







Drone de recherche scientifique P600 Drone - ROS AI Programmation secondaire expérimentale Plate-forme de développement industriel Studio Lab Drone Kit de bricolage
Drone de recherche scientifique P600 Drone - ROS AI Programmation secondaire expérimentale Plate-forme de développement industriel Studio Lab Drone Kit de bricolage
RCDrone
Impossible de charger la disponibilité du service de retrait
Aperçu
Le Drone de recherche scientifique P600 est une plateforme de pointe conçue pour la recherche scientifique, le développement industriel et l'expérimentation en IA. Dotée d'un processeur hautes performances Module informatique NVIDIA Jetson Orin NX, il livre Puissance de calcul de 100 TOPS, ce qui le rend idéal pour les applications d'IA avancées. Ce drone dispose d'un Zoom optique 40x caméra à cardan pour l'imagerie haute résolution, LiDAR 3D SLAM pour une cartographie précise, et Positionnement RTK pour une précision au centimètre près. logiciel Prometheus V2 intégré et Bibliothèque de vision SpireCV prend en charge la programmation secondaire, ce qui en fait un outil polyvalent pour les développeurs. Avec un temps de vol allant jusqu'à 21 minutes, un Axe diagonal de 600 mm, et un robuste Poids au décollage de 4,05 kg, le P600 est optimisé pour les environnements de recherche et développement dynamiques.
Caractéristiques
Aéronef
| Attribut | Détails |
|---|---|
| Type d'avion | Quadricoptère |
| Poids au décollage | Environ 4,05 kg (batterie incluse) |
| Distance de l'axe diagonal | 600 mm |
| Dimensions | Longueur 469 mm, Largeur 469 mm, Hauteur 400 mm |
| Temps de vol stationnaire maximal | Environ 21 min |
| Précision du vol stationnaire | RTK : ± 0,015 m (horizontale), ± 0,01 m (verticale) LiDAR 3D SLAM : ±0,2 m (horizontal), ±0,1 m (vertical) |
| Température de fonctionnement | 6°C ~ 40°C |
| Puce MCU principale | STM32H743VIT6 / 216 MHz / 2 Mo de mémoire de programme / 512 Ko de mémoire de données |
| Unité de mesure inertielle | ICM20689 |
| Baromètre | BMP388 |
| MTD | AT24C64 |
| Interfaces E/S | PX4IO-V2 intégré, prend en charge 8Interfaces PWM, 1Interface RC (prend en charge SBus, PPM, DSM) Interfaces externes : 3UART (GH1.25 6 broches), 1CAN (GH1.25 4 broches), interface USB de contrôle de vol (type C) |
Ordinateur de bord
| Attribut | Détails |
|---|---|
| Nom | Ordinateur de bord Allspark-Orin NX |
| Modèle | IA160_V1 |
| Poids | Environ 188 g |
| Dimensions | 102,5 mm × 62,5 mm × 31 mm (ventilateur inclus) |
| Processeur | Carte graphique NVIDIA Jetson Orin NX |
| Mémoire | 16 Go LPDDR5 |
| Puissance de calcul | 100 TOPS |
| GPU | GPU intégré à 32 cœurs Tensor de l'architecture NVIDIA Ampere à 1024 cœurs |
| Processeur | Processeur 8 cœurs Arm® Cortex®-A78AE v8.2 64 bits (2 Mo L2 + 4 Mo L3) |
| Disque SSD | 128 Go (M.2 interfaces, extensibles) |
| Ethernet | 100 Mbps x2 (1 port Ethernet dédié, 1 interchangeable) |
| Wi-Fi | 5G |
| Afficher | Micro HDMI (1920*1080P) |
| Ports USB | USB 2.0 : 1 x Type-A, 1 x Type-C USB 2.0 : OTG x1 |
| Alimentation électrique | 10~26V à 3A |
Batterie d'alimentation
| Attribut | Détails |
|---|---|
| Modèle | LPB610HV |
| Capacité | 10000 mAh |
| Poids de la batterie | 1,2 kg |
| Tension de fonctionnement | 22 V à 26,1 V |
| Tension de stockage | 23,1 V |
| Dimensions | Longueur 180 mm, Largeur 90 mm, Hauteur 63 mm |
Télécommande
| Attribut | Détails |
|---|---|
| Modèle | H16 |
| Chaînes | 16 |
| Fréquence | 2,400 à 2,483 GHz |
| Tension de fonctionnement | 4,2 V |
| Batterie | 20000 mAh |
| Port de chargement | Type C 9 V-2 A |
| Poids | 1034 g |
| Dimensions | Longueur 272 mm, largeur 183 mm, hauteur 94 mm |
Lien de communication
| Attribut | Détails |
|---|---|
| Modèle | R16 |
| Distance de communication | Environ 600 mètres, bande passante 3,5 Mbps |
| Tension de fonctionnement | 7,2 V à 72 V |
| Interfaces | 2UART, 1Ethernet, 1HDMI, 1Type C |
| Dimensions | Longueur 76 mm, largeur 69 mm, hauteur 11 mm |
Caméra à cardan
| Attribut | Détails |
|---|---|
| Modèle | GX40 |
| Dimensions du cardan | Longueur 85,8 mm, largeur 86 mm, hauteur 129,3 mm |
| Dimensions du GCU | Longueur 45,4 mm, largeur 40 mm, hauteur 13,5 mm |
| Poids du cardan | 405 g |
| Poids du GCU | 18,6 g |
| Tension de fonctionnement | 14 V à 53 V |
