







Drone Penyelidikan Saintifik P600 Drone - ROS AI Eksperimen Pengaturcaraan Menengah Platform Pembangunan Industri Studio Lab Drone Kit DIY
Drone Penyelidikan Saintifik P600 Drone - ROS AI Eksperimen Pengaturcaraan Menengah Platform Pembangunan Industri Studio Lab Drone Kit DIY
RCDrone
Tidak dapat memuatkan ketersediaan pengambilan
Gambaran keseluruhan
The Dron Penyelidikan Saintifik P600 ialah platform canggih yang direka untuk penyelidikan saintifik, pembangunan industri dan eksperimen AI. Dilengkapi dengan prestasi tinggi Modul pengkomputeran NVIDIA Jetson Orin NX, ia menyampaikan 100 TOPS kuasa pengkomputeran, menjadikannya sesuai untuk aplikasi AI lanjutan. Drone ini mempunyai ciri a zum optik 40x kamera gimbal untuk pengimejan resolusi tinggi, 3D LiDAR SLAM untuk pemetaan yang tepat, dan Kedudukan RTK untuk ketepatan aras sentimeter. Ianya perisian Prometheus V2 bersepadu dan Perpustakaan penglihatan SpireCV menyokong pengaturcaraan sekunder, menjadikannya alat serba boleh untuk pembangun. Dengan masa penerbangan sehingga 21 minit, a paksi pepenjuru 600 mm, dan teguh Berat lepas landas 4.05 kg, P600 dioptimumkan untuk persekitaran penyelidikan dan pembangunan yang dinamik.
Spesifikasi
kapal terbang
| Atribut | Butiran |
|---|---|
| Jenis Pesawat | Quadcopter |
| Berat Berlepas | lebih kurang 4.05 kg (termasuk bateri) |
| Jarak Paksi Diagonal | 600 mm |
| Dimensi | Panjang 469 mm, Lebar 469 mm, Tinggi 400 mm |
| Masa Tuding Maksimum | lebih kurang 21 min |
| Ketepatan Melayang | RTK: ±0.015 m (mendatar), ±0.01 m (menegak) SLAM LiDAR 3D: ±0.2 m (mendatar), ±0.1 m (menegak) |
| Suhu Operasi | 6°C ~ 40°C |
| Cip MCU Utama | STM32H743VIT6 / 216 MHz / storan program 2M / storan data 512 KB |
| IMU | ICM20689 |
| Barometer | BMP388 |
| MTD | AT24C64 |
| Antara Muka I/O | PX4IO-V2 terbina dalam, menyokong 8Antara muka PWM, 1Antara muka RC (menyokong SBus, PPM, DSM) Antara Muka Luaran: 3UART (GH1.25 6-pin), 1CAN (GH1.25 4-pin), Antara Muka USB Kawalan Penerbangan (Jenis-C) |
Komputer Onboard
| Atribut | Butiran |
|---|---|
| Nama | Komputer Onboard Allspark-Orin NX |
| Model | IA160_V1 |
| Berat badan | lebih kurang 188 g |
| Dimensi | 102.5 mm × 62.5 mm × 31 mm (termasuk kipas) |
| Pemproses | NVIDIA Jetson Orin NX |
| Ingatan | 16 GB LPDDR5 |
| Kuasa Pengkomputeran | 100 TOP |
| GPU | 32 Teras Tensor Bersepadu bagi GPU seni bina NVIDIA Ampere 1024-teras |
| CPU | 8-teras Arm® Cortex®-A78AE v8.2 CPU 64-bit (2MB L2 + 4MB L3) |
| SSD | 128 GB (M.2 antara muka, boleh dikembangkan) |
| Ethernet | 100 Mbps x2 (1 port Ethernet khusus, 1 boleh ditukar) |
| WiFi | 5G |
| Paparan | HDMI Mikro (1920*1080P) |
| Port USB | USB2.0: Jenis-A x1, Jenis-C x1 USB2.0: OTG x1 |
| Bekalan Kuasa | 10~26V @ 3A |
Bateri Kuasa
| Atribut | Butiran |
|---|---|
| Model | LPB610HV |
| Kapasiti | 10000 mAh |
| Berat Bateri | 1.2 kg |
| Voltan Kendalian | 22V~26.1V |
| Voltan Simpanan | 23.1V |
| Dimensi | Panjang 180 mm, Lebar 90 mm, Tinggi 63 mm |
Alat Kawalan Jauh
| Atribut | Butiran |
|---|---|
| Model | H16 |
| Saluran | 16 |
| Kekerapan | 2.400~2.483 GHz |
| Voltan Kendalian | 4.2V |
| Bateri | 20000 mAh |
| Port Pengecasan | Jenis-C 9V-2A |
| Berat badan | 1034 g |
| Dimensi | Panjang 272 mm, Lebar 183 mm, Tinggi 94 mm |
Pautan Komunikasi
| Atribut | Butiran |
|---|---|
| Model | R16 |
| Jarak Komunikasi | lebih kurang 600 meter, lebar jalur 3.5 Mbps |
| Voltan Kendalian | 7.2V~72V |
| Antara muka | 2UART, 1Ethernet, 1HDMI, 1Jenis-C |
| Dimensi | Panjang 76 mm, Lebar 69 mm, Tinggi 11 mm |
Kamera Gimbal
| Atribut | Butiran |
|---|---|
| Model | GX40 |
| Dimensi Gimbal | Panjang 85.8 mm, Lebar 86 mm, Tinggi 129.3 mm |
| Dimensi GCU | Panjang 45.4 mm, Lebar 40 mm, Tinggi 13.5 mm |
| Berat Gimbal | 405 g |
