







P600 drone pesquisa científica drone-ros ai experimental programação secundária plataforma de desenvolvimento industrial estúdio laboratório drone kit diy
P600 drone pesquisa científica drone-ros ai experimental programação secundária plataforma de desenvolvimento industrial estúdio laboratório drone kit diy
RCDrone
Não foi possível carregar a disponibilidade de recolha
Visão geral
O Drone de Pesquisa Científica P600 é uma plataforma de ponta projetada para pesquisa científica, desenvolvimento industrial e experimentação de IA. Equipado com um alto desempenho Módulo de computação NVIDIA Jetson Orin NX, ele entrega 100 TOPS de poder de computação, tornando-o ideal para aplicações avançadas de IA. Este drone apresenta um Zoom óptico de 40x câmera gimbal para imagens de alta resolução, 3D LiDAR SLAM para mapeamento preciso e Posicionamento RTK para precisão de nível centimétrico. software Prometheus V2 integrado e Biblioteca de visão SpireCV suporta programação secundária, tornando-se uma ferramenta versátil para desenvolvedores. Com um tempo de voo de até 21 minutos, um Eixo diagonal de 600 mm, e um robusto Peso de decolagem de 4,05 kg, o P600 é otimizado para ambientes dinâmicos de pesquisa e desenvolvimento.
Especificações
Aeronave
| Atributo | Detalhes |
|---|---|
| Tipo de aeronave | Quadricóptero |
| Peso de decolagem | Aprox. 4,05 kg (incluindo bateria) |
| Distância do eixo diagonal | 600 milímetros |
| Dimensões | Comprimento 469 mm, Largura 469 mm, Altura 400 mm |
| Tempo máximo de pairar | Aproximadamente 21 min |
| Precisão de pairar | RTK: ±0,015 m (horizontal), ±0,01 m (vertical) SLAM LiDAR 3D: ±0,2 m (horizontal), ±0,1 m (vertical) |
| Temperatura de operação | 6°C ~ 40°C |
| Chip MCU principal | STM32H743VIT6 / 216 MHz / armazenamento de programa de 2M / armazenamento de dados de 512 KB |
| UMI | ICM20689 |
| Barômetro | BMP388 |
| DMT | AT24C64 |
| Interfaces de E/S | PX4IO-V2 integrado, suporta 8Interfaces PWM, 1Interface RC (suporta SBus, PPM, DSM) Interfaces externas: 3UART (GH1.25 6 pinos), 1CAN (GH1.25 4 pinos), Interface USB de controle de voo (Tipo C) |
Computador de bordo
| Atributo | Detalhes |
|---|---|
| Nome | Computador de bordo Allspark-Orin NX |
| Modelo | IA160_V1 |
| Peso | Aprox. 188 g |
| Dimensões | 102,5 mm × 62,5 mm × 31 mm (incluindo ventoinha) |
| Processador | NVIDIA Jetson Orin NX |
| Memória | 16 GB LPDDR5 |
| Poder de computação | 100 TOPS |
| GPU | 32 núcleos tensores integrados de GPU de arquitetura NVIDIA Ampere de 1024 núcleos |
| CPU | CPU Arm® Cortex®-A78AE v8.2 de 8 núcleos e 64 bits (2 MB L2 + 4 MB L3) |
| SSD | 128 GB (M.2 interface, expansível) |
| Ethernet | 100 Mbps x2 (1 porta Ethernet dedicada, 1 intercambiável) |
| Wi-fi | 5G |
| Mostrar | Micro HDMI (1920*1080P) |
| Portas USB | USB2.0: Tipo A x1, Tipo C x1 USB 2.0: OTG x1 |
| Fonte de energia | 10~26V @ 3A |
Bateria de energia
| Atributo | Detalhes |
|---|---|
| Modelo | LPB610HV |
| Capacidade | 10000 mAh |
| Peso da bateria | 1,2 kg |
| Tensão de operação | 22 V~26,1 V |
| Tensão de armazenamento | 23,1 V |
| Dimensões | Comprimento 180 mm, Largura 90 mm, Altura 63 mm |
Controle remoto
| Atributo | Detalhes |
|---|---|
| Modelo | H16 |
| Canais | 16 |
| Freqüência | 2,400 ~ 2,483 GHz |
| Tensão de operação | 4,2 V |
| Bateria | 20000 mAh |
| Porta de carregamento | Tipo C 9V-2A |
| Peso | 1034 g |
| Dimensões | Comprimento 272 mm, Largura 183 mm, Altura 94 mm |
Link de comunicação
| Atributo | Detalhes |
|---|---|
| Modelo | R16 |
| Distância de comunicação | Aprox. 600 metros, largura de banda 3,5 Mbps |
| Tensão de operação | 7,2 V~72 V |
| Interfaces | 2UART, 1Ethernet, 1HDMI, 1Tipo C |
| Dimensões | Comprimento 76 mm, Largura 69 mm, Altura 11 mm |
Câmera Gimbal
| Atributo | Detalhes |
|---|---|
| Modelo | GX40 |
| Dimensões do Gimbal | Comprimento 85,8 mm, Largura 86 mm, Altura 129,3 mm |
| Dimensões da GCU | Comprimento 45,4 mm, Largura 40 mm, Altura 13,5 mm |
| Peso do cardan | 405 g |
| Peso GCU | 18,6 g |
| Tensão de operação | 14V~53V |
| Protocolo de streaming | RTSP (padrão) |
| Formato de codificação | H.264/H.264H/H.264B/H.265/MJPEG |
| Resolução | - 4K30 fps - 1080P@30fps - SCGA (12801024)@30fps <br> - 1.3M (1280960) a 30 fps - 720P@30fps |
| Taxa de bits | 0,[email protected], 0,[email protected] |
