







پهپاد تحقیقاتی علمی پهپاد P600 - ROS AI Experimental Secondary Programming Platforming Industrial Development Platform Studio Lab Drone DIY Kit
پهپاد تحقیقاتی علمی پهپاد P600 - ROS AI Experimental Secondary Programming Platforming Industrial Development Platform Studio Lab Drone DIY Kit
RCDrone
در دسترس بودن پیکاپ بارگیری نشد
نمای کلی
را پهپاد تحقیقاتی علمی P600 یک پلت فرم پیشرفته است که برای تحقیقات علمی، توسعه صنعتی و آزمایش هوش مصنوعی طراحی شده است. مجهز به عملکرد بالا ماژول محاسباتی NVIDIA Jetson Orin NX، تحویل می دهد 100 تاپ قدرت محاسباتی، آن را برای برنامه های پیشرفته هوش مصنوعی ایده آل می کند. این پهپاد دارای یک زوم اپتیکال 40 برابر دوربین گیمبال برای تصویربرداری با وضوح بالا، 3D LiDAR SLAM برای نقشه برداری دقیق و موقعیت یابی RTK برای دقت در سطح سانتی متر آن نرم افزار یکپارچه Prometheus V2 و کتابخانه بینایی SpireCV از برنامه نویسی ثانویه پشتیبانی می کند و آن را به ابزاری همه کاره برای توسعه دهندگان تبدیل می کند. با مدت زمان پرواز تا 21 دقیقه، یک محور مورب 600 میلی متر، و قوی است وزن برخاست 4.05 کیلوگرم، P600 برای محیط های تحقیق و توسعه پویا بهینه شده است.
مشخصات
هواپیما
| صفت | جزئیات |
|---|---|
| نوع هواپیما | کوادکوپتر |
| وزن برخاستن | تقریبا 4.05 کیلوگرم (شامل باتری) |
| فاصله محور مورب | 600 میلی متر |
| ابعاد | طول 469 میلی متر، عرض 469 میلی متر، ارتفاع 400 میلی متر |
| حداکثر زمان شناور | تقریبا 21 دقیقه |
| دقت شناور | RTK: ± 0.015 متر (افقی)، ± 0.01 متر (عمودی) 3D LiDAR SLAM: ± 0.2 متر (افقی)، ± 0.1 متر (عمودی) |
| دمای عملیاتی | 6 درجه سانتی گراد ~ 40 درجه سانتی گراد |
| تراشه اصلی MCU | STM32H743VIT6 / 216 مگاهرتز / ذخیره سازی برنامه 2M / ذخیره سازی داده 512 کیلوبایت |
| IMU | ICM20689 |
| فشارسنج | BMP388 |
| MTD | AT24C64 |
| رابط های ورودی/خروجی | PX4IO-V2 داخلی، از 8 پشتیبانی می کندرابط های PWM، 1رابط RC (پشتیبانی از SBus، PPM، DSM) رابط های خارجی: 3UART (GH1.25 6 پین)، 1CAN (4 پین GH1.25)، رابط USB کنترل پرواز (نوع C) |
کامپیوتر آنبرد
| صفت | جزئیات |
|---|---|
| نام | کامپیوتر Onboard Allspark-Orin NX |
| مدل | IA160_V1 |
| وزن | تقریبا 188 گرم |
| ابعاد | 102.5 میلی متر × 62.5 میلی متر × 31 میلی متر (از جمله فن) |
| پردازنده | NVIDIA Jetson Orin NX |
| حافظه | 16 گیگابایت LPDDR5 |
| قدرت محاسباتی | 100 تاپ |
| پردازنده گرافیکی | 32 هسته تانسور یکپارچه گرافیکی با معماری 1024 هسته ای NVIDIA Ampere |
| CPU | پردازنده 64 بیتی 8 هسته ای Arm® Cortex®-A78AE v8.2 (2MB L2 + 4MB L3) |
| SSD | 128 گیگابایت (M.2 رابط، قابل ارتقا) |
| اترنت | 100 مگابیت بر ثانیه x2 (1 پورت اترنت اختصاصی، 1 پورت قابل تعویض) |
| وای فای | 5G |
| نمایش | Micro HDMI (1920*1080P) |
| پورت های USB | USB2.0: Type-A x1، Type-C x1 USB2.0: OTG x1 |
| منبع تغذیه | 10~26V @ 3A |
باتری برق
| صفت | جزئیات |
|---|---|
| مدل | LPB610HV |
| ظرفیت | 10000 میلی آمپر ساعت |
| وزن باتری | 1.2 کیلوگرم |
| ولتاژ عملیاتی | 22V~26.1V |
| ولتاژ ذخیره سازی | 23.1 ولت |
| ابعاد | طول 180 میلی متر، عرض 90 میلی متر، ارتفاع 63 میلی متر |
کنترل از راه دور
| صفت | جزئیات |
|---|---|
| مدل | H16 |
| کانال ها | 16 |
| فرکانس | 2.400 ~ 2.483 گیگاهرتز |
| ولتاژ عملیاتی | 4.2 ولت |
| باتری | 20000 میلی آمپر ساعت |
| پورت شارژ | Type-C 9V-2A |
| وزن | 1034 گرم |
| ابعاد | طول 272 میلی متر، عرض 183 میلی متر، ارتفاع 94 میلی متر |
لینک ارتباط
| صفت | جزئیات |
|---|---|
| مدل | R16 |
| فاصله ارتباطی | تقریبا 600 متر، پهنای باند 3.5 مگابیت بر ثانیه |
| ولتاژ عملیاتی | 7.2 ولت تا 72 ولت |
| رابط ها | 2UART، 1اترنت، 1HDMI، 1نوع C |
| ابعاد | طول 76 میلی متر، عرض 69 میلی متر، ارتفاع 11 میلی متر |
دوربین گیمبال
| صفت | جزئیات |
|---|---|
| مدل | GX40 |
| ابعاد گیمبال | طول 85.8 میلی متر، عرض 86 میلی متر، ارتفاع 129.3 میلی متر |
| ابعاد GCU | طول 45.4 میلی متر، عرض 40 میلی متر، ارتفاع 13.5 میلی متر |
| وزن گیمبال | 405 گرم |
