








Kit de desenvolvimento de drone de montagem CQ230 - Raspberry Pi 4B Pixhawk Ardupilot Kit de drone DIY programável industrial de código aberto com rack anticolisão
Kit de desenvolvimento de drone de montagem CQ230 - Raspberry Pi 4B Pixhawk Ardupilot Kit de drone DIY programável industrial de código aberto com rack anticolisão
RCDrone
Não foi possível carregar a disponibilidade de recolha
Visão geral
O CQ230 Assembly Drone Development Kit é um kit compacto e de código aberto Drone faça você mesmo plataforma alimentada pela Raspberry Pi 4B e Pixhawk controlador de voo. Com uma distância entre eixos de 230 mm, estrutura anticolisão e um sistema de energia 4S (16,8 V), este drone é ideal para aprender e experimentar recursos programáveis de código aberto. A plataforma é totalmente equipada para tarefas como navegação de waypoint, monitoramento de dados e streaming de vídeo em tempo real, tornando-a uma excelente escolha para desenvolvedores e iniciantes.
Principais características
- Design compacto: Com um tamanho de 360 mm x 360 mm x 300 mm, o drone é ideal para espaços pequenos.
- Rack anticolisão: A estrutura anticolisão totalmente em fibra de carbono garante durabilidade e proteção.
- Integração Raspberry Pi 4B: Aprimorado com Ubuntu 20.04 para operação e desenvolvimento suaves.
- Estrutura de código aberto: Distribuído por Ardupilot, com suporte para Dronekit, MAVLink e ROS.
- Programável Tarefas: Capaz de navegação autônoma, monitoramento de dados em tempo real e processamento visual.
- Navegação por pontos de passagem: Defina rotas com precisão baseada em GPS.
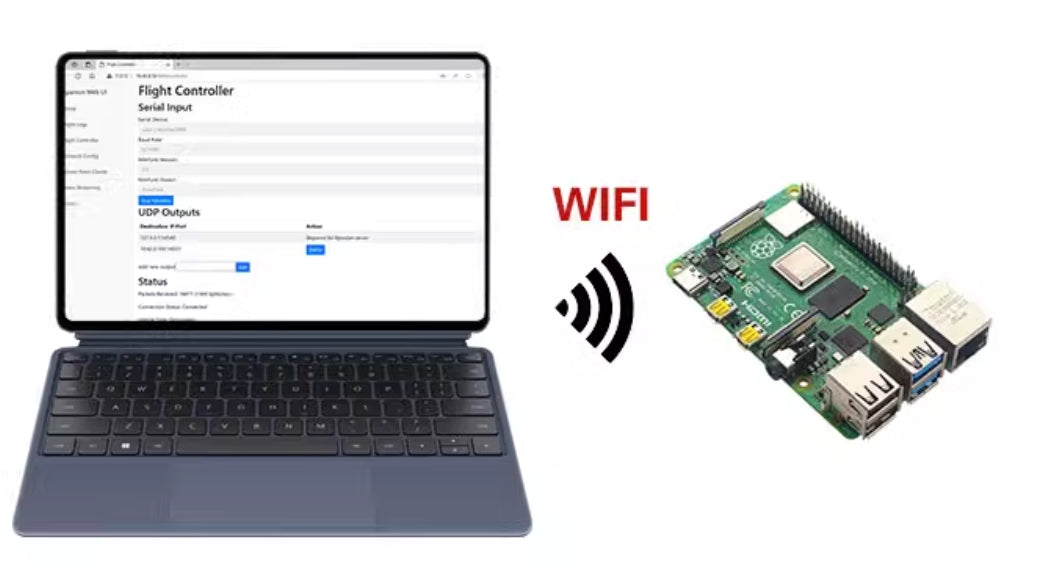
- Transmissão de dados em tempo real: Transferência de dados via WiFi para estações terrestres.
- Navegação visual: Sistemas de câmera dupla para navegação precisa em ambientes internos e prevenção de obstáculos.
- Controles programáveis: Utilize o Dronekit-Python para criar comandos de voo personalizados.