| Protocole de diffusion en continu | RTSP (par défaut) |
| Format d'encodage | H.264 / H.264H / H.264B / H.265 / MJPEG |
| Résolution | - 4K30fps - 1080P@30fps - SCGA (12801024) à 30 images par seconde <br> - 1.3M (1280960) à 30 images par seconde - 720P@30fps |
| Débit binaire | 0,25 Mbps ~ 10 Mbps @ H.265, 0,5 Mbps ~ 16 Mbps @ H.264 |
Lentille
| Attribut | Détails |
|---|---|
| Taper | Objectif à zoom optique |
| Distance focale | 4,8 à 48 mm |
| Ouverture (F/NO) | f1.7~f3.2 |
| Champ de vision diagonal (D) | 67,2°~7,6° |
| Champ de vision vertical (V) | 36,1°~3,7° |
| Champ de vision horizontal (H) | 60,2°~6,6° |
| Rapport de zoom optique | 10x |
Capteur d'images
| Attribut | Détails |
|---|---|
| Type de capteur | CMOS |
| Pixels effectifs | 8,29 M |
| Taille du capteur | 1/2,8'' |
| Taille des pixels | 1,45 × 1,45 (µm) |
| Vitesse d'obturation électronique | 1~1/30000s |
Illuminateur
| Attribut | Détails |
|---|---|
| Taper | Laser |
| Longueur d'onde | 850±10 nm |
| Pouvoir | 0,8 W |
| Distance d'éclairage | ≤200 m |
RTK
| Attribut | Détails |
|---|---|
| Modèle | M15-RTK |
| Poids | 90 g |
| Dimensions | Longueur 80 mm, Largeur 50 mm, Hauteur 20 mm |
| Types de satellites pris en charge | BDS/GPS/GLONASS/QZSS |
| Alimentation électrique | 9~36V (12V recommandé) |
| Connecteur d'antenne | SMA-F |
| Ports fonctionnels | UARTx2, CANx1, USB2.0x1 |
Chargeur
| Attribut | Détails |
|---|---|
| Modèle | C1-XR |
| Tension d'entrée CA | 100~240V |
| Tension d'entrée CC | 11 à 18 V |
| Dimensions | Longueur 130 mm, largeur 115 mm, hauteur 61 mm |
| Poids | 380 g |
| Courant de charge | 0.1A~10A |
| Cellules de batterie prises en charge | 1 à 6 cellules |
LiDAR 3D
| Attribut | Détails |
|---|---|
| Modèle | MID360 |
| Longueur d'onde du laser | 905 nm |
| Portée de détection | 40 m (à 105 % de réflectivité) |
| Champ de vision (FOV) | Horizontal : 360°, Vertical : -7°~52° |
| Portée minimale | 0,1 m |
| Taux de nuage de points | 10 Hz (typique) |
| Points par seconde | 200 000 points/s |
| Interface de données | Ethernet 100 BASE-TX |
| Synchronisation des données | IEEE 1588-2008 (PTP v2), GPS |
| IMU interne | ICM40609 |
| Alimentation électrique | 7 à 27 V |
| Dimensions | 65 mm (L) x 65 mm (P) x 60 mm (H) |
| Poids | 115 g |
| Température de fonctionnement | -20°C ~ 55°C |
Paramètres du logiciel
Ordinateur de bord
| Attribut | Détails |
|---|---|
| Modèle | Jetson Orin NX |
| Système opérateur | Ubuntu 20.04 |
| Nom d'utilisateur | amov |
| Mot de passe | amov |
| Version L4T | 35.2.1 |
| Version Jetpack | 5.1 |
| Version CUDA | 11.4.315 |
| Kit de développement logiciel Realsense | 2.50.0 |
| Version ROS | noétique |
| Version OpenCV | 4.7.0 |
| ROS de Realsense | 2.3.2 |
Liste des paquets
| Nom | Spécification/Modèle | Quantité/Unité |
|---|---|---|
| Avion principal P600 | P600-Allpark2-RTK-GX40-S3 | 1 ensemble |
| Borne de terre M15-RTK | M15-RTK | 1 pièce |
| Antenne champignon GNSS | Antenne champignon | 1 pièce |
| Câble d'extension d'antenne GNSS | Câble d'extension d'antenne | 1 câble |
| Télécommande H16 | H16 | 1 unité |
| Batterie d'alimentation 6S 10000mAh | 6S 10000mAh | 1 ensemble |
| Batterie au lithium 3S 4000 mAh | 3S 4000mAh | 1 ensemble |
| Chargeur d'équilibrage intelligent | C1-XR | 1 unité |
| Câble réseau | 1,5 m | 1 câble |
| Corde de sécurité | 50 m | 1 paquet |
| Support HDMI | / | 1 pièce |
| Câble adaptateur HDMI | / | 1 pièce |
| Configuration de l'ordinateur | / | 1 pièce |
| Plaque de chute 2D | 35×35 cm | 1 pièce |
| Affaire de l'aviation | 740×540×510 mm | 1 ensemble |
| Pack de câbles accessoires | / | 1 paquet |
| Certificat | / | 1 feuille |
| Liste de contrôle des tests de fonctionnement | / | 1 feuille |
Détails
Plateforme de développement de drones de recherche scientifique Prometheus 600
Le Plateforme de développement de drones de recherche scientifique Prometheus 600 (appelé P600) est le produit de quatrième génération de la série P600. Il intègre en profondeur deux technologies de base, Prométhée et SpireCV, et est équipé d'une caméra à cardan avec zoom optique 40x. Cette configuration permet la détection et le suivi de cibles à longue distance, l'atterrissage autonome à haute altitude et les missions de croisière aérienne.