| وزن GCU | 18.6 گرم |
| ولتاژ عملیاتی | 14 ~ 53 ولت |
| پروتکل جریان | RTSP (پیشفرض) |
| فرمت رمزگذاری | H.264 / H.264H / H.264B / H.265 / MJPEG |
| قطعنامه | - 4K30fps - 1080P@30fps - SCGA (12801024)@30fps <br> - 1.3M (1280960)@30fps - 720P@30fps |
| میزان بیت | [email protected]، [email protected] |
لنز
| صفت | جزئیات |
|---|---|
| تایپ کنید | لنز زوم اپتیکال |
| فاصله کانونی | 4.8 ~ 48 میلی متر |
| دیافراگم (F/NO) | f1.7~f3.2 |
| FOV مورب (D) | 67.2 درجه ~ 7.6 درجه |
| FOV عمودی (V) | 36.1°~3.7° |
| FOV افقی (H) | 60.2 درجه ~ 6.6 درجه |
| نسبت زوم اپتیکال | 10 برابر |
سنسور تصویر
| صفت | جزئیات |
|---|---|
| نوع سنسور | CMOS |
| پیکسل های موثر | 8.29 میلیون |
| اندازه سنسور | 1/2.8 اینچ |
| اندازه پیکسل | 1.45×1.45 (μm) |
| سرعت شاتر الکترونیکی | 1~1/30000s |
روشنگر
| صفت | جزئیات |
|---|---|
| تایپ کنید | لیزر |
| طول موج | 10±850 نانومتر |
| قدرت | 0.8 وات |
| فاصله روشنایی | ≤200 متر |
RTK
| صفت | جزئیات |
|---|---|
| مدل | M15-RTK |
| وزن | 90 گرم |
| ابعاد | طول 80 میلی متر، عرض 50 میلی متر، ارتفاع 20 میلی متر |
| انواع ماهواره های پشتیبانی شده | BDS/GPS/GLONASS/QZSS |
| منبع تغذیه | 9 ~ 36 ولت (12 ولت توصیه می شود) |
| رابط آنتن | SMA-F |
| پورت های کاربردی | UARTx2، CANx1، USB2.0x1 |
شارژر
| صفت | جزئیات |
|---|---|
| مدل | C1-XR |
| ولتاژ ورودی AC | 100 تا 240 ولت |
| ولتاژ ورودی DC | 11 ~ 18 ولت |
| ابعاد | طول 130 میلی متر، عرض 115 میلی متر، ارتفاع 61 میلی متر |
| وزن | 380 گرم |
| جریان شارژ | 0.1A ~ 10A |
| سلول های باتری پشتیبانی شده | 1 تا 6 سلول |
3D LiDAR
| صفت | جزئیات |
|---|---|
| مدل | MID360 |
| طول موج لیزر | 905 نانومتر |
| محدوده تشخیص | 40 متر (با بازتاب 105 درصد) |
| میدان دید (FOV) | افقی: 360 درجه، عمودی: -7°~52° |
| حداقل برد | 0.1 متر |
| نرخ ابر نقطه ای | 10 هرتز (معمولی) |
| امتیاز در ثانیه | 200000 امتیاز در ثانیه |
| رابط داده | 100 BASE-TX اترنت |
| همگام سازی داده ها | IEEE 1588-2008 (PTP v2)، GPS |
| IMU داخلی | ICM40609 |
| منبع تغذیه | 7 تا 27 ولت |
| ابعاد | 65 میلیمتر (W) × 65 میلیمتر (D) × 60 میلیمتر (بالا) |
| وزن | 115 گرم |
| دمای عملیاتی | -20 درجه سانتی گراد ~ 55 درجه سانتی گراد |
پارامترهای نرم افزار
کامپیوتر آنبرد
| صفت | جزئیات |
|---|---|
| مدل | جتسون اورین NX |
| سیستم عامل | اوبونتو 20.04 |
| نام کاربری | amov |
| رمز عبور | amov |
| نسخه L4T | 35.2.1 |
| نسخه جت پک | 5.1 |
| نسخه CUDA | 11.4.315 |
| Realsense SDK | 2.50.0 |
| نسخه ROS | متذکر |
| نسخه OpenCV | 4.7.0 |
| Realsense ROS | 2.3.2 |
لیست بسته
| نام | مشخصات/مدل | مقدار/واحد |
|---|---|---|
| هواپیمای اصلی P600 | P600-Allpark2-RTK-GX40-S3 | 1 مجموعه |
| ترمینال زمینی M15-RTK | M15-RTK | 1 عدد |
| آنتن قارچ GNSS | آنتن قارچ | 1 عدد |
| کابل آنتن GNSS | کابل پسوند آنتن | 1 کابل |
| کنترل از راه دور H16 | H16 | 1 واحد |
| باتری 10000 میلی آمپر ساعتی 6S | 6S 10000 میلی آمپر ساعت | 1 مجموعه |
| باتری لیتیومی 3S 4000mAh | 3S 4000 میلی آمپر ساعت | 1 مجموعه |
| شارژر متعادل کننده هوشمند | C1-XR | 1 واحد |
| کابل شبکه | 1.5 متر | 1 کابل |
| طناب ایمنی | 50 متر | 1 بسته |
| براکت HDMI | / | 1 عدد |
| کابل آداپتور HDMI | / | 1 عدد |
| پیکربندی کامپیوتر | / | 1 عدد |
| بشقاب قطره ای دوبعدی | 35×35 سانتی متر | 1 عدد |
| کیس هوانوردی | 740×540×510 میلی متر | 1 مجموعه |
| بسته کابل لوازم جانبی | / | 1 بسته |
| گواهینامه | / | 1 ورق |
| چک لیست تست عملکرد | / | 1 ورق |
جزئیات
پلت فرم توسعه پهپادهای تحقیقاتی علمی Prometheus 600
را پلت فرم توسعه پهپادهای تحقیقاتی علمی Prometheus 600 (به عنوان P600 نامیده می شود) محصول نسل چهارم در سری P600 است. این دو فناوری اصلی را عمیقاً ادغام می کند، پرومتئوس و SpireCV، و مجهز به دوربین گیمبال با زوم اپتیکال 40 برابر است. این راهاندازی شناسایی و ردیابی هدف از راه دور، فرود خودکار از ارتفاعات بالا و مأموریتهای کروز هوایی را امکانپذیر میسازد.