- Simulação de Sistema: Combine simulação SITL para testes contínuos de funcionalidade.
Especificações
| Parâmetro | Detalhes |
|---|---|
| Modelo | CQ230 |
| Distância entre eixos | 230 mm |
| Bateria | 4S (16,8 V) |
| Tempo de voo | 7 minutos |
| Capacidade de carga útil | 200g |
| Resistência ao vento | Nível 3-4 |
| Velocidade Máxima | 20 km/h |
| Altitude máxima de voo | 120m |
| Precisão de posicionamento | 2-3m (GPS) |
| Peso | 612g |
| Alcance do controle remoto | 700m |
Pacote
Versão básica
- Controlador de voo Pixhawk 2.4.8 ×1
- GPS M8N ×1
- Módulo de potência Ledi MINI PIX ×1
- Telemetria WiFi CUAV ×1
- 30A ESC ×4
- Hélice 5045 ×4
- Quadro CQ230 ×1
- Carregador de equilíbrio A400 ×1
- Bateria 4S 2300mAh ×1
- Motor 2205 ×4
- Controle Remoto FS-i6 ×1
- BB Alarme Buzzer ×1
- Módulo de Fluxo Óptico MF-01 ×1
Versão visual
- Pixhawk 2.4.8 Companhia de Voocontrolador ×1
- GPS M8N ×1
- Módulo de potência Ledi MINI PIX ×1
- Câmera CS ×1
- 30A ESC ×4
- Hélice 5045 ×4
- Quadro CQ230 ×1
- BB Alarme Buzzer ×1
- Módulo de Fluxo Óptico MF-01 ×1
- Carregador de equilíbrio A400 ×1
- Bateria 4S 2300mAh ×1
- Motor 2205 ×4
- Controle Remoto FS-i6 ×1
- Raspi 4B-4G Computador de Bordo ×1 Conjunto
- Câmera Visual T265 ×1
Aplicações
- Entrega: Transporte itens leves com eficiência.
- Desenvolvimento Educacional: Ideal para estudantes e pesquisadores explorarem sistemas de drones.
- Processamento Visual: Use o OpenCV para streaming e análise avançados de vídeo.
- Experimentos de Navegação: Experimente voos autônomos baseados em GPS e rastreamento de posição.
Notas adicionais
- O sistema inclui o Ubuntu 20.04 para uma interface de programação aprimorada.
- O ecossistema robusto do Ardupilot garante escalabilidade e versatilidade em aplicações de drones.
- Um kit de aprendizagem completo com tutoriais para iniciantes e profissionais.
Detalhes
Sistema de drone de código aberto CQ230