| Berat GCU | 18.6 g |
| Voltan Kendalian | 14V~53V |
| Protokol Penstriman | RTSP (lalai) |
| Format Pengekodan | H.264 / H.264H / H.264B / H.265 / MJPEG |
| Resolusi | - 4K30fps - 1080P@30fps - SCGA (12801024)@30fps <br> - 1.3M (1280960)@30fps - 720P@30fps |
| Kadar bit | [email protected], [email protected] |
Lensa
| Atribut | Butiran |
|---|---|
| taip | Kanta zum optik |
| Panjang Fokus | 4.8~48 mm |
| Apertur (F/NO) | f1.7~f3.2 |
| FOV pepenjuru (D) | 67.2°~7.6° |
| FOV Menegak (V) | 36.1°~3.7° |
| FOV Mendatar (H) | 60.2°~6.6° |
| Nisbah Zum Optik | 10x |
Penderia Imej
| Atribut | Butiran |
|---|---|
| Jenis Sensor | CMOS |
| Piksel Berkesan | 8.29J |
| Saiz Sensor | 1/2.8'' |
| Saiz Piksel | 1.45×1.45 (μm) |
| Kelajuan Pengatup Elektronik | 1~1/30000s |
Penerang
| Atribut | Butiran |
|---|---|
| taip | Laser |
| Panjang gelombang | 850±10 nm |
| kuasa | 0.8W |
| Jarak Pencahayaan | ≤200 m |
RTK
| Atribut | Butiran |
|---|---|
| Model | M15-RTK |
| Berat badan | 90 g |
| Dimensi | Panjang 80 mm, Lebar 50 mm, Tinggi 20 mm |
| Jenis Satelit yang Disokong | BDS/GPS/GLONASS/QZSS |
| Bekalan Kuasa | 9~36V (12V disyorkan) |
| Penyambung Antena | SMA-F |
| Pelabuhan Berfungsi | UARTx2, CANx1, USB2.0x1 |
Pengecas
| Atribut | Butiran |
|---|---|
| Model | C1-XR |
| Voltan Masukan AC | 100~240V |
| Voltan Masukan DC | 11~18V |
| Dimensi | Panjang 130 mm, Lebar 115 mm, Tinggi 61 mm |
| Berat badan | 380 g |
| Mengecas Arus | 0.1A~10A |
| Sel Bateri yang Disokong | 1~6 sel |
LiDAR 3D
| Atribut | Butiran |
|---|---|
| Model | MID360 |
| Panjang Gelombang Laser | 905 nm |
| Julat Pengesanan | 40 m (pada 105% pemantulan) |
| Medan Pandangan (FOV) | Mendatar: 360°, Menegak: -7°~52° |
| Julat Minimum | 0.1 m |
| Kadar Awan Titik | 10 Hz (biasa) |
| Mata sesaat | 200,000 mata/s |
| Antaramuka Data | 100 BASE-TX Ethernet |
| Penyegerakan Data | IEEE 1588-2008 (PTP v2), GPS |
| IMU dalaman | ICM40609 |
| Bekalan Kuasa | 7~27V |
| Dimensi | 65 mm (W) x 65 mm (D) x 60 mm (H) |
| Berat badan | 115 g |
| Suhu Operasi | -20°C ~ 55°C |
Parameter Perisian
Komputer Onboard
| Atribut | Butiran |
|---|---|
| Model | Jetson Orin NX |
| Sistem Operasi | Ubuntu 20.04 |
| Nama pengguna | amov |
| Kata laluan | amov |
| Versi L4T | 35.2.1 |
| Versi Jetpack | 5.1 |
| Versi CUDA | 11.4.315 |
| SDK Realsense | 2.50.0 |
| Versi ROS | noetic |
| Versi OpenCV | 4.7.0 |
| Realsense ROS | 2.3.2 |
Senarai Pakej
| Nama | Spesifikasi/Model | Kuantiti/Unit |
|---|---|---|
| Pesawat Utama P600 | P600-Allpark2-RTK-GX40-S3 | 1 set |
| Terminal Tanah M15-RTK | M15-RTK | 1 keping |
| Antena Cendawan GNSS | Antena cendawan | 1 keping |
| Kabel Sambungan Antena GNSS | Kabel Sambungan Antena | 1 kabel |
| Alat Kawalan Jauh H16 | H16 | 1 unit |
| Bateri Kuasa 6S 10000mAh | 6S 10000mAh | 1 set |
| Bateri Litium 3S 4000mAh | 3S 4000mAh | 1 set |
| Pengecas Pengimbangan Pintar | C1-XR | 1 unit |
| Kabel Rangkaian | 1.5 m | 1 kabel |
| Tali Keselamatan | 50 m | 1 pakej |
| Pendakap HDMI | / | 1 keping |
| Kabel Penyesuai HDMI | / | 1 keping |
| Konfigurasi Komputer | / | 1 keping |
| Plat Jatuh 2D | 35×35 sm | 1 keping |
| Kes Penerbangan | 740×540×510 mm | 1 set |
| Pek Kabel Aksesori | / | 1 pakej |
| Sijil | / | 1 helaian |
| Senarai Semak Ujian Fungsi | / | 1 helaian |
Butiran
Platform Pembangunan Dron Penyelidikan Saintifik Prometheus 600
The Platform Pembangunan Dron Penyelidikan Saintifik Prometheus 600 (dirujuk sebagai P600) ialah produk generasi keempat dalam siri P600. Ia mengintegrasikan secara mendalam dua teknologi teras, Prometheus dan SpireCV, dan dilengkapi dengan kamera gimbal zum optik 40x. Persediaan ini membolehkan pengesanan dan penjejakan sasaran jarak jauh, pendaratan autonomi dari altitud tinggi dan misi pelayaran udara.