Le système prend en charge le LiDAR SLAM 3D avec Rapide-lio, réalisant une cartographie SLAM 3D de haute précision. De plus, il dispose de Algorithme de collaboration multi-agents EGO-Swarm, permettant des applications dans divers scénarios tels que la reconstruction spatiale 3D intérieure et extérieure et l'évitement d'obstacles lors de la navigation par drone.
Ces capacités avancées sont complétées par la Station terrestre professionnelle Prometheus, qui fournit un retour visuel en temps réel, une surveillance des opérations et un réglage dynamique des paramètres, ce qui permet aux développeurs de maîtriser et d'accélérer plus facilement le développement secondaire.

Trois versions du drone P600

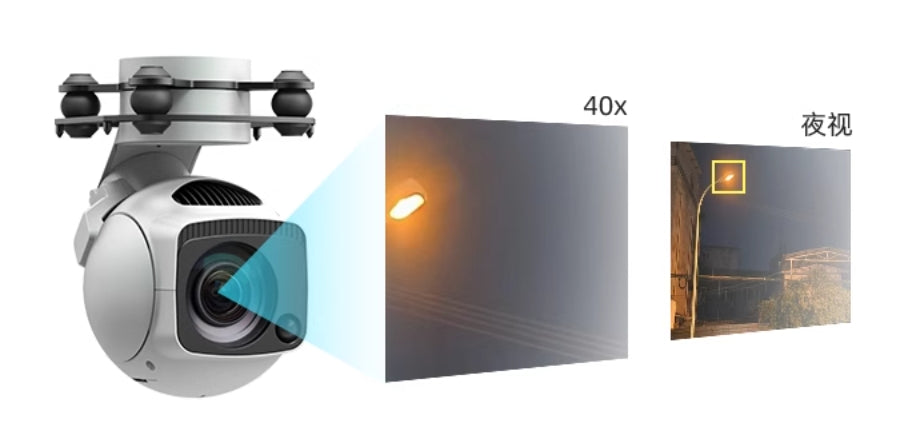
Contrôle flexible du cardan optique-électronique
La caméra à cardan GX40 prend en charge le contrôle multi-scénarios et intègre une télécommande en chaîne pour permettre la recherche de cibles pendant la navigation par points de cheminement. Bibliothèque de vision SpireCV, il facilite la détection et le suivi des cibles, réalisant un verrouillage en temps réel du cardan sur la cible.
- Éclairage nocturne
- Détection et suivi de cibles

Clic et suivi ciblés
En utilisant le Algorithme de détection YOLOv5 et en exploitant l'ensemble de données universel COCO, les cibles sont détectées et suivies. Algorithme de suivi Nanotrack se verrouille sur les cibles sélectionnées pour le suivi. Sans changement de conditions, des cibles jusqu'à 30 mètres de distance peuvent être identifiées et suivies. Zoom optique 40x et zoom électronique, la détection et le suivi de cibles à longue distance sont réalisés. Pendant le suivi du drone, le Station terrestre professionnelle Prometheus permet des commutateurs de suivi de cible dynamiques basés sur la distance (la valeur par défaut est de 10 mètres).
- Suivi à 30 m
- Suivi à 20 m
- Suivi à 10 m

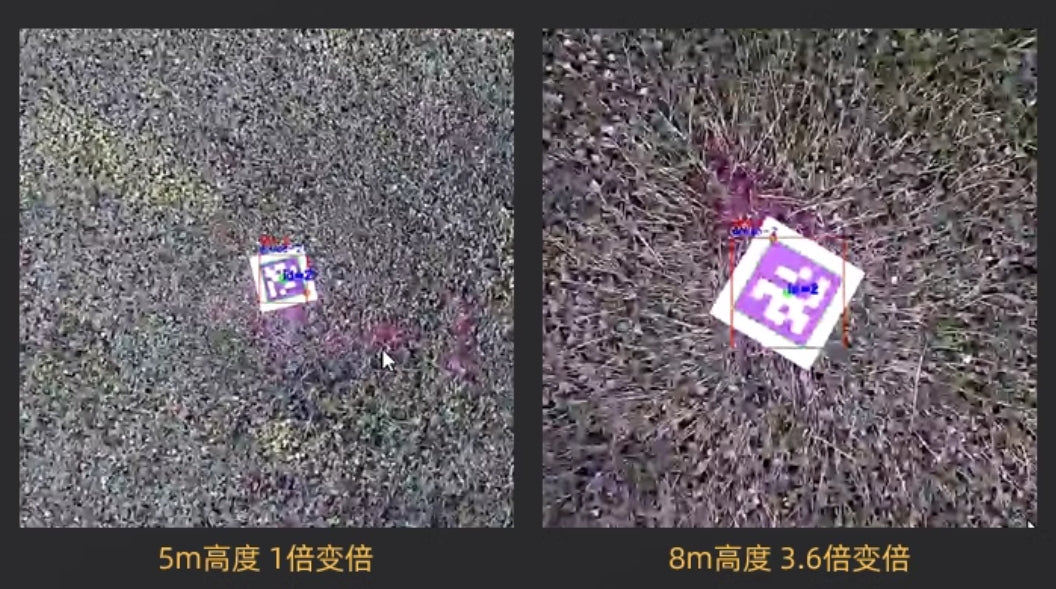
Atterrissage guidé par code QR
En utilisant le Bibliothèque de vision SpireCV, la détection précise et l'estimation de la position des codes QR sont obtenues. Le GX40 peut effectuer un atterrissage guidé de précision sur des codes QR à différentes altitudes. Le centre de la caméra à cardan s'aligne avec le centre du code QR dans une marge d'erreur de 30 cm.