Pixhawk: Sistema de Hardware para Drones
Utiliza o controlador Pixhawk 2.4.8, equipado com o novo processador padrão de 32 bits STM32F427 e pareado com o barômetro 5611. É um controlador de código aberto de baixo custo com opções de interface ricas.

ArduPilot: Sistema de software para drones
O sistema de software do drone — essencialmente o firmware de controle — usa o projeto de código aberto ArduPilot, amplamente adotado.
(O ArduPilot fornece um sistema de software de piloto automático de código aberto, avançado, completo e confiável.)
Ele pode controlar todos os sistemas de drones imagináveis. Para aqueles que amam tecnologia, drones e exploração, entender o ArduPilot apresentará a você um mundo fascinante e envolvente.

O ArduPilot foi instalado em mais de 1.000.000 de sistemas de drones no mundo todo. Equipado com ferramentas avançadas de registro de dados, análise e simulação, é um sistema de piloto automático completamente testado e confiável. Ele também é usado por grandes organizações e empresas como NASA, Intel, Insitu, Boeing e vários institutos e universidades ao redor do mundo para testes e desenvolvimento.

Estação de controle terrestre do planejador de missão
Características:
- Ferramentas de ajuste e configuração de parâmetros de drones;
- Defina rotas de voo em mapas, permitindo que os drones sigam rotas predefinidas automaticamente;
- Selecione comandos de missão nos menus suspensos para controlar o drone;
- Baixar e analisar logs;
- Realizar simulações utilizando o sistema SITL (Software In The Loop);
- Mais recursos aguardam você descobrir, e as possibilidades não terminam aqui...


| Recursos predefinidos | Versão básica | Versão visual |
|---|
| Desenho de linha | ✓ | ✓ |
| Altitude Hold, Hover, Estabilização | ✓ | ✓ |
| Retorno para casa, retorno à prova de falhas | ✓ | ✓ |
| Aterrissagem, Pouso com Bateria Fraca | ✓ | ✓ |
| Posicionamento GPS ao ar livre e voo de rota | ✓ | ✓ |
| Controle programável Dronekit-Python | ✓ | ✓ |
| Telemetria WiFi para transmissão de dados em tempo real (alcance de aproximadamente 5 m) | ✗ | ✓ |
| Posicionamento de fluxo óptico interno, fixação de altitude a laser | ✓ | ✓ |
| Navegação de posicionamento visual duplo interno, pontos de ancoragem MP, voo de rota, pouso preciso com reconhecimento de código QR | ✗ | ✓ |
Adequado para voo interno
Design compacto com dimensões de 360 mm × 360 mm × 300 mm, ideal para operações em espaços pequenos.

Estrutura em fibra de carbono, forte e resistente a quedas

O design do anel anticolisão protege efetivamente o motor e as pás da hélice para garantir a segurança do voo;

Expansibilidade aprimorada para desenvolvimento funcional em vários cenários
Com base no modelo básico, o sistema adiciona Raspberry Pi 4B e integrou o sistema Raspberry Pi. Este sistema inclui:
- Ubuntu 20.04 (sistema operacional de código aberto com interface gráfica)
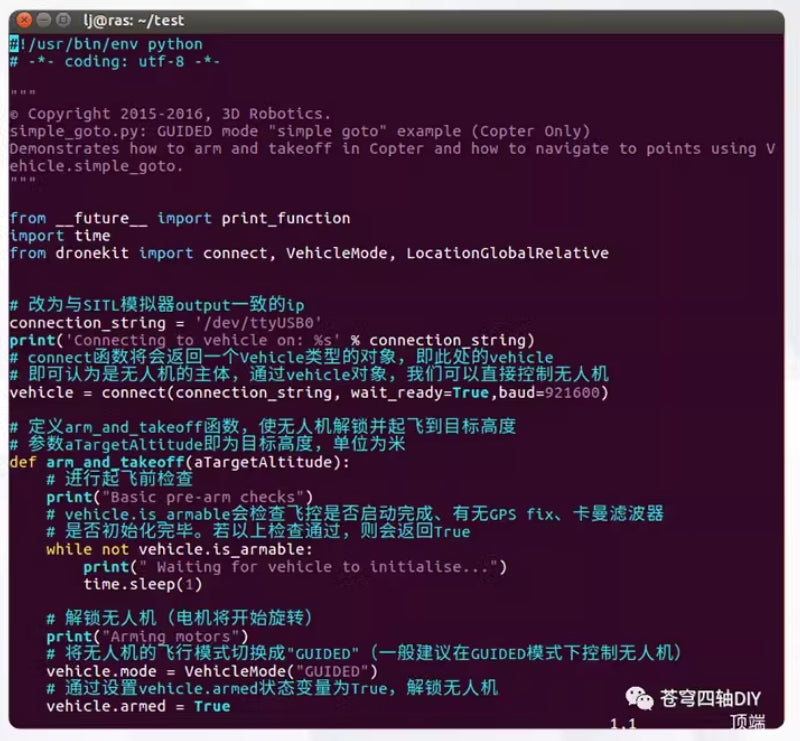
- Dronekit-Python (uma biblioteca Python para programação de controle de drones usando Dronekit)
- Link do Pymav (uma implementação Python do protocolo MAVLink, permitindo o controle programável de drones usando Pymavlink)
- ROS (Sistema Operacional de Robôs)
- Mavros (um protocolo de comunicação para controlar drones via ROS)
- Gstreamer (transmissão de streaming de vídeo de baixa latência)
- Roteador Mavlink (distribui dados do controlador de voo MAVLink para diferentes pontos de extremidade)
- CV aberto (biblioteca de software de código aberto para processamento de visão computacional)