Sistem ini menyokong 3D LiDAR SLAM dengan Cepat-lio, mencapai pemetaan SLAM 3D berketepatan tinggi. Selain itu, ia menampilkan Algoritma kerjasama pelbagai ejen EGO-Swarm, membenarkan aplikasi dalam pelbagai senario seperti pembinaan semula ruang 3D dalaman dan luaran dan pengelakan halangan semasa navigasi dron.
Keupayaan lanjutan ini dilengkapi dengan Stesen tanah profesional Prometheus, yang menyediakan maklum balas visual masa nyata, pemantauan operasi dan pelarasan parameter dinamik, menjadikannya lebih mudah bagi pembangun untuk menguasai dan mempercepatkan pembangunan sekunder.

Tiga Versi Drone P600

Kawalan Fleksibel bagi Gimbal Optik-Elektronik
Kamera gimbal GX40 menyokong kawalan berbilang senario dan menyepadukan kawalan jauh berasaskan rantai untuk membolehkan carian sasaran semasa navigasi titik laluan. Menggunakan Perpustakaan penglihatan SpireCV, ia memudahkan pengesanan dan pengesanan sasaran, mencapai penguncian masa nyata gimbal pada sasaran.
- Penerangan Malam
- Pengesanan dan Penjejakan Sasaran

Klik Sasaran dan Penjejakan
Menggunakan Algoritma pengesanan YOLOv5 dan memanfaatkan set data universal COCO, sasaran dikesan dan dijejaki. The Algoritma penjejakan nanotrack mengunci sasaran yang dipilih untuk penjejakan. Tanpa perubahan keadaan, sasaran sehingga 30 meter jauhnya boleh dikenal pasti dan dijejaki. Melalui 40x zum optik dan zum elektronik, pengesanan dan pengesanan sasaran jarak jauh dicapai. Semasa pengesanan dron, Stesen tanah profesional Prometheus membenarkan suis penjejakan sasaran berasaskan jarak dinamik (lalai ialah 10 meter).
- Mengesan pada 30m
- Mengesan pada 20m
- Mengesan pada 10m

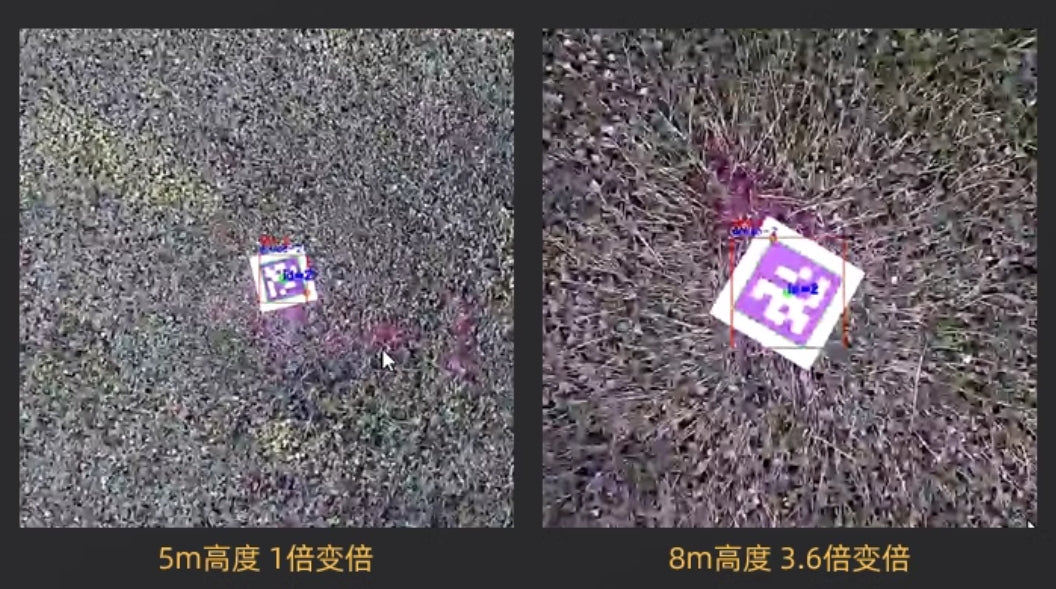
Pendaratan Berpandu Kod QR
Menggunakan Perpustakaan penglihatan SpireCV, pengesanan tepat dan anggaran kedudukan kod QR dicapai. GX40 boleh melakukan pendaratan berpandukan ketepatan pada kod QR dari ketinggian yang berbeza. Bahagian tengah kamera gimbal dijajarkan dengan bahagian tengah kod QR dalam margin ralat 30 cm.
- Ketinggian 5m, 1x Zum
- Ketinggian 8m, Zum 3.6x
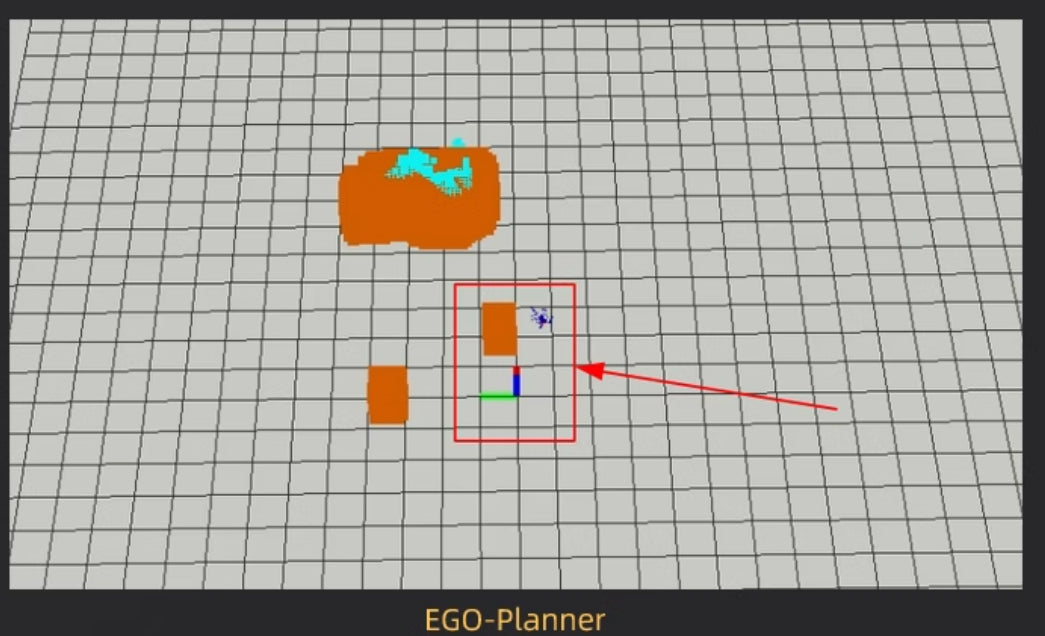
EGO-Perancang
Menyokong Algoritma perancangan laluan EGO-Planner dan menyediakan Algoritma pemetaan Octomap. Digabungkan dengan stesen tanah profesional, ia membolehkan perancangan laluan dinamik 3D autonomi.
