









فلایوو GOKU H743 PRO 55A 32بیت 128K 30x30 FC + ESC استک، ۵۱۲MB بلکباکس، سازگار با Plug&Play O4/O4 Pro
فلایوو GOKU H743 PRO 55A 32بیت 128K 30x30 FC + ESC استک، ۵۱۲MB بلکباکس، سازگار با Plug&Play O4/O4 Pro
FLYWOO
در دسترس بودن پیکاپ بارگیری نشد
بررسی
پشته Flywoo GOKU H743 PRO 55A یک کنترلر پرواز و پشته ESC با ابعاد 30x30 است که برای ساختهای Plug&Play طراحی شده است و شامل یک کابل اتصال اختصاصی برای O4 / O4 Pro میباشد. این پشته از Betaflight، INAV و Ardupilot (APM) پشتیبانی میکند و یک FC مبتنی بر STM32H743 را با یک ESC 4in1 AM32 55A برای پروژههای چند روتوره ترکیب میکند.
ویژگیهای کلیدی
- میکروکنترلر STM32H743VIH6 (480MHz Cortex-M7)؛ معیارهای عملکرد لیست شده: فلش 2048KB، 2424 CoreMark
- ژیروسکوپ دوگانه: ICM42688P x2
- ثبتنام 512MB blackbox
- خروجیهای دوگانه BEC: 10V 3A و 5V 3A
- پشتیبانی از 7 پورت UART و خروجی PWM 12 کاناله؛ 8 خروجی موتور برای پشتیبانی از چند روتور X8
- پشتیبانی از دوربین دوگانه و سوئیچینگ دوربین دوگانه داخلی (PAL/NTSC)؛ عملکرد سوئیچینگ دوربین برای سیستمهای ویدئویی آنالوگ است
- کانکتورهای ESC دوگانه؛ رابطها برای VTX، GPS، گیرنده (RX)، زنگ
- ESC از AM32، Dshot300 و Dshot600 پشتیبانی میکند و فرکانس PWM 24k-128k را دارد
مشخصات
کنترلر پرواز GOKU H743 PRO
| هدف فریمور Betaflight | Flywoo H743PRO |
| هدف فریمور INAV | Flywoo H743PRO |
| هدف فریمور APM | Flywoo H743PRO |
| MCU | STM32H743VIH6 |
| هسته MCU / ساعت | Cortex-M7 / 480MHz |
| فلش | 2MB (2048KB) |
| ژیروسکوپ | ICM42688P x2 |
| OSD | AT7456E (LGA16) |
| بارومتر | DPS310 / SPL06 |
| بلک باکس | 512MB |
| UARTS | 1 / 2 / 3 / 4 / 6 / 7 / 8 |
| I2C | 2 |
| PWM | 12 |
| خروجیهای موتور | 8 (پشتیبانی از چند روتور X8) |
| ولتاژ ورودی | 7.4V-26V / 2-6S LiPo / LiHV |
| BEC | 10V 3A / 5V 3A |
| پشتیبانی دوربین | CAM1, CAM2 |
| اندازه کنترلر پرواز | 36.5mm x 36.5mm x 8.45mm (ارتفاع شامل پلاگین) |
| سوراخهای نصب | M3 30x30mm |
| وزن | 9.9g |