این سیستم از 3D LiDAR SLAM با پشتیبانی می کند Fast-lio، دستیابی به نقشه برداری سه بعدی SLAM با دقت بالا. علاوه بر این، آن را ویژگی های الگوریتم همکاری چند عاملی EGO-Swarm، امکان استفاده در سناریوهای مختلف مانند بازسازی فضایی سه بعدی داخلی و خارجی و اجتناب از موانع در طول ناوبری پهپاد را فراهم می کند.
این قابلیت های پیشرفته توسط ایستگاه زمینی حرفه ای پرومتئوس، که بازخورد بصری در زمان واقعی، نظارت بر عملیات و تنظیم پارامترهای پویا را ارائه می دهد و تسلط و تسریع در توسعه ثانویه را برای توسعه دهندگان آسان تر می کند.

سه نسخه از پهپاد P600

کنترل انعطاف پذیر گیمبال نوری-الکترونیکی
دوربین گیمبال GX40 از کنترل چند سناریویی پشتیبانی میکند و کنترل از راه دور مبتنی بر زنجیره را یکپارچه میکند تا جستجوی هدف را در طول مسیریابی در ایستگاه بینالمللی فعال کند. با استفاده از کتابخانه بینایی SpireCV، شناسایی و ردیابی اهداف را تسهیل می کند و به قفل شدن گیمبال روی هدف در زمان واقعی دست می یابد.
- روشنایی شب
- شناسایی و ردیابی هدف

کلیک و ردیابی هدف
با استفاده از الگوریتم تشخیص YOLOv5 و با استفاده از مجموعه داده جهانی COCO، اهداف شناسایی و ردیابی می شوند. را الگوریتم ردیابی نانو مسیر روی اهداف انتخاب شده برای ردیابی قفل می شود. بدون تغییر در شرایط، اهداف تا فاصله 30 متری قابل شناسایی و ردیابی هستند. از طریق زوم اپتیکال 40 برابر و زوم الکترونیکی، شناسایی و ردیابی هدف از راه دور حاصل می شود. در طول ردیابی پهپاد، ایستگاه زمینی حرفه ای پرومتئوس سوئیچ های ردیابی هدف مبتنی بر فاصله پویا را امکان پذیر می کند (پیش فرض 10 متر است).
- ردیابی در 30 متر
- ردیابی در 20 متر
- ردیابی در 10 متر

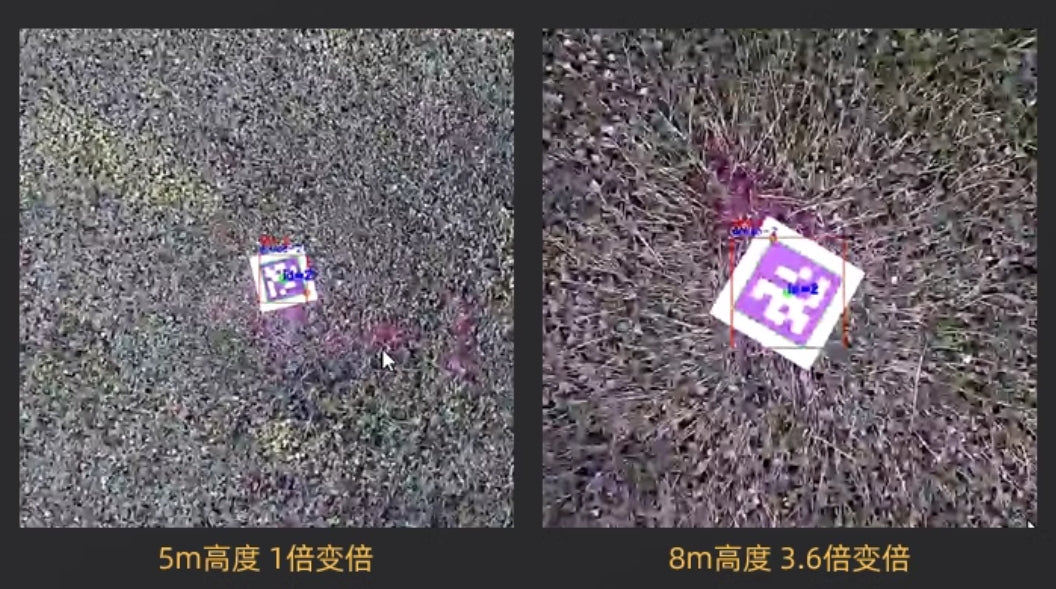
فرود با کد QR هدایت شده
با استفاده از کتابخانه بینایی SpireCV، تشخیص دقیق و تخمین موقعیت کدهای QR به دست می آید. GX40 می تواند فرود با هدایت دقیق را روی کدهای QR از ارتفاعات مختلف انجام دهد. مرکز دوربین گیمبال با مرکز کد QR در یک حاشیه خطای 30 سانتی متری همسو می شود.