- Altitude de 5 m, zoom 1x
- 8 m d'altitude, zoom 3,6x
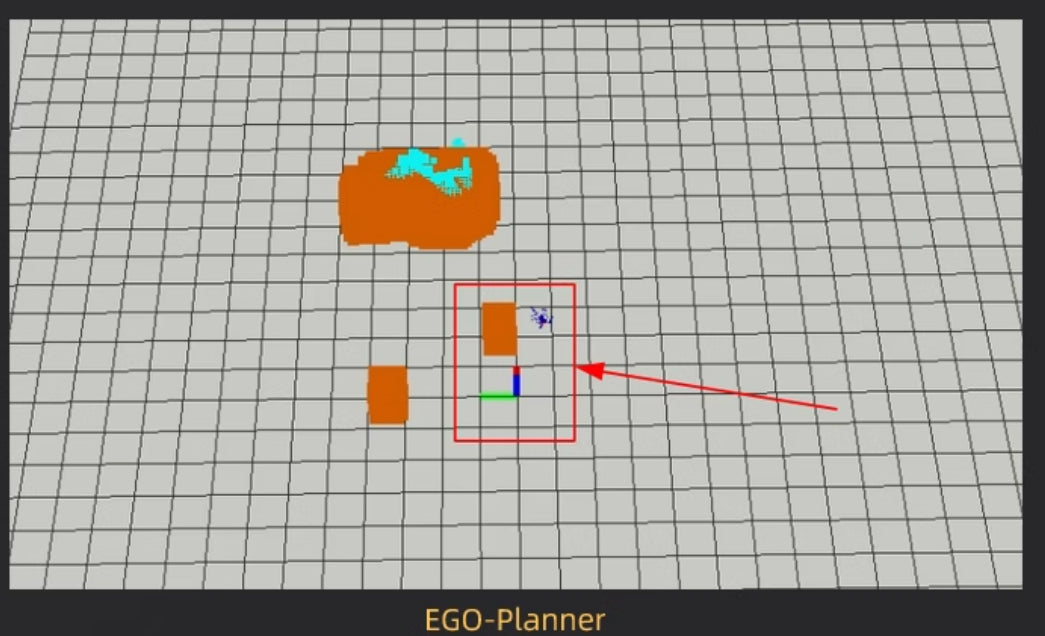
Planificateur EGO
Prend en charge le Algorithme de planification de chemin EGO-Planner et fournit Algorithme de mappage OctomapAssocié à la station terrestre professionnelle, il permet une planification de trajectoire dynamique 3D autonome.
Applications de contrôle de drones stables et fiables
Le drone P600 est équipé d'un équipement RTK de haute précision, permettant un vol stationnaire de haute précision en extérieur avec une précision horizontale jusqu'à 1 cm et une précision verticale jusqu'à 1,5 cm. Module de contrôle du système logiciel Prometheus, il permet un contrôle précis du drone.
Le module de contrôle du drone agit comme un « pont » entre les programmes logiciels et le drone, offrant plusieurs états de contrôle tels que le vol stationnaire en position initiale, le vol stationnaire en position actuelle, l'atterrissage et le mouvement. Ceux-ci comprennent six modes de contrôle : la position habituelle du système, la vitesse, le contrôle intégré de la position et de la vitesse et le mode de contrôle de la trajectoire. Au total, il propose sept modes de contrôle.

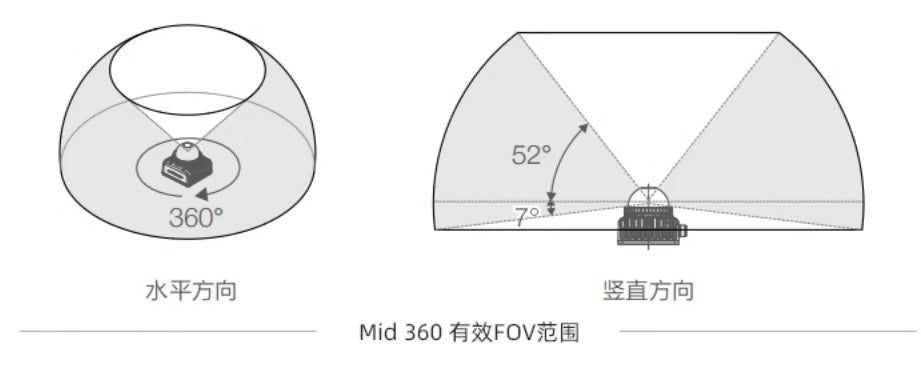
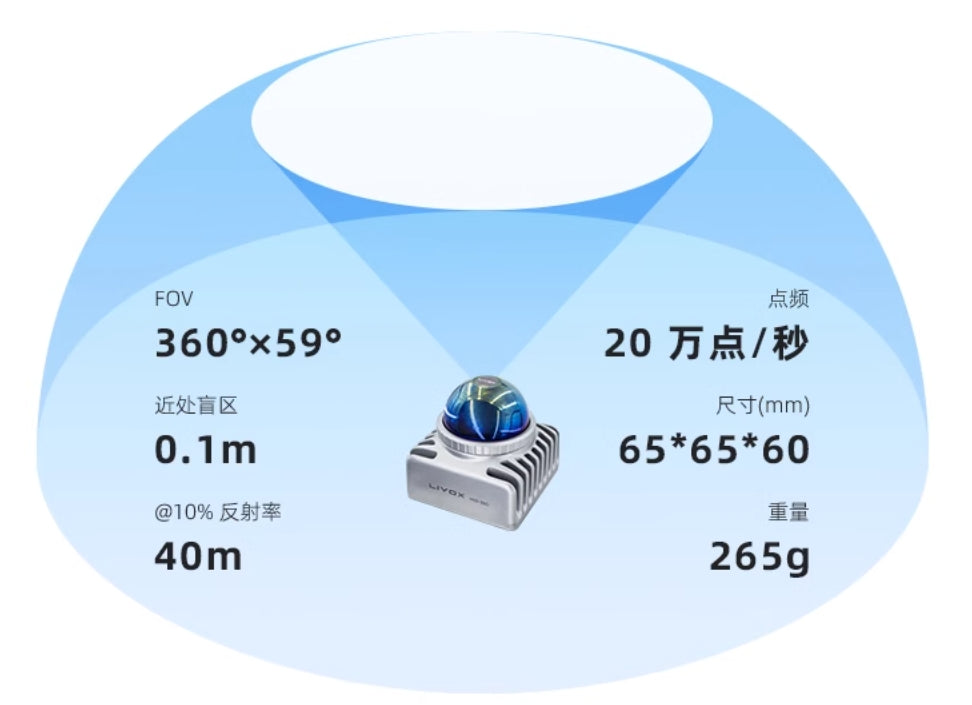