Aplikasi Kawalan Dron yang Stabil dan Boleh Dipercayai
Drone P600 dilengkapi dengan peralatan RTK berketepatan tinggi, mencapai ketepatan tinggi melayang di luar rumah dengan ketepatan mendatar sehingga 1 cm dan ketepatan menegak sehingga 1.5 cm. Digabungkan dengan Modul kawalan sistem perisian Prometheus, ia membolehkan kawalan dron yang tepat.
Modul kawalan dron bertindak sebagai "jambatan" antara program perisian dan dron, menyediakan berbilang keadaan kawalan seperti kedudukan awal melayang, kedudukan semasa melayang, mendarat dan pergerakan. Ini termasuk enam mod kawalan: kedudukan sistem kebiasaan, kelajuan, kawalan bersepadu kedudukan dan kelajuan, dan mod kawalan trajektori. Secara keseluruhan, ia menawarkan tujuh mod kawalan.

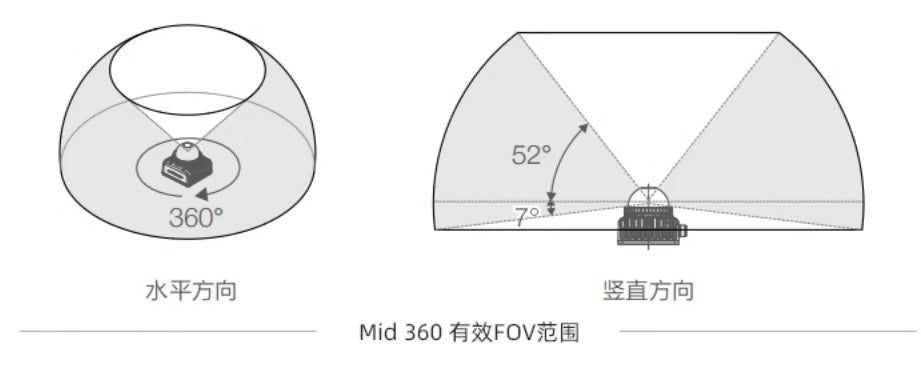
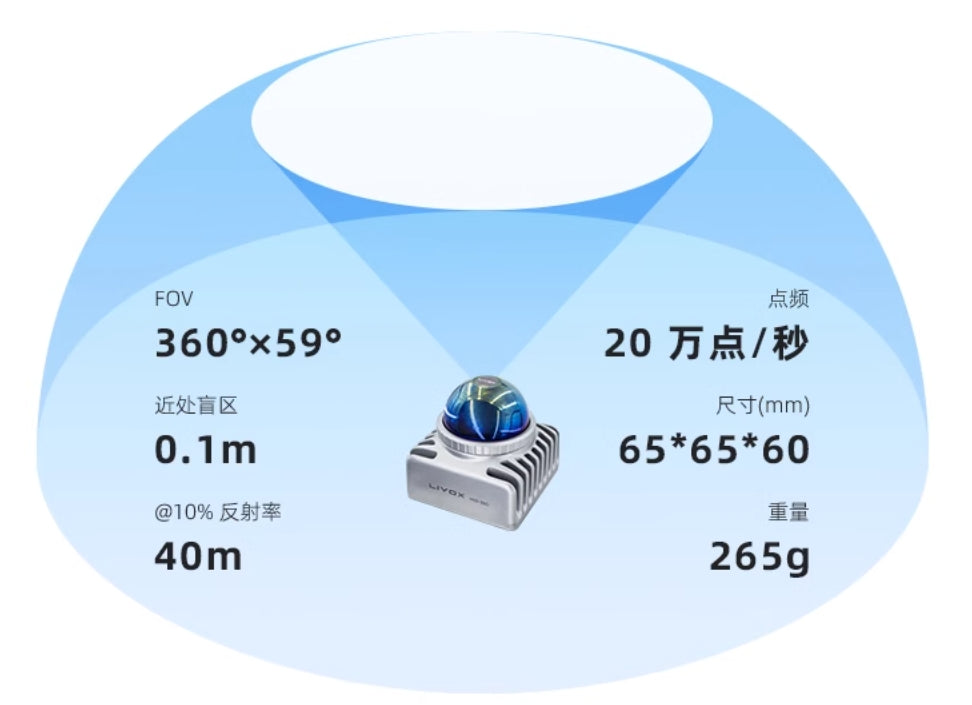
LiDAR 3D Mid-360
- Zon Buta Rendah | Medan Pandangan Luas | Aplikasi Pelbagai Senario
The Pertengahan 360 ciri-ciri a FOV mendatar 360° dan a FOV menegak maksimum 59°. Apabila pemantulan objek sasaran ialah 10%, julat pengesanan maksimum boleh dicapai 40 meter, dan julat zon buta adalah sekecil 10 meter. Ia menyesuaikan diri dengan pelbagai persekitaran yang kompleks seperti cahaya malap dan cahaya kuat.