- ارتفاع 5 متر، زوم 1 برابر
- 8 متر ارتفاع، زوم 3.6 برابر
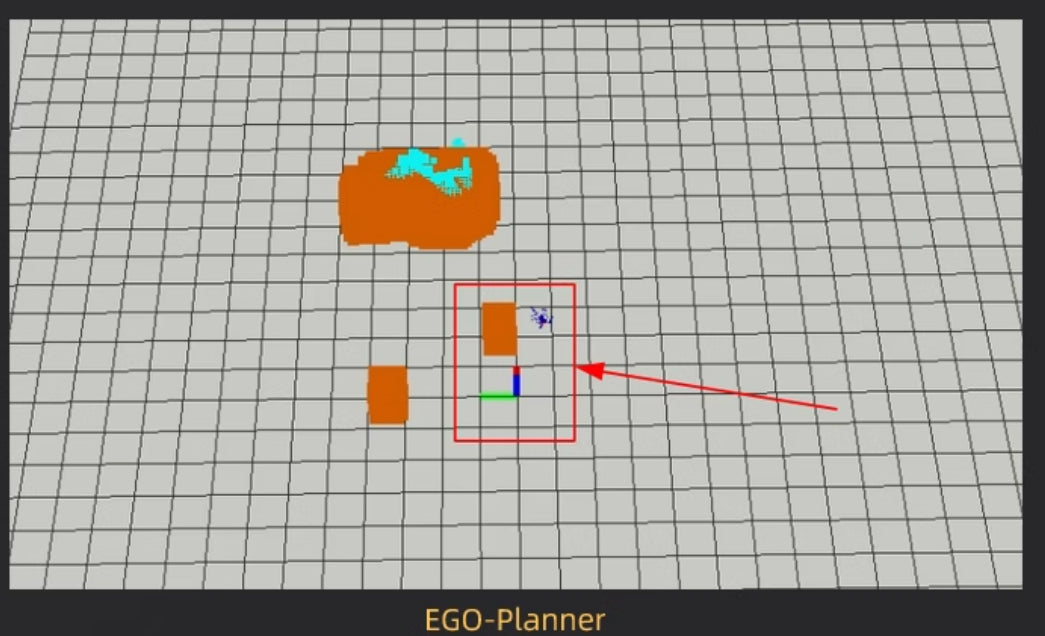
EGO-Planner
پشتیبانی می کند الگوریتم برنامه ریزی مسیر EGO-Planner و فراهم می کند الگوریتم نقشه برداری Octomap. در ترکیب با ایستگاه زمینی حرفه ای، برنامه ریزی مسیر پویا سه بعدی مستقل را امکان پذیر می کند.
برنامه های کنترل پایدار و قابل اعتماد هواپیماهای بدون سرنشین
پهپاد P600 مجهز به تجهیزات RTK با دقت بالا است که با دقت بالا شناور در فضای باز با دقت افقی تا 1 سانتی متر و دقت عمودی تا 1.5 سانتی متر را به دست می آورد. همراه با ماژول کنترل سیستم نرم افزار Prometheus، کنترل دقیق پهپاد را امکان پذیر می کند.
ماژول کنترل پهپاد به عنوان یک "پل" بین برنامه های نرم افزاری و پهپاد عمل می کند و حالت های کنترلی متعددی مانند شناور شدن موقعیت اولیه، شناور شدن موقعیت فعلی، فرود و حرکت را فراهم می کند. اینها شامل شش حالت کنترل است: موقعیت معمولی سیستم، سرعت، کنترل یکپارچه موقعیت و سرعت، و حالت کنترل مسیر. در مجموع، هفت حالت کنترل را ارائه می دهد.

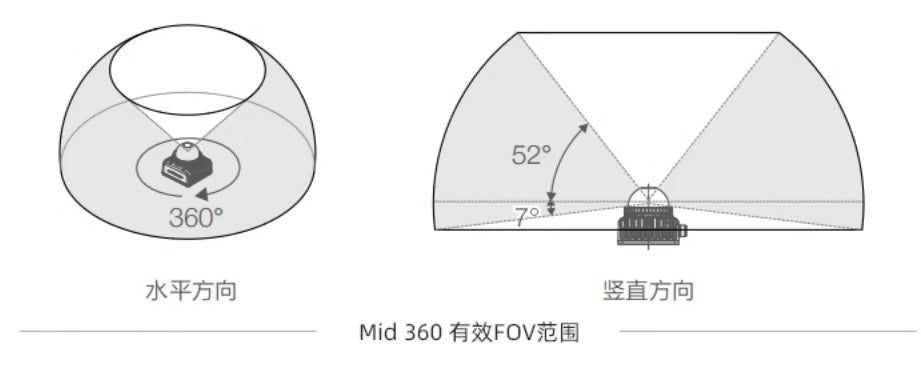
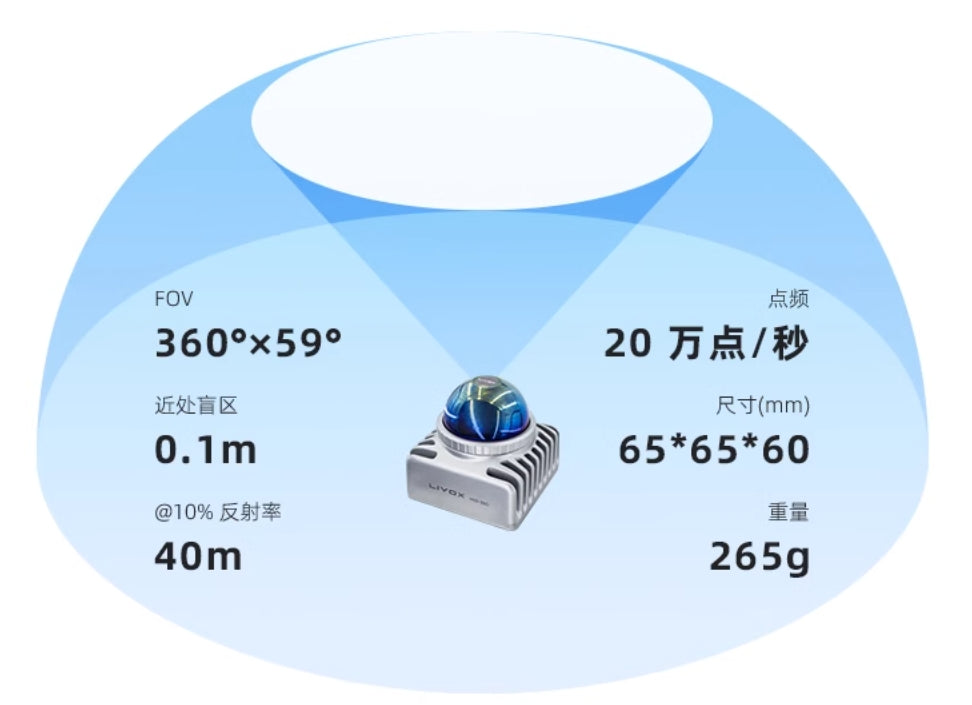
3D LiDAR Mid-360
- منطقه کم کور | میدان دید گسترده | برنامه چند سناریویی
را اواسط 360 ویژگی های الف FOV 360 درجه افقی و الف حداکثر FOV عمودی 59 درجه. هنگامی که بازتاب شی هدف 10٪ باشد، حداکثر محدوده تشخیص می تواند برسد 40 متر، و محدوده منطقه کور به اندازه کوچک است 10 متر. با محیط های مختلف پیچیده مانند نور کم و نور قوی سازگار است.