LiDAR 3D Mid-360
- Faible zone aveugle | Champ de vision large | Application multi-scénarios
Le Milieu 360 dispose d'un Champ de vision horizontal à 360° et un champ de vision vertical maximal de 59°Lorsque la réflectivité de l'objet cible est de 10 %, la portée de détection maximale peut atteindre 40 mètres, et la plage de zone aveugle est aussi petite que 10 mètresIl s'adapte à divers environnements complexes tels que la faible luminosité et la forte luminosité.
Equipé du module Mid-360, le Drone P600 réalise une couverture panoramique de la zone aveugle, garantissant un fonctionnement transparent des drones dans des environnements multi-scénarios.
- Descriptions des diagrammes :
- Direction horizontale : 360°
- Direction verticale : champ de vision maximal de 52°

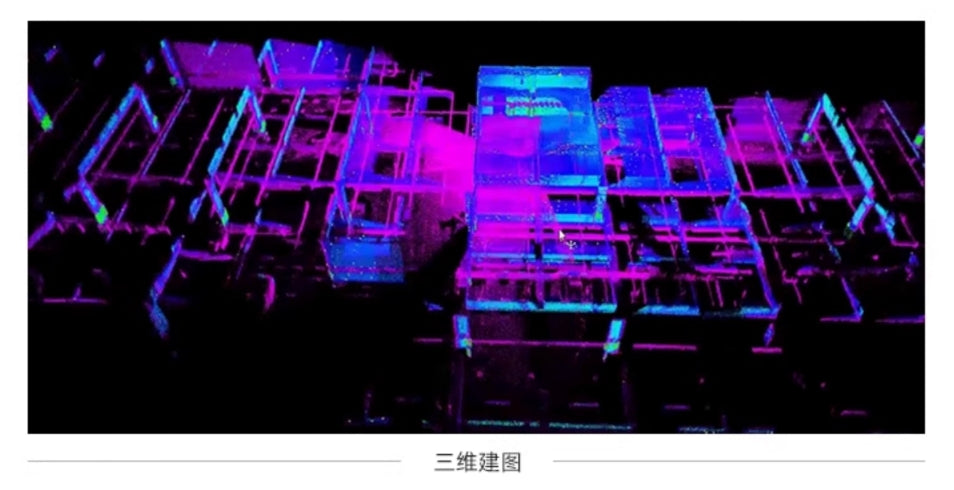
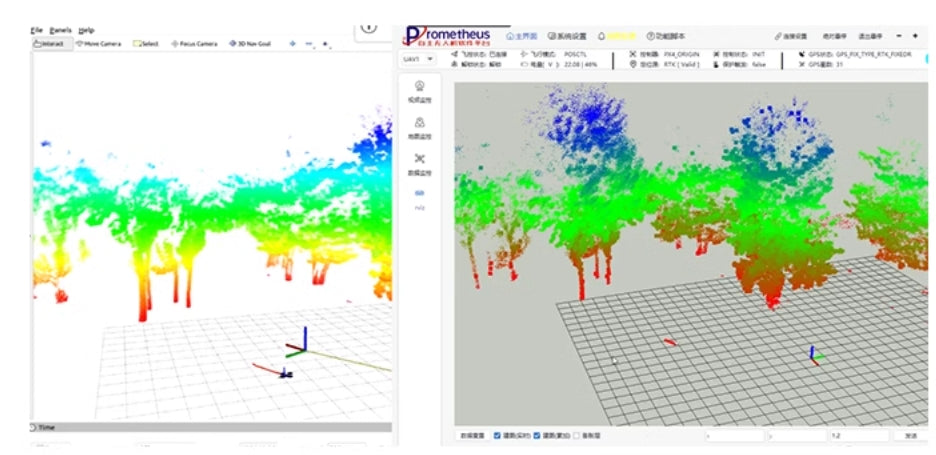
Cartographie environnementale 3D rapide et précise
Le Drone P600 est équipé de capacités avancées de détection environnementale, lui permettant de collecter rapidement des données environnementales environnantes pendant le vol. Ces données sont traitées en temps réel pour générer un Carte environnementale 3D, offrant une connaissance spatiale précise et un support de navigation pour diverses tâches.