GOKU G55M AM32 4in1 ESC
| فریمور | AM32 (AT32DEVF421) |
| پروتکل | Dshot300, Dshot600 |
| فرکانس PWM | 24k-128k |
| ولتاژ ورودی | 3-6S LiPo |
| جریان مداوم | 55A |
| وزن | 15g |
پین اوت / پدهای برچسبگذاری شده (طبق نقشههای برد مشخص شده است)
- USB: VUSB, D-, D+, GND
- SPI: MISO, MOSI, SCK, CS1, CS2/SPI3
- CAN: CAN-H, CAN-L, GND (4.5V همچنین برچسبگذاری شده است)
- هوا، RSSI (+5V و GND برچسبگذاری شده است)
- برچسبهای دوربین/کنترل: CAM1، CAM2؛ کنترل USER2 PD11-CAM؛ کنترل USER1 PD10-10V
- سیگنالها/پدهای دیگر برچسبگذاری شده شامل: BZ-، LED، SUBS، S1-S4، S5-S8، S9-S12، RX1-RX8، TX2-TX8، CUR1، CUR2، SDA1/SCL1، SDA2/SCL2، BAT، GND، 10V، VTX، +5V، 4.5V
محتویات موجود
- 1 x کابل اتصال FC&کابل اتصال ESC
- 1 x کابل اتصال O4/O4 Pro
- 1 x کابل اتصال بوزر
- 1 x کابل اتصال گیرنده
- 1 x کابل اتصال GPS
- 2 x کابل اتصال دوربین
- 1 x کابل اتصال VTX آنالوگ
- 1 x کابل برق XT60
- 9 x توپ شوکگیر M3
- 5 x حلقه لاستیکی M3
- 1 x خازن
- 5 x میخ نایلونی
- 5 x مهره ضد لغزش
سوالات متداول
- آیا فریمور مخصوص Betaflight / APM / INAV وجود دارد؟ بله. نام فریمور Flywoo H743PRO است.
- آیا سازگاری فریمور محدود است؟ از فریمورهای متن باز شامل Betaflight، INAV و Ardupilot (APM) پشتیبانی میکند.
- چگونه ژیروسکوپهای دوگانه ثبات را افزایش میدهند؟ FAQ ارائه شده بیان میکند که ژیروسکوپهای دوگانه ICM-42688P از تأیید اضافی و جبران دما دینامیک استفاده میکنند که انحراف وضعیت را به ±0.03°/s کاهش میدهد.
- مدت زمان پشتیبانی ذخیرهسازی بلک باکس برای ضبط چقدر است؟ FAQ ارائه شده بیان میکند که 512MB میتواند تا 200 پرواز را ضبط کند که هر کدام 5 دقیقه یا بیشتر طول میکشد.
- آیا رابطهای دوربین دوگانه با فرستندههای ویدیویی اصلی سازگار هستند؟ رابطهای CAM فقط از سیستمهای انتقال ویدیوی آنالوگ یا ماژولهای دوربین با فرمتهای PAL/NTSC پشتیبانی میکنند.
پشتیبانی
برای سوالات مربوط به سیمکشی، انتخاب هدف نرمافزار، یا ادغام ساخت، با [email protected] or تماس بگیرید https://rcdrone.top/.
جزئیات