مجهز به ماژول Mid-360، پهپاد P600 پوشش پانوراما از منطقه کور را به دست می آورد و از عملکرد بدون درز هواپیماهای بدون سرنشین در محیط های چند سناریویی اطمینان حاصل می کند.
- توضیحات نمودار:
- جهت افقی: 360 درجه
- جهت عمودی: حداکثر FOV 52 درجه

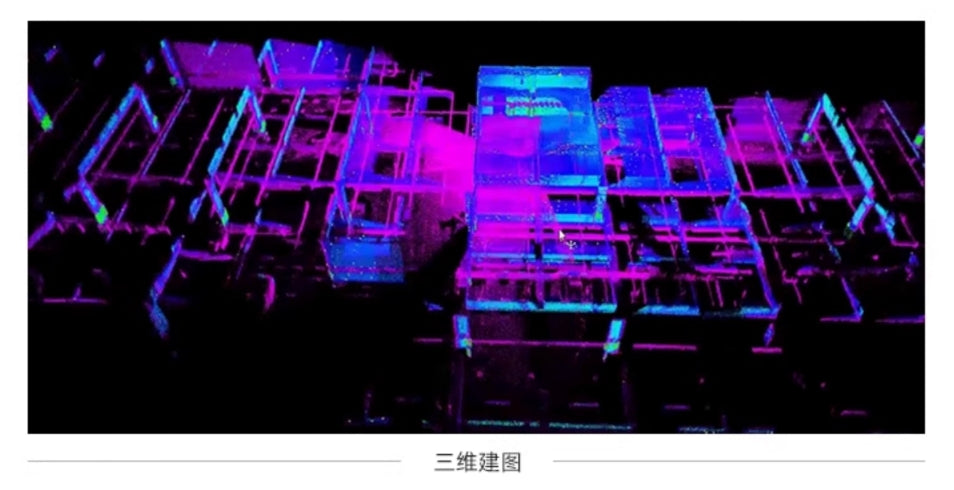
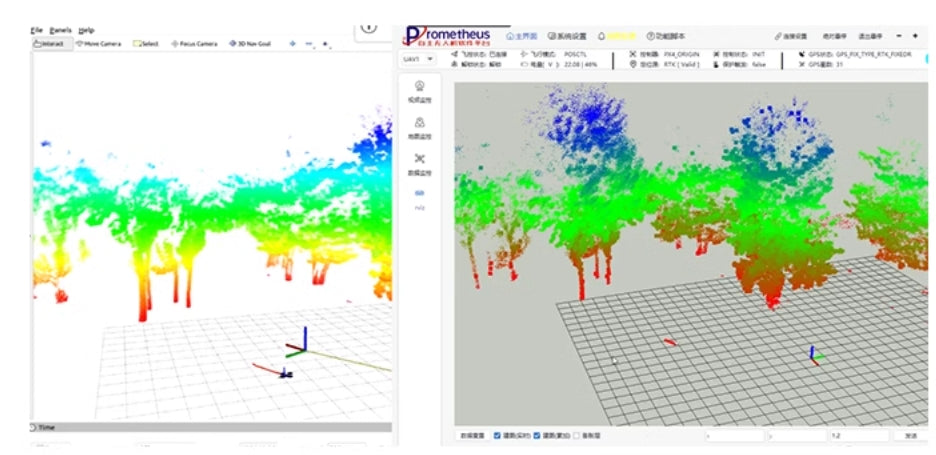
نقشه برداری محیطی سه بعدی سریع و دقیق
را پهپاد P600 مجهز به قابلیتهای پیشرفته سنجش محیطی است که به آن اجازه میدهد به سرعت دادههای محیطی اطراف را در طول پرواز جمعآوری کند. این داده ها در زمان واقعی پردازش می شوند تا a نقشه محیطی سه بعدی، ارائه آگاهی مکانی دقیق و پشتیبانی ناوبری برای وظایف مختلف.
برنامه ریزی مسیر EGO-Swarm برای ناوبری و اجتناب از موانع
را Mid360 دادههای ابر نقطهای و دادههای مکان را همراه با الگوریتم برنامه ریزی مسیر EGO-Swarm، به طور قابل توجهی توانایی پهپاد را برای انطباق مستقل با تغییرات محیطی پویا افزایش می دهد. می تواند در زمان حرکت به موانع آنالیز و پاسخ دهد و هدف ردیابی را به صورت پویا با حداکثر سرعت تنظیم کند. 2 متر بر ثانیه. این امر انعطاف پذیری و سازگاری استثنایی را در سناریوهای عملیاتی ناشناخته و پیچیده تضمین می کند.
این ویژگی کارایی کار پهپاد را تا حد زیادی بهبود میبخشد و آن را قادر میسازد تا انواع وظایف را به طور موثر و دقیق انجام دهد.