Planification de trajectoire EGO-Swarm pour la navigation et l'évitement des obstacles
Le Mid360 publie des données de nuages de points et des données de localisation, combinées avec les Algorithme de planification de chemin EGO-Swarm, améliorant considérablement la capacité du drone à s'adapter de manière autonome aux changements environnementaux dynamiques. Il peut analyser et répondre en temps réel aux obstacles pendant le mouvement et ajuster dynamiquement la cible de suivi avec une vitesse maximale de 2 m/sCela garantit une flexibilité et une adaptabilité exceptionnelles dans des scénarios opérationnels inconnus et complexes.
Cette fonctionnalité améliore considérablement l'efficacité des tâches du drone, lui permettant d'accomplir efficacement et avec précision une variété de tâches
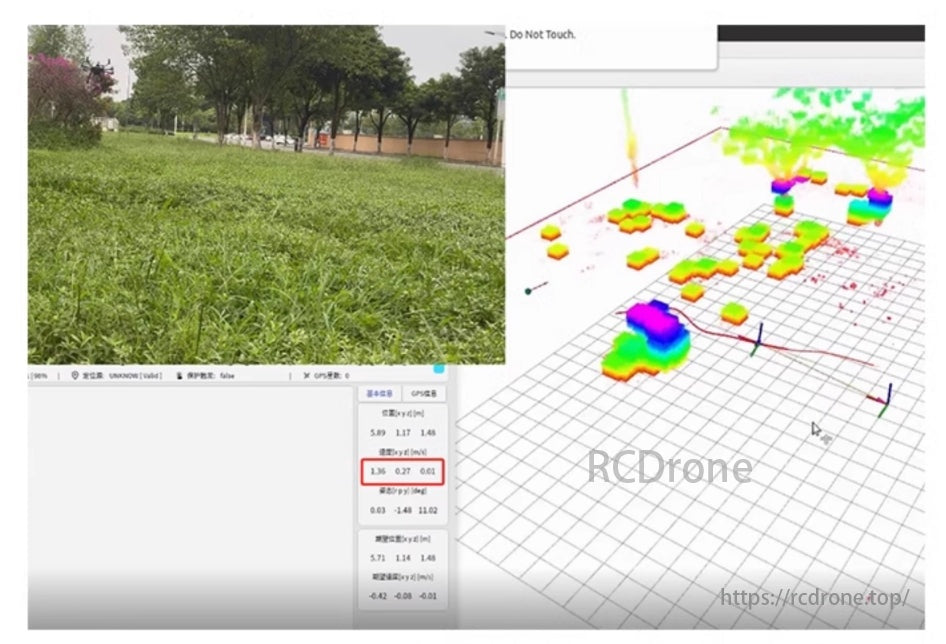
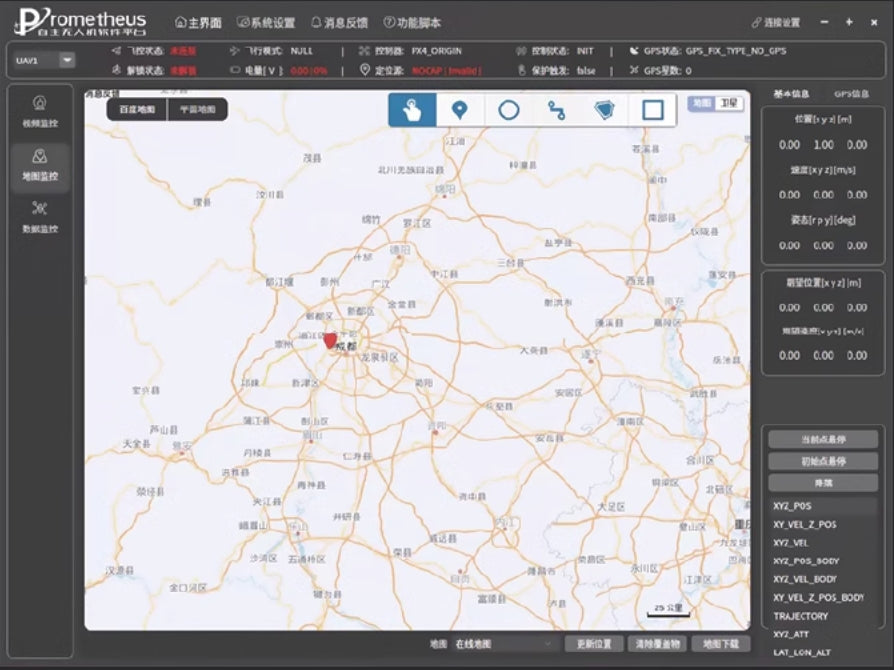
Interaction avec les drones de la station terrestre professionnelle Prometheus
- Interaction avec la station terrestre
Ceci présente l'interface et les capacités d'interaction du Station terrestre professionnelle Prometheus, permettant une communication et un fonctionnement transparents avec le drone grâce à une cartographie environnementale 3D.