پشته Flywoo GOKU H743 Pro 55A یک کنترلر پرواز H743 را با USB-C و چندین پورت پلاگین برای سیمکشی تمیز و منظم ترکیب میکند.

کنترلر پرواز GOKU H743 PRO از MCU STM32H743 با دو ژیروسکوپ استفاده میکند و از خروجیهای PWM تا 12 کاناله برای ساختهای انعطافپذیر پشتیبانی میکند.
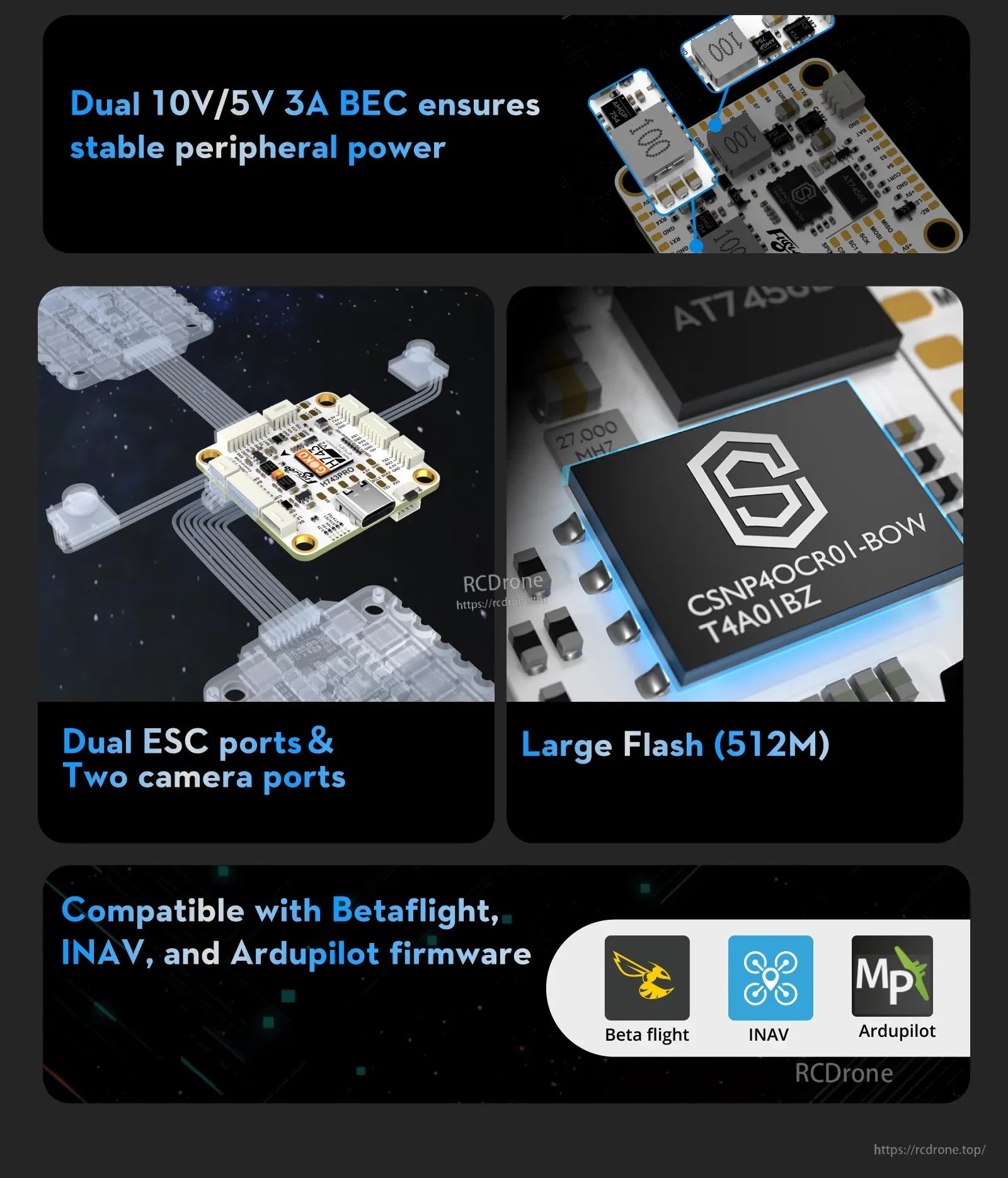
کنترلر پرواز GOKU H743 Pro شامل منبع تغذیه دوگانه 10V/5V 3A BEC، کانکتورهای ESC دوگانه، دو پورت دوربین و 512M فلش داخلی برای ثبت اطلاعات است.

کنترلر پرواز GOKU H743 PRO از MCU STM32H743VIH6 با 512MB فلش و دو ژیروسکوپ ICM42688P استفاده میکند.

پشته GOKU H743 PRO شامل 512MB حافظه بلک باکس، ورودی 7.4–26V (2–6S)، 10V/5V 3A BEC و نصب M3 30x30mm است.

ESC 4 در 1 GOKU G55M AM32 از ورودی LiPo 3–6S، DShot300/600 و 55A جریان مداوم در یک ساخت 15 گرمی پشتیبانی میکند.

پشته GOKU H743 V2 از پردازنده Cortex-M7 با فرکانس 480MHz STM32H743 و 2048KB فلش برای پردازش سریع کنترل پرواز استفاده میکند.

ژیروسکوپهای دوگانه ICM42688P از دو سنسور مستقل برای جبران متقابل استفاده میکنند تا محاسبات پایدار کنترلکننده پرواز را پشتیبانی کنند.