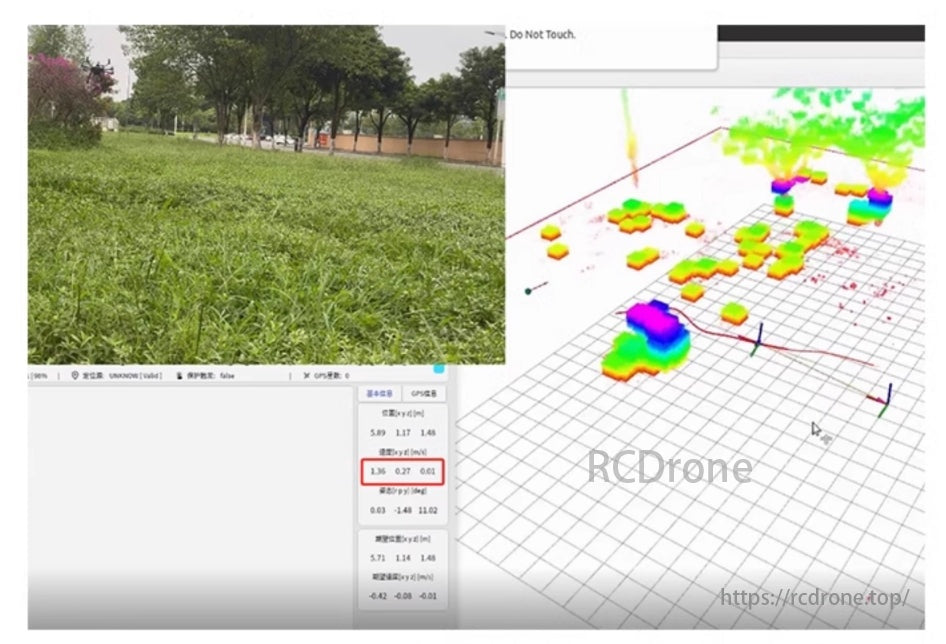
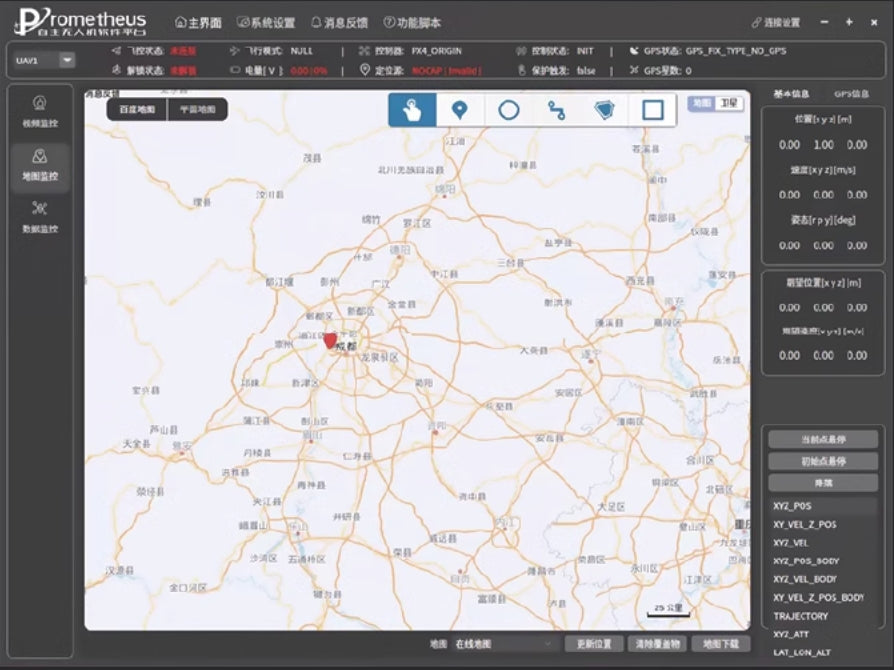
تعامل با هواپیماهای بدون سرنشین ایستگاه زمینی حرفه ای پرومتئوس
- تعامل ایستگاه زمینی
این رابط و قابلیت های تعاملی را نشان می دهد ایستگاه زمینی حرفه ای پرومتئوس، امکان ارتباط و عملیات یکپارچه با پهپاد را از طریق نقشه برداری محیطی سه بعدی فراهم می کند.
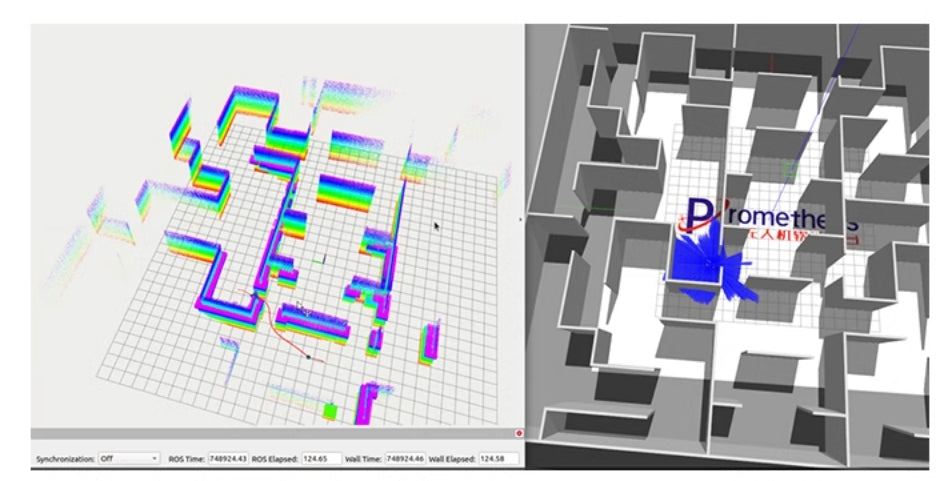
نسخه ی نمایشی عملکرد شبیه سازی یکپارچه
- شبیه سازی سه بعدی LiDAR SLAM و EGO-Swarm Path Planning
این شبیه سازی را نشان می دهد 3D LiDAR SLAM و برنامه ریزی مسیر EGO-Swarm در یک محیط ساختاریافته، قابلیت های سیستم را در یک نسخه نمایشی کنترل شده به نمایش می گذارد.
ویژگی های سخت افزاری
قاب هواپیمای بدون سرنشین
را Kedway DP1000 پلت فرم پهپاد درجه صنعتی از a FOC (کنترل میدان گرا) سیستم قدرت، موتور را قادر می سازد تا به طور پایدار، با نویز کم، راندمان بالا و پاسخ دینامیکی سریع بچرخد. کل سیستم پهپاد به حالت "آماده برای پرواز" با کیفیت سخت افزاری عالی دست می یابد و عملکرد پروازی پایدار را تضمین می کند. پشتیبانی می کند استقامت فوق العاده طولانی (70 دقیقه بدون بار)، در حالی که پهپاد P600 تقریبا نیاز دارد 24 دقیقه برای تثبیت در طول موقعیت یابی

واحد محاسباتی قدرتمند
- Allspark Micro Edge Computing Unit، مجهز به ماژول NVIDIA Orin NX، ارائه 100 TOPS قدرت محاسباتی ممیز شناور.