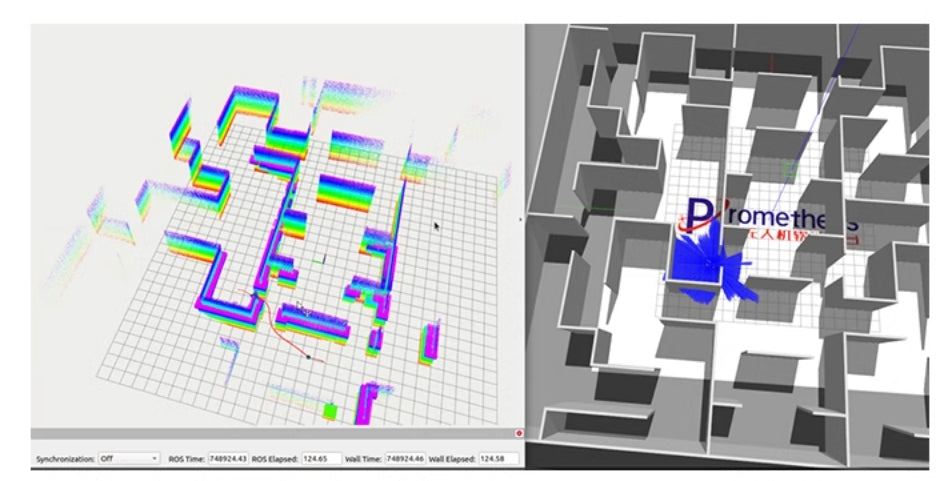
Démonstration de la fonction de simulation intégrée
- Simulation de trajectoire LiDAR SLAM 3D et EGO-Swarm
Ceci illustre la simulation de LiDAR 3D SLAM et Planification du chemin d'EGO-Swarm au sein d'un environnement structuré, présentant les capacités du système dans une démonstration contrôlée.
Caractéristiques matérielles
Cadre de drone
Le Kedway DP1000 La plate-forme de drone de qualité industrielle utilise un FOC (Contrôle Orienté Champ) Système d'alimentation permettant au moteur de tourner de manière stable, avec un faible bruit, une efficacité élevée et une réponse dynamique rapide. L'ensemble du système de drone atteint un état « prêt à voler » avec une excellente qualité matérielle, garantissant des performances de vol stables. Il prend en charge endurance ultra longue (70 minutes sans charge utile), tandis que le Drone P600 nécessite environ 24 minutes pour la stabilisation pendant le positionnement.

Unité de calcul puissante
- Unité de micro-informatique de pointe Allspark, équipé du Module NVIDIA Orin NX, fournissant Puissance de calcul à virgule flottante de 100 TOPS.
- Taille compacte, poids léger, forte compatibilité système et Calcul haute performance accéléré par GPU.
- Pré-installé avec tous les environnements de développement, prêt à l'emploi, améliorant l'efficacité du développement secondaire.
- Dimensions: 102,5 mm × 62.5 mm × 31 mm

Contrôleur de transmission d'images intégré
Un télécommande de drone de qualité industrielle combinant données, image et contrôle en un seul.
- Bande de fréquence: 2,4-2,483 GHz
- Distance de transmission maximale: 30 km
- Qualité de l'image: 1080P
- Autonomie de la batterie:8 à 15 heures de fonctionnement continu
Pendant le fonctionnement du drone, les utilisateurs peuvent surveiller les informations du drone en temps réel, visualiser les images de la caméra et contrôler simultanément le drone avec le joystick, garantissant ainsi une opération de vol entièrement visualisée.

RTK haute précision à double antenne
Le drone est équipé d'un Module de positionnement RTK-GNSS, qui utilise une technologie de positionnement différentiel de phase porteuse rapide et des algorithmes de suppression des trajets multiples pour fournir une précision de positionnement au centimètre près pour les drones. Il peut recevoir simultanément des données RTCM de plusieurs stations de référence au sol, prenant en charge les calculs RTK de base courte, moyenne et longue.
Avec un multilingue intégré Interface graphique Web, il permet une configuration sans seuil et un affichage des données visualisées ainsi que des processus de mise à niveau. Le récepteur dispose également d'une interface de configuration de page Web conviviale, réduisant considérablement la barrière opérationnelle. Il offre des interfaces riches et est adaptable à divers scénarios d'application, offrant des performances exceptionnelles en matière de positionnement précis.

Cardan optique-électronique 40x
Equipé d'un cardan non orthogonal à 3 axes de haute précision, il dispose d'une caméra à zoom optique 10x de 8,29 mégapixels associée à une technologie de zoom numérique, permettant un grossissement jusqu'à 40x. Il peut produire 4K@30FPS video diffuse des flux sur le réseau. De plus, il est équipé d'un module d'éclairage laser, permettant d'obtenir des images claires même dans des environnements complètement sombres.
LiDAR 3D MID 360
Le Mid-360 est un capteur de détection et de télémétrie laser économique, sûr et fiable. Il est largement utilisé dans des domaines tels que les robots logistiques, les robots industriels et les villes intelligentes, prenant en charge des fonctions telles que la cartographie, le positionnement, l'identification et l'évitement d'obstacles. Le Mid-360 peut détecter des objets aussi près que 0,1 mètre et jusqu'à 100 mètres. Il présente une taille compacte, un large champ de vision, une haute résolution, une grande fiabilité et une IMU intégrée.
Caractéristiques:
- Champ de vision: 360° × 59°
- Distance de détection minimale: 0,1 m
- Portée (à 10 % de réflectivité): 40 m
- Fréquence ponctuelle: 200 000 points/seconde
- Dimensions (mm): 65 × 65 × 60
- Poids: 265 g
Fonctionnalités du logiciel
Système logiciel Prometheus V2
La plateforme de développement est basée sur ROS et le framework open source Prometheus, offrant de riches fonctionnalités et un grand nombre d'interfaces de développement secondaires pour une personnalisation efficace. Elle fournit des interfaces pour l'état du drone et les données des capteurs, notamment les informations de localisation, les modes de vol, l'état de la batterie et l'IMU. De plus, elle offre des interfaces de contrôle pour la position, la vitesse, l'accélération et l'attitude, ainsi que des exemples de programmes pour l'utilisation de l'interface de développement. Le drone comprend également des fonctions intégrées d'inspection de sécurité de vol (pas d'évitement d'obstacles), permettant un atterrissage automatique dans des situations anormales pour réduire les risques de collision, rendant le développement plus sûr.