Dilengkapi dengan modul Mid-360, yang Drone P600 mencapai liputan panoramik zon buta, memastikan operasi lancar untuk dron merentasi persekitaran berbilang senario.
- Penerangan Rajah:
- Arah Mendatar: 360°
- Arah Menegak: FOV maksimum 52°

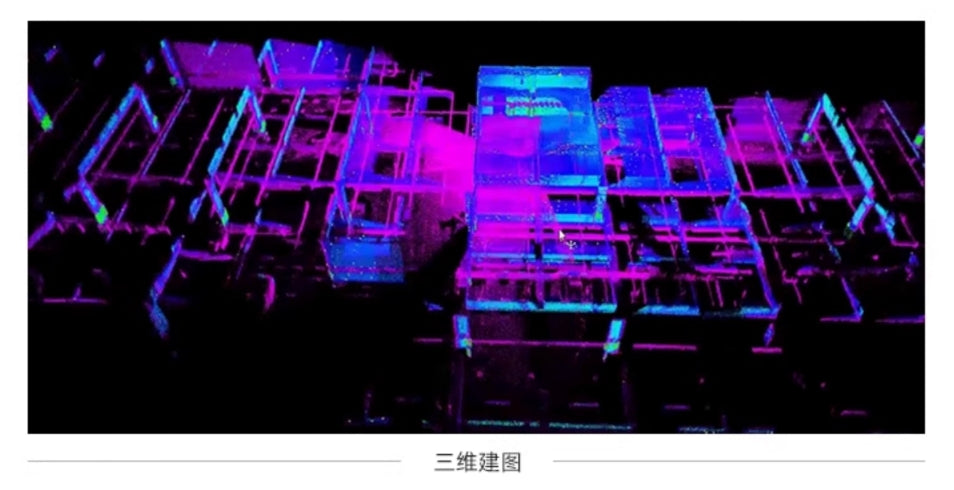
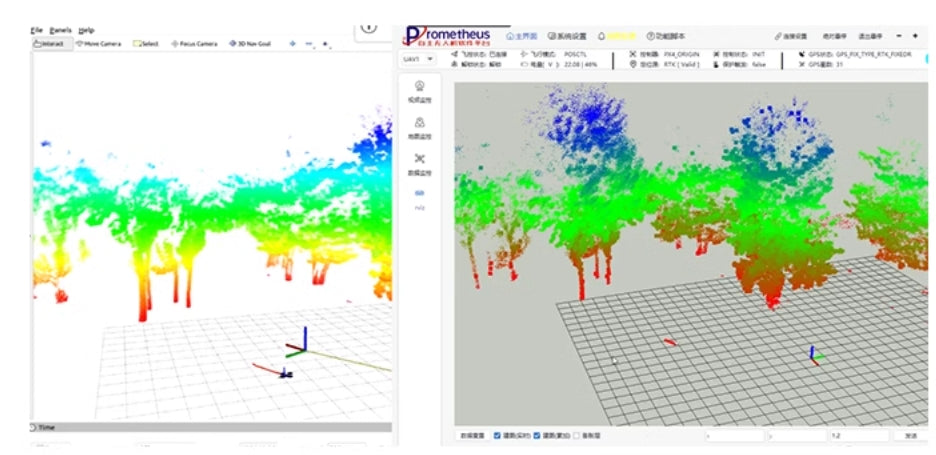
Pemetaan Alam Sekitar 3D yang Pantas dan Tepat
The Drone P600 dilengkapi dengan keupayaan penderiaan alam sekitar yang canggih, membolehkannya mengumpul data persekitaran sekitar dengan pantas semasa penerbangan. Data ini diproses dalam masa nyata untuk menjana a Peta alam sekitar 3D, memberikan kesedaran spatial yang tepat dan sokongan navigasi untuk pelbagai tugas.
Perancangan Laluan EGO-Swarm untuk Navigasi dan Pengelakan Halangan
The Pertengahan360 menerbitkan data awan titik dan data lokasi, digabungkan dengan Algoritma perancangan laluan EGO-Swarm, dengan ketara meningkatkan keupayaan dron untuk menyesuaikan diri secara autonomi kepada perubahan persekitaran yang dinamik. Ia boleh menganalisis dan bertindak balas dalam masa nyata kepada halangan semasa pergerakan dan melaraskan sasaran pengesanan secara dinamik dengan kelajuan maksimum 2 m/s. Ini memastikan fleksibiliti dan kebolehsuaian yang luar biasa dalam senario operasi yang tidak diketahui dan kompleks.