پشته GOKU H743 PRO از کانکتورهای پلاگین برچسبگذاری شده برای سیمکشی DJI O4، GPS، گیرنده، VTX، دوربین، ESC و بوق استفاده میکند.
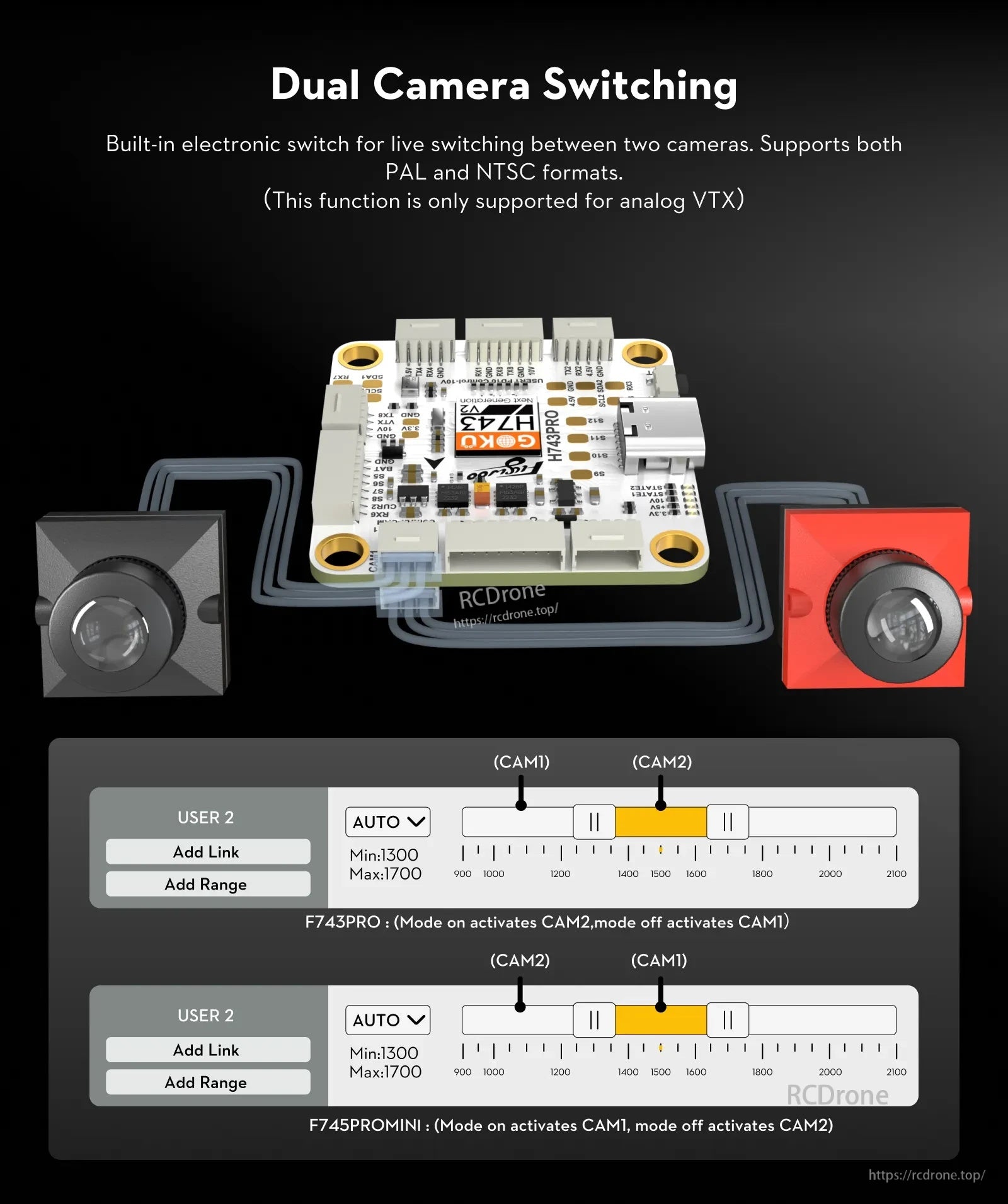
GOKU H743 PRO شامل یک سوئیچ الکترونیکی داخلی برای سوئیچ زنده بین دو دوربین آنالوگ FPV با پشتیبانی از PAL/NTSC است.

پشته Flywoo GOKU H743 Pro شامل یک BEC قابل سوئیچ 10V است که میتوان آن را از طریق یک کانال حالت روشن یا خاموش کرد.

Flywoo H743PRO از گزینههای فریمور متنباز شامل Betaflight، INAV و Ardupilot برای تنظیمات انعطافپذیر پشتیبانی میکند.

پشته GOKU H743 Pro از پلاگهای بهوضوح برچسبگذاری شده برای سیمکشی سریع به DJI O4/O4 Pro، دوربین، گیرنده، GPS/قطبنما و منبع تغذیه استفاده میکند.

کنترلر پرواز GOKU H743 دارای پدهای قدرت/سیگنال CAM2 با برچسبهای واضح و یک پین اوت USB اختصاصی برای سیمکشی آسان است.

پدهای با برچسب واضح برای UART RX/TX، CAM/VTX، LED/buzzer و ریلهای قدرت ۴.۵V/۵V/۱۰V به سادهسازی سیمکشی و راهاندازی در استک GOKU H743 PRO کمک میکند.









