبل از فلش کردن فریمور تأیید کنید. Matrix 1S 3IN1 و 4IN1 به فریمورهای متفاوتی نیاز دارند.
توجه: از فلش کردن فریمور ESC با فاصله زمانی کوتاه خودداری کنید؛ گفته شده است که این ممکن است شانس توقف و آسیب به کنترلر پرواز را افزایش دهد.
راهنماها & دانلودها
- فریمور 3IN1 + CLI dump: https://support.betafpv.com/hc/en-us/articles/41037090524697-Firmware-for-Matrix-1S-Brushless-Flight-Controller-3IN1-HD
- فریمور 4IN1 + CLI dump: https://support.betafpv.com/hc/en-us/articles/48215862783769-Firmware-for-Matrix-1S-Brushless-Flight-Controller-4IN1
- یادداشتهای انتشار Betaflight 4.5.1: https://github.com/betaflight/betaflight/releases/tag/4.5.1
- یادداشتهای انتشار Betaflight 4.5.2: https://github.com/betaflight/betaflight/releases/tag/4.5.2
- پروژه Bluejay: https://github.com/bird-sanctuary/bluejay
- انتشارات Bluejay: https://github.com/bird-sanctuary/bluejay/releases
- پیکربندی ESC: https://preview.esc-configurator.com/
- BLHeliSuite16714903: https://github.com/4712/BLHeliSuite/releases/tag/16714903
- راهنمای فلش کردن فریمور ELRS: https://support.betafpv.com/hc/en-us/articles/4404231679129-How-to-Flash-Firmware-of-ELRS-RX-TX
چه چیزی شامل میشود
بسته کنترلر پرواز بدون برس Matrix 1S (3IN1)
- 1 * کنترلر پرواز بدون برس Matrix 1S (3IN1)
- 1 * آداپتور Type-C به SH1.0
- 1 * کابل آداپتور SH1.0-4Pin
- 1 * کابل آداپتور SH1.0-6Pin
- 4 * M1.2*4 پیچ خودکار
- 4 * M1.4*5 پیچ خودکار
- 4 * توپهای جذب شوک
پکیج کنترلر پرواز بدون براش Matrix 1S (4IN1)
- 1 * کنترلر پرواز بدون براش Matrix 1S (4IN1)
- 1 * آداپتور Type-C به SH1.0
- 1 * کابل آداپتور SH1.0-4Pin
- 4 * M1.2*4 پیچ خودکار
- 4 * M1.4*5 پیچ خودکار
- 4 * توپهای جذب شوک
توجه
- این کنترلر برای تازهواردان و خلبانان تفریحی طراحی شده است و از یک برد 1 میلیمتری برای دوام استفاده میکند و نصب آن آسان است.
- کنترلرهای پرواز تحت پوشش نقصهای تولیدکننده هستند. مشکلات ناشی از خطاهای کاربر، آسیبهای ناشی از تصادف فیزیکی، آسیب در حین نصب یا جداسازی، تغییرات، نوسانات برق، آتشسوزیهای الکتریکی یا تماس با آب تحت پوشش نیستند.
برای سوالات مربوط به سازگاری (انتخاب 3IN1 در مقابل 4IN1، سیمکشی یا فریمور)، با پشتیبانی تماس بگیرید در https://rcdrone.top/ یا [email protected].
جزئیات

بین برد 3IN1 برای ساختهای دیجیتال HD و گزینه 4IN1 که پشتیبانی از Betaflight OSD و VTX آنالوگ را اضافه میکند، انتخاب کنید.


BEC بهروز شده 5V/3A به خاطر خروجی پایدار در ولتاژهای ورودی معمولی 1S شناخته میشود.

کانکتورهای بدون لحیمکاری نصبها را ساده میکنند، با یک پورت VTX دیجیتال HD اختصاصی و سرهای موتور قابل اتصال.

برای ساختهای آنالوگ، نسخه 4IN1 پدهای لحیمکاری را برای سیمکشی یک VTX آنالوگ خارجی فراهم میکند.

یادداشتهای راهاندازی شامل نقشهبرداری پورتهای رایج Betaflight برای ساختهای دیجیتال HD و گیرنده Serial ELRS روی برد است.
راهنمای پیکربندی بر روی سیمکشی VTX آنالوگ و تنظیمات CRSF برای گیرنده Serial ELRS روی برد تمرکز دارد.

لوازم جانبی شامل راهاندازی سریع و نصب روی میز، با یک آداپتور USB، کابل و سختافزار نصب است.

Related Collections