- اندازه فشرده، سبک وزن، سازگاری با سیستم قوی و محاسبات با کارایی بالا با شتاب GPU.
- از پیش نصب شده با تمام محیط های توسعه، آماده برای استفاده، افزایش بهره وری توسعه ثانویه.
- ابعاد: 102.5 میلی متر × 62.5 میلی متر × 31 میلی متر

کنترلر انتقال تصویر یکپارچه
یک کنترل از راه دور هواپیماهای بدون سرنشین درجه صنعتی ترکیب داده ها، تصویر و کنترل در یک.
- باند فرکانس: 2.4-2.483 گیگاهرتز
- حداکثر فاصله انتقال: 30 کیلومتر
- کیفیت تصویر: 1080P
- عمر باتری: 8-15 ساعت کار مداوم
در طول عملیات پهپاد، کاربران میتوانند اطلاعات پهپاد را در زمان واقعی نظارت کنند، فیلمهای دوربین را مشاهده کنند و به طور همزمان پهپاد را با جوی استیک کنترل کنند و از عملیات پرواز کاملاً تصویری اطمینان حاصل کنند.

دو آنتن RTK با دقت بالا
این پهپاد مجهز به یک ماژول موقعیت یابی RTK-GNSS، که از فناوری موقعیت یابی دیفرانسیل فاز حامل سریع و الگوریتم های سرکوب چند مسیری برای ارائه دقت موقعیت یابی در سطح سانتی متر برای پهپادها استفاده می کند. این می تواند به طور همزمان داده های RTCM را از چندین ایستگاه مرجع زمینی دریافت کند و از محاسبات پایه کوتاه، متوسط و بلند RTK پشتیبانی کند.
با چند زبان داخلی رابط کاربری گرافیکی وب، پیکربندی آستانه صفر را فعال می کند و نمایش داده ها و فرآیندهای ارتقاء را به تصویر می کشد. گیرنده همچنین دارای یک رابط پیکربندی صفحه وب کاربر پسند است که به طور قابل توجهی مانع عملیاتی را کاهش می دهد. این رابط های غنی ارائه می دهد و با سناریوهای مختلف برنامه سازگار است و عملکرد استثنایی را در موقعیت یابی دقیق ارائه می دهد.

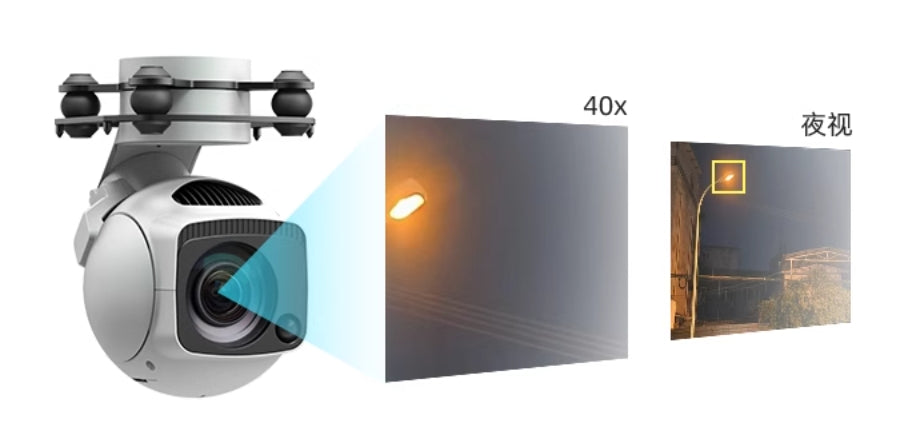
گیمبال اپتیکال-الکترونیک 40x
مجهز به گیمبال غیر متعامد 3 محوری با دقت بالا، دارای یک دوربین 8.29 مگاپیکسلی با زوم اپتیکال 10 برابری همراه با فناوری زوم دیجیتال است که به بزرگنمایی 40 برابری دست می یابد. می تواند خروجی دهد 4K@30FPS video از طریق شبکه جریان می یابد. علاوه بر این، مجهز به یک ماژول روشنایی لیزری است که تصاویر واضحی را حتی در محیط های کاملا تاریک ممکن می کند.
MID 360 3D LiDAR
Mid-360 یک سنسور تشخیص و محدوده لیزری مقرون به صرفه، ایمن و قابل اعتماد است. این به طور گسترده در زمینه هایی مانند ربات های لجستیک، ربات های صنعتی و شهرهای هوشمند استفاده می شود و از عملکردهایی مانند نقشه برداری، موقعیت یابی، شناسایی و اجتناب از موانع پشتیبانی می کند. Mid-360 می تواند اجسام نزدیک به 0.1 متر و تا فاصله 100 متری را تشخیص دهد. دارای اندازه جمع و جور، میدان دید وسیع، وضوح بالا، قابلیت اطمینان بالا و IMU یکپارچه است.
مشخصات:
- FOV: 360 × 59 درجه
- حداقل فاصله تشخیص: 0.1 متر
- محدوده (@10% بازتاب): 40 متر
- فرکانس نقطه ای: 200000 امتیاز در ثانیه
- ابعاد (میلی متر): 65 × 65 × 60
- وزن: 265 گرم
ویژگی های نرم افزار
سیستم نرم افزاری Prometheus V2
پلتفرم توسعه مبتنی بر ROS و چارچوب منبع باز Prometheus است که عملکردهای غنی و تعداد زیادی رابط توسعه ثانویه را برای سفارشی سازی کارآمد ارائه می دهد. این رابط برای داده های وضعیت پهپاد و حسگر، از جمله اطلاعات مکان، حالت های پرواز، وضعیت باتری و IMU فراهم می کند. علاوه بر این، رابط های کنترلی برای موقعیت، سرعت، شتاب و نگرش و همچنین برنامه های نمونه برای استفاده از رابط توسعه ارائه می دهد. این پهپاد همچنین شامل عملکردهای بازرسی ایمنی پرواز داخلی (نه اجتناب از موانع)، فرود خودکار در موقعیتهای غیرعادی برای کاهش خطرات سقوط، و ایمنتر ساختن توسعه است.