Ciri ini sangat meningkatkan kecekapan tugas dron, membolehkannya menyelesaikan pelbagai tugas dengan cekap dan tepat
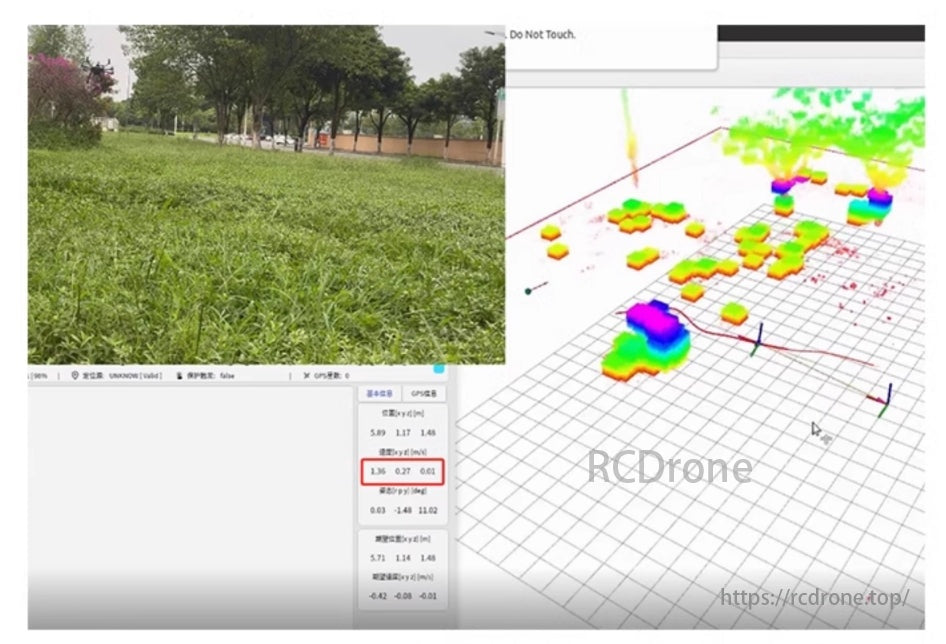
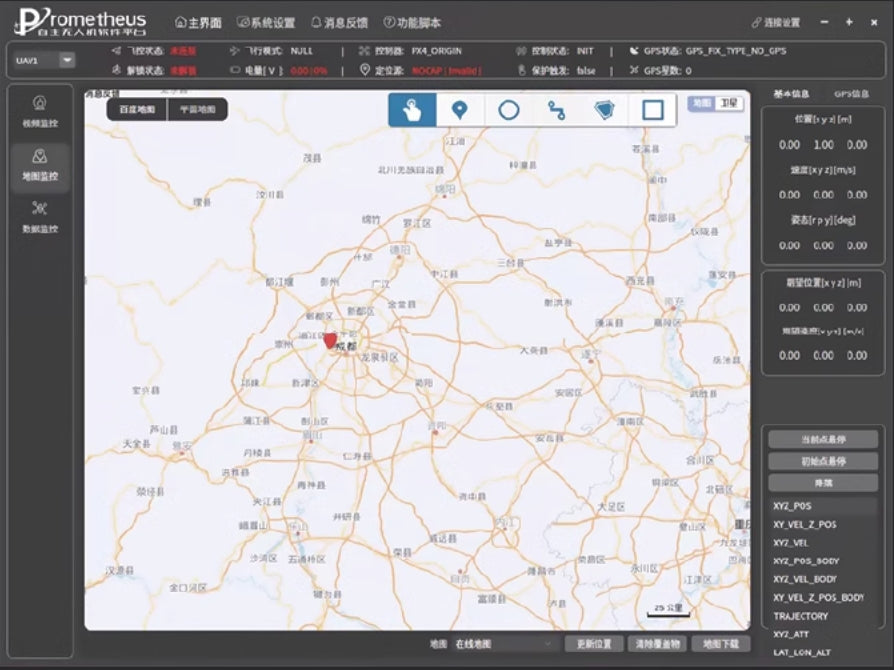
Interaksi Dron Stesen Tanah Profesional Prometheus
- Interaksi Stesen Tanah
Ini mempamerkan antara muka dan keupayaan interaksi Stesen tanah profesional Prometheus, membolehkan komunikasi dan operasi lancar dengan dron melalui pemetaan alam sekitar 3D.
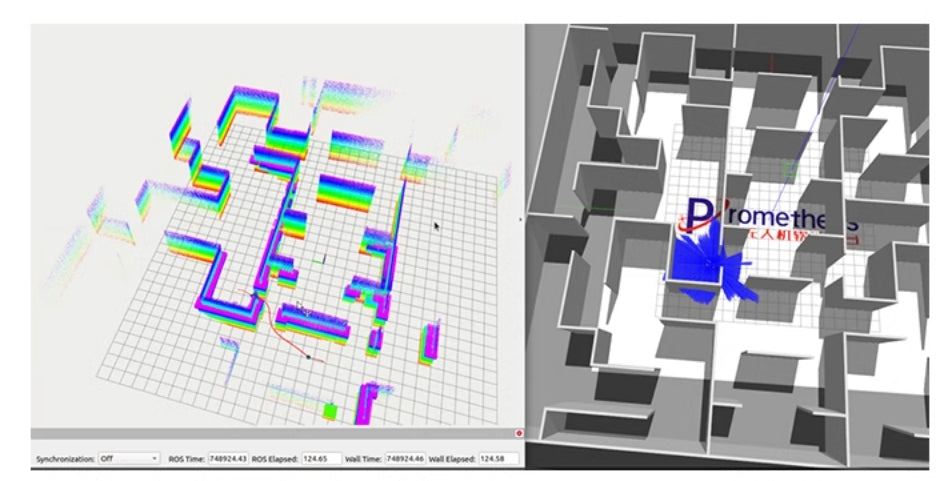
Demo Fungsi Simulasi Bersepadu
- Simulasi 3D LiDAR SLAM dan Perancangan Laluan EGO-Swarm
Ini menggambarkan simulasi bagi 3D LiDAR SLAM dan Perancangan laluan EGO-Swarm dalam persekitaran berstruktur, mempamerkan keupayaan sistem dalam demo terkawal.
Ciri Perkakasan
Bingkai Dron
The Kedway DP1000 platform dron gred industri menggunakan a FOC (Kawalan Berorientasikan Medan) sistem kuasa, membolehkan motor berputar dengan stabil, dengan bunyi yang rendah, kecekapan tinggi dan tindak balas dinamik yang pantas. Keseluruhan sistem dron mencapai keadaan "sedia untuk terbang" dengan kualiti perkakasan yang sangat baik, memastikan prestasi penerbangan yang stabil. Ia menyokong ketahanan ultra-panjang (70 minit tanpa muatan), manakala Drone P600 memerlukan lebih kurang 24 minit untuk penstabilan semasa kedudukan.