Com base no sistema acima, o drone pode alcançar:
- Controle de drone programável usando Dronekit-Python
2. Processamento Visual de CV ABERTO
Adicionada uma câmera CSI, permitindo transmissão de imagem e pós-processamento:
- Os fluxos visuais podem ser capturados usando o Raspberry Pi e processados com ferramentas como o OpenCV.
- Transmissões de vídeo HD em tempo real também podem ser transmitidas de volta para um PC para processamento ou enviadas para um dispositivo móvel para revisão.

3. Transmissão de vídeo HD em tempo real
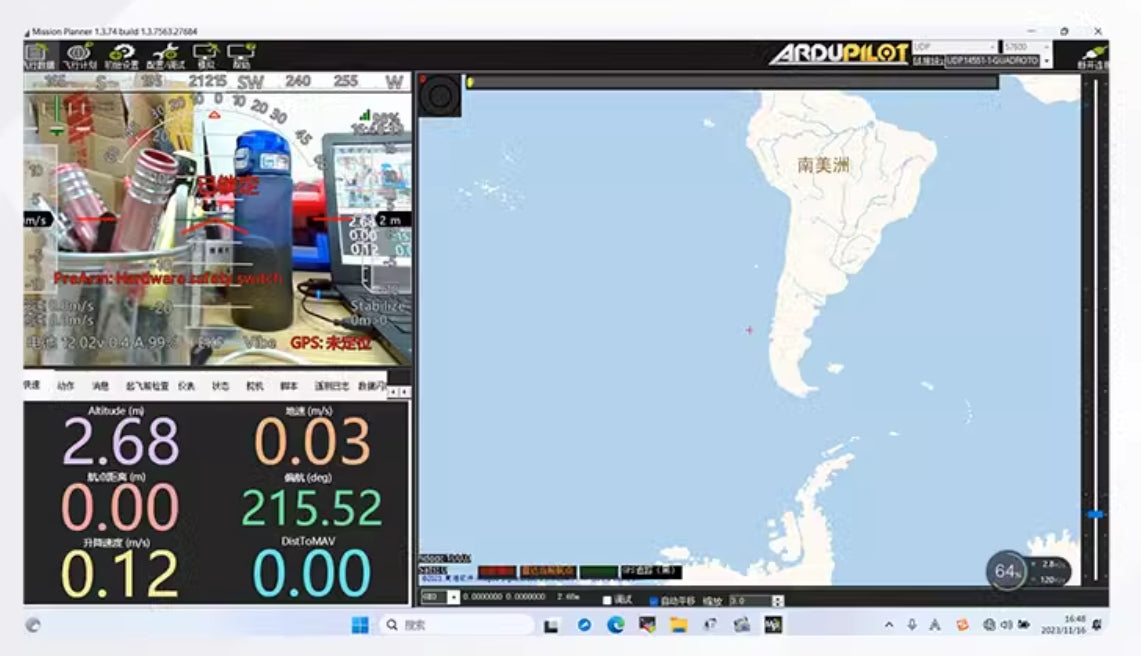
4.Monitoramento de dados da estação terrestre
A comunicação e a transmissão de imagens entre a rede WiFi e a estação terrestre do PC (MP) podem ser alcançadas sem a necessidade de módulos de transmissão adicionais. Após o PC se conectar ao hotspot WiFi do 4B, a transmissão de dados e imagens pode ser iniciada acessando 10.42.0.10:3000 através de um navegador da web.
5. Desenvolvimento de recursos adicionais e verificação de algoritmo com base no sistema de código aberto acima
Tutoriais de suporte da versão visual:
Além dos tutoriais da versão básica, também são fornecidos tutoriais introdutórios para o processamento visual do Raspberry Pi.
Related Collections