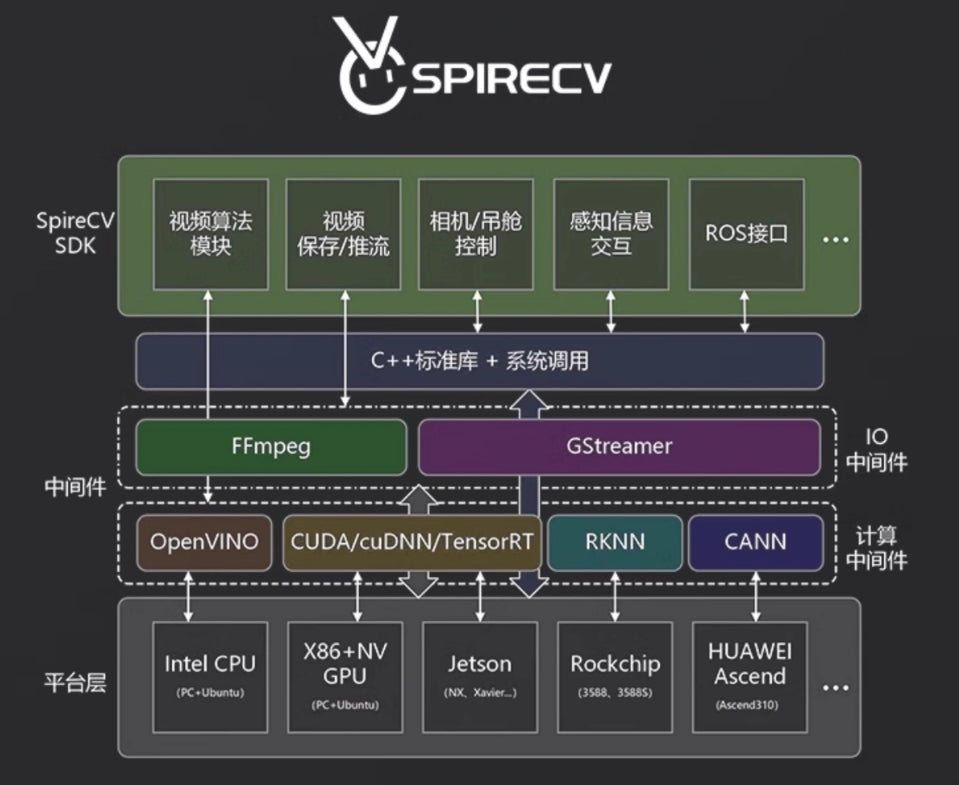
Bibliothèque de vision SpireCV
Basé sur la bibliothèque de vision SpireCV, il s'agit d'un SDK de traitement d'images en temps réel embarqué conçu spécifiquement pour les systèmes intelligents sans pilote. Ses principales fonctionnalités comprennent le contrôle de la nacelle/caméra, le stockage vidéo, la diffusion en continu, la détection, la reconnaissance et le suivi des cibles. Il vise à fournir aux développeurs de systèmes intelligents sans pilote des capacités de traitement de la vision hautes performances, extrêmement fiables, simples et riches en fonctionnalités. Ce modèle prend en charge la formation YOLO pour la fonctionnalité de suivi de véhicule par pointer-cliquer.
Système de station terrestre Prometheus
La station au sol Prometheus est une interface homme-machine développée à l'aide de Qt, basée sur le système Prometheus. Elle utilise la communication TCP/UDP pour simplifier la configuration de la communication multi-machine. La station au sol permet aux utilisateurs de reproduire rapidement diverses fonctions du système Prometheus, offrant une surveillance en temps réel de l'état du drone, ainsi que des fonctionnalités telles que le décollage en un clic, l'atterrissage et les opérations de commande de contrôle de position.
Applications
-
Recherche scientifique et développement de l'IA
- Test d'algorithme d'IA
- Analyse avancée des données des capteurs
- Traitement et suivi d'images en temps réel
-
Applications industrielles
- Cartographie et navigation de précision dans des environnements complexes
- Détection et évitement d'obstacles dans la logistique et l'entreposage
- Inspection des infrastructures telles que les lignes électriques et les pipelines
-
Utilisations académiques et éducatives
- Programmation secondaire pour la recherche en IA basée sur ROS
- Démonstrations et expériences en laboratoire
- Formation à la navigation autonome par drone
-
Solutions pour villes intelligentes
- Reconstruction spatiale 3D pour l'urbanisme
- Surveillance et gestion du trafic
- Surveillance et analyse environnementale
-
Développement personnalisé
- Prototypage pour applications industrielles spécialisées
- Test et intégration de nouveaux composants matériels et logiciels
-
Intervention en cas de catastrophe et surveillance environnementale
- Inspection et surveillance aériennes dans les zones sinistrées
- Collecte de données environnementales pour la recherche et l'élaboration des politiques
Le P600 offre une flexibilité et des fonctionnalités inégalées, permettant aux chercheurs, ingénieurs et développeurs d'exécuter des projets complexes dans divers scénarios.
Related Collections