Unit Pengkomputeran Berkuasa
- Unit Pengkomputeran Micro Edge Allspark, dilengkapi dengan Modul NVIDIA Orin NX, menyediakan 100 TOPS kuasa pengkomputeran titik terapung.
- Saiz padat, ringan, keserasian sistem yang kukuh, dan Pengkomputeran berprestasi tinggi dipercepatkan GPU.
- Diprapasang dengan semua persekitaran pembangunan, sedia untuk digunakan, meningkatkan kecekapan pembangunan sekunder.
- Dimensi: 102.5 mm × 62.5 mm × 31 mm

Pengawal Penghantaran Imej Bersepadu
An alat kawalan jauh dron gred industri menggabungkan data, imej dan kawalan dalam satu.
- Jalur Kekerapan: 2.4-2.483 GHz
- Jarak Penghantaran Maksimum: 30 km
- Kualiti Imej: 1080P
- Hayat Bateri: 8-15 jam operasi berterusan
Semasa operasi dron, pengguna boleh memantau maklumat dron masa nyata, melihat rakaman kamera, dan serentak mengawal dron dengan kayu bedik, memastikan operasi penerbangan divisualisasikan sepenuhnya.

RTK Ketepatan Tinggi Dwi Antena
Drone itu dilengkapi dengan Modul penentududukan RTK-GNSS, yang menggunakan teknologi penentududukan pembezaan fasa pembawa pantas dan algoritma penindasan berbilang laluan untuk menyediakan ketepatan kedudukan peringkat sentimeter untuk dron. Ia boleh menerima data RTCM secara serentak daripada berbilang stesen rujukan berasaskan darat, menyokong pengiraan RTK garis dasar pendek, sederhana dan panjang.
Dengan terbina dalam berbilang bahasa GUI Web, ia membolehkan konfigurasi ambang sifar dan proses paparan dan naik taraf data yang divisualisasikan. Penerima juga mempunyai antara muka konfigurasi halaman web yang mesra pengguna, dengan ketara merendahkan halangan operasi. Ia menawarkan antara muka yang kaya dan boleh disesuaikan dengan pelbagai senario aplikasi, memberikan prestasi luar biasa dalam kedudukan yang tepat.

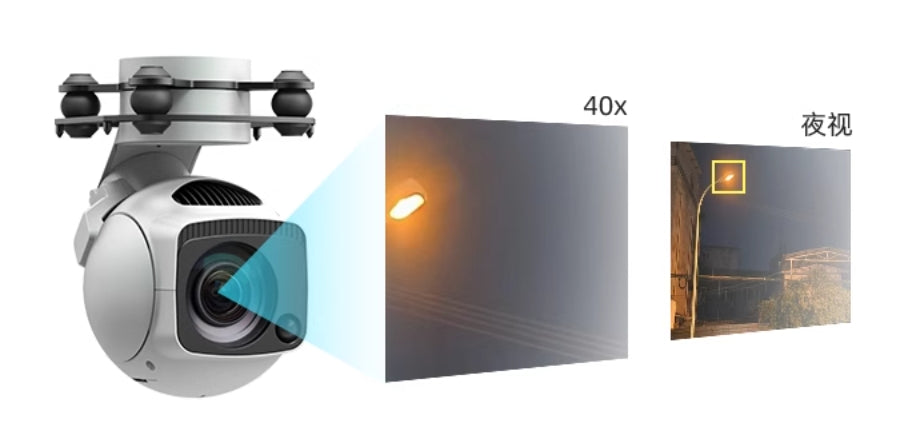
40x Gimbal Optik-Elektronik
Dilengkapi dengan gimbal bukan ortogonal 3 paksi berketepatan tinggi, ia menampilkan kamera zum optik 8.29 megapiksel 10x digabungkan dengan teknologi zum digital, mencapai pembesaran sehingga 40x. Ia boleh mengeluarkan 4K@30FPS video mengalir melalui rangkaian. Selain itu, ia dilengkapi dengan modul pencahayaan laser, membolehkan imej yang jelas walaupun dalam persekitaran yang benar-benar gelap.
MID 360 3D LiDAR
Mid-360 ialah pengesanan laser dan penderia jarak yang menjimatkan kos, selamat dan boleh dipercayai. Ia digunakan secara meluas dalam bidang seperti robot logistik, robot perindustrian, dan bandar pintar, fungsi sokongan seperti pemetaan, kedudukan, pengenalan dan pengelakan halangan. Mid-360 boleh mengesan objek sedekat 0.1 meter dan sejauh 100 meter. Ia menampilkan saiz padat, bidang pandangan yang luas, resolusi tinggi, kebolehpercayaan yang tinggi dan IMU bersepadu.
Spesifikasi:
- FOV: 360° × 59°
- Jarak Pengesanan Minimum: 0.1 m
- Julat (@10% Reflektif): 40 m
- Kekerapan Titik: 200,000 mata/saat
- Dimensi (mm): 65 × 65 × 60
- Berat badan: 265 g
Ciri-ciri Perisian
Sistem Perisian Prometheus V2
Platform pembangunan adalah berdasarkan ROS dan rangka kerja sumber terbuka Prometheus, menawarkan fungsi yang kaya dan sebilangan besar antara muka pembangunan sekunder untuk penyesuaian yang cekap. Ia menyediakan antara muka untuk keadaan UAV dan data sensor, termasuk maklumat lokasi, mod penerbangan, status bateri dan IMU. Selain itu, ia menawarkan antara muka kawalan untuk kedudukan, kelajuan, pecutan dan sikap, serta program contoh untuk penggunaan antara muka pembangunan. UAV juga termasuk fungsi pemeriksaan keselamatan penerbangan terbina dalam (bukan mengelakkan halangan), membolehkan pendaratan automatik dalam situasi tidak normal untuk mengurangkan risiko kemalangan, menjadikan pembangunan lebih selamat.