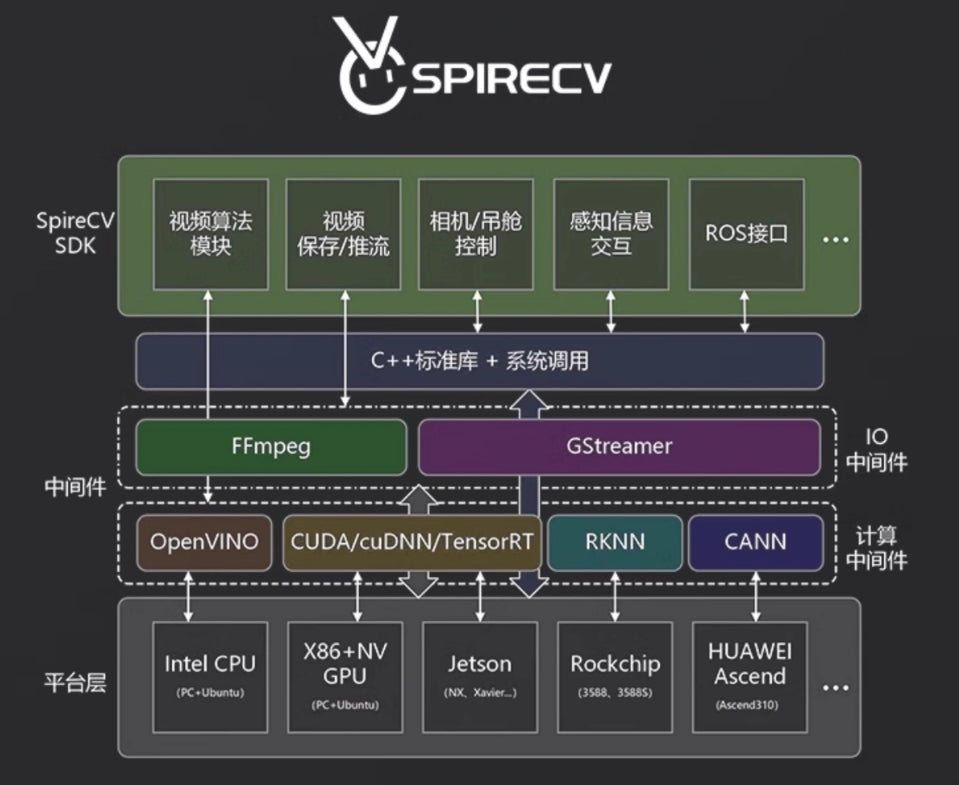
کتابخانه چشم انداز SpireCV
بر اساس کتابخانه چشم انداز SpireCV، این یک SDK پردازش تصویر در زمان واقعی است که به طور خاص برای سیستم های بدون سرنشین هوشمند طراحی شده است. از ویژگی های اصلی آن می توان به کنترل گیمبال/دوربین، ذخیره سازی ویدئو، پخش جریانی، تشخیص هدف، شناسایی و ردیابی اشاره کرد. هدف آن ارائه به توسعه دهندگان سیستم های بدون سرنشین هوشمند با قابلیت های پردازش بینایی با کارایی بالا، بسیار قابل اعتماد، ساده و با ویژگی های غنی است. این مدل از آموزش YOLO برای عملکرد ردیابی خودرو با نقطه و کلیک پشتیبانی می کند.
سیستم ایستگاه زمینی پرومتئوس
ایستگاه زمینی Prometheus یک رابط انسان و ماشین است که با استفاده از Qt بر اساس سیستم Prometheus توسعه یافته است. از ارتباطات TCP/UDP برای ساده سازی پیکربندی ارتباطات چند ماشینی استفاده می کند. ایستگاه زمینی کاربران را قادر میسازد تا به سرعت عملکردهای مختلف سیستم Prometheus را تکرار کنند، و امکان نظارت در زمان واقعی وضعیت پهپاد، و همچنین ویژگیهایی مانند عملیات فرمان برخاستن، فرود، و کنترل موقعیت با یک کلیک را فراهم میکند.
برنامه های کاربردی
-
تحقیقات علمی و توسعه هوش مصنوعی
- تست الگوریتم هوش مصنوعی
- تجزیه و تحلیل داده های حسگر پیشرفته
- پردازش و ردیابی تصویر در زمان واقعی
-
کاربردهای صنعتی
- نقشه برداری و ناوبری دقیق در محیط های پیچیده
- شناسایی و اجتناب از موانع در تدارکات و انبارداری
- بازرسی زیرساخت ها مانند خطوط برق و خطوط لوله
-
کاربردهای تحصیلی و آموزشی
- برنامه نویسی ثانویه برای تحقیقات هوش مصنوعی مبتنی بر ROS
- نمایش ها و آزمایش های آزمایشگاهی
- آموزش ناوبری خودران با پهپاد
-
راهکارهای شهر هوشمند
- بازسازی فضایی سه بعدی برای برنامه ریزی شهری
- نظارت و مدیریت ترافیک
- نظارت و تجزیه و تحلیل محیطی
-
توسعه سفارشی
- نمونه سازی برای کاربردهای صنعتی تخصصی
- تست و ادغام قطعات سخت افزاری و نرم افزاری جدید
-
واکنش به بلایا و پایش محیطی
- بازرسی و پایش هوایی در مناطق حادثه دیده
- جمع آوری داده های زیست محیطی برای تحقیق و سیاست گذاری
P600 انعطافپذیری و عملکرد بینظیری را ارائه میکند و محققان، مهندسان و توسعهدهندگان را قادر میسازد تا پروژههای پیچیده را در سناریوهای مختلف اجرا کنند.
Related Collections