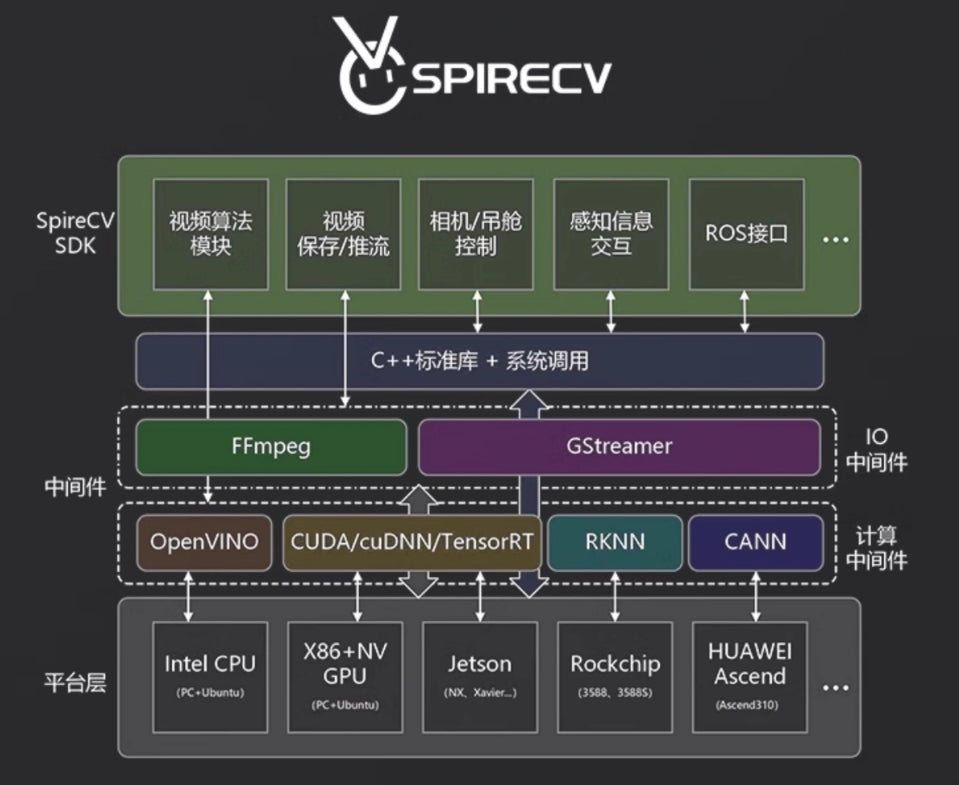
Perpustakaan Visi SpireCV
Berdasarkan pustaka penglihatan SpireCV, ini ialah SDK pemprosesan masa nyata imej onboard yang direka khusus untuk sistem tanpa pemandu pintar. Ciri utamanya termasuk kawalan gimbal/kamera, storan video, penstriman, pengesanan sasaran, pengecaman dan penjejakan. Ia bertujuan untuk menyediakan pembangun sistem tanpa pemandu pintar dengan keupayaan pemprosesan penglihatan berprestasi tinggi, sangat boleh dipercayai, mudah dan kaya dengan ciri. Model ini menyokong latihan YOLO untuk fungsi pengesanan kenderaan titik dan klik.
Sistem Stesen Tanah Prometheus
Stesen tanah Prometheus ialah antara muka mesin manusia yang dibangunkan menggunakan Qt, berdasarkan sistem Prometheus. Ia menggunakan komunikasi TCP/UDP untuk memudahkan konfigurasi komunikasi berbilang mesin. Stesen tanah membolehkan pengguna meniru pelbagai fungsi sistem Prometheus dengan cepat, menyediakan pemantauan masa nyata status UAV, serta ciri seperti operasi arahan berlepas satu klik, pendaratan dan kawalan kedudukan.
Aplikasi
-
Penyelidikan Saintifik dan Pembangunan AI
- Ujian algoritma AI
- Analisis data sensor lanjutan
- Pemprosesan dan penjejakan imej masa nyata
-
Aplikasi Perindustrian
- Pemetaan dan navigasi ketepatan dalam persekitaran yang kompleks
- Pengesanan dan pengelakan halangan dalam logistik dan pergudangan
- Pemeriksaan infrastruktur seperti talian kuasa dan saluran paip
-
Kegunaan Akademik dan Pendidikan
- Pengaturcaraan sekunder untuk penyelidikan AI berasaskan ROS
- Demonstrasi dan eksperimen makmal
- Latihan dalam navigasi dron autonomi
-
Penyelesaian Bandar Pintar
- Pembinaan semula spatial 3D untuk perancangan bandar
- Pemantauan dan pengurusan lalu lintas
- Pengawasan dan analisis alam sekitar
-
Pembangunan Tersuai
- Prototaip untuk aplikasi industri khusus
- Pengujian dan penyepaduan komponen perkakasan dan perisian baharu
-
Tindak Balas Bencana dan Pemantauan Alam Sekitar
- Pemeriksaan dan pemantauan udara di kawasan yang dilanda bencana
- Pengumpulan data alam sekitar untuk penyelidikan dan penggubalan dasar
P600 menyediakan fleksibiliti dan kefungsian yang tiada tandingan, membolehkan penyelidik, jurutera dan pembangun melaksanakan projek yang kompleks merentasi pelbagai senario.
Related Collections