Lente
| Atributo | Detalhes |
|---|---|
| Tipo | Lente de zoom óptico |
| Distância focal | 4,8~48 mm |
| Abertura (F/NO) | f1.7~f3.2 |
| Campo de visão diagonal (D) | 67,2°~7,6° |
| Campo de visão vertical (V) | 36,1°~3,7° |
| Campo de visão horizontal (H) | 60,2°~6,6° |
| Taxa de zoom óptico | 10x |
Sensor de imagem
| Atributo | Detalhes |
|---|---|
| Tipo de sensor | CMOS |
| Pixels Efetivos | 8,29 milhões |
| Tamanho do sensor | 1/2,8'' |
| Tamanho do pixel | 1,45×1,45 (μm) |
| Velocidade do obturador eletrônico | 1~1/30000s |
Iluminador
| Atributo | Detalhes |
|---|---|
| Tipo | Laser |
| Comprimento de onda | 850±10 nm |
| Poder | 0,8 W |
| Distância de iluminação | ≤200 metros |
RTK
| Atributo | Detalhes |
|---|---|
| Modelo | M15-RTK |
| Peso | 90 g |
| Dimensões | Comprimento 80 mm, Largura 50 mm, Altura 20 mm |
| Tipos de satélite suportados | BDS/GPS/GLONASS/QZSS |
| Fonte de energia | 9~36V (12V recomendado) |
| Conector de antena | SMA-F |
| Portas Funcionais | UARTx2, CANx1, USB2.0x1 |
Carregador
| Atributo | Detalhes |
|---|---|
| Modelo | C1-XR |
| Tensão de entrada CA | 100~240V |
| Tensão de entrada CC | 11~18V |
| Dimensões | Comprimento 130 mm, Largura 115 mm, Altura 61 mm |
| Peso | 380 g |
| Corrente de carga | 0.1A~10A |
| Células de bateria suportadas | 1~6 células |
LiDAR 3D
| Atributo | Detalhes |
|---|---|
| Modelo | MID360 |
| Comprimento de onda do laser | 905 nm |
| Faixa de detecção | 40 m (com 105% de refletividade) |
| Campo de visão (FOV) | Horizontal: 360°, Vertical: -7°~52° |
| Alcance mínimo | 0,1 m |
| Taxa de Nuvem de Pontos | 10 Hz (típico) |
| Pontos por Segundo | 200.000 pontos/s |
| Interface de dados | Ethernet 100 BASE-TX |
| Sincronização de dados | IEEE 1588-2008 (PTP v2), GPS |
| IMU interna | ICM40609 |
| Fonte de energia | 7~27V |
| Dimensões | 65 mm (L) x 65 mm (P) x 60 mm (A) |
| Peso | 115 g |
| Temperatura de operação | -20°C ~ 55°C |
Parâmetros de software
Computador de bordo
| Atributo | Detalhes |
|---|---|
| Modelo | Jetson Orin NX |
| Sistema operacional | Ubuntu 20.04 |
| Nome de usuário | amo |
| Senha | amo |
| Versão L4T | 35.2.1 |
| Versão Jetpack | 5.1 |
| Versão CUDA | 11.4.315 |
| SDK Realsense | 2.50.0 |
| Versão ROS | noético |
| Versão OpenCV | 4.7.0 |
| Realsense ROS | 2.3.2 |
Lista de Pacotes
| Nome | Especificação/Modelo | Quantidade/Unidade |
|---|---|---|
| Aeronave principal P600 | P600-Allpark2-RTK-GX40-S3 | 1 conjunto |
| Terminal terrestre M15-RTK | M15-RTK | 1 peça |
| Antena GNSS cogumelo | Antena cogumelo | 1 peça |
| Cabo de extensão de antena GNSS | Cabo de extensão de antena | 1 cabo |
| Controle Remoto H16 | H16 | 1 unidade |
| Bateria de potência 6S 10000mAh | 6S 10000mAh | 1 conjunto |
| Bateria de lítio 3S 4000mAh | 3S 4000mAh | 1 conjunto |
| Carregador de balanceamento inteligente | C1-XR | 1 unidade |
| Cabo de rede | 1,5 m | 1 cabo |
| Corda de segurança | 50 metros | 1 pacote |
| Suporte HDMI | / | 1 peça |
| Cabo adaptador HDMI | / | 1 peça |
| Configuração do computador | / | 1 peça |
| Prato de queda 2D | 35×35 cm | 1 peça |
| Caso de aviação | 740×540×510 milímetros | 1 conjunto |
| Pacote de cabos acessórios | / | 1 pacote |
| Certificado | / | 1 folha |
| Lista de verificação de teste de função | / | 1 folha |
Detalhes
Plataforma de desenvolvimento de drones de pesquisa científica Prometheus 600
O Plataforma de desenvolvimento de drones de pesquisa científica Prometheus 600 (referido como P600) é o produto de quarta geração da série P600. Ele integra profundamente duas tecnologias principais, Prometeu e SpireCV, e é equipado com uma câmera gimbal com zoom óptico de 40x. Esta configuração permite detecção e rastreamento de alvos de longa distância, pouso autônomo de grandes altitudes e missões de cruzeiro aéreo.
O sistema suporta 3D LiDAR SLAM com Rápido-lio, alcançando mapeamento SLAM 3D de alta precisão. Além disso, ele apresenta o Algoritmo de colaboração multiagente EGO-Swarm, permitindo aplicações em vários cenários, como reconstrução espacial 3D interna e externa e prevenção de obstáculos durante a navegação por drones.
Estas capacidades avançadas são complementadas pela Estação terrestre profissional Prometheus, que fornece feedback visual em tempo real, monitoramento de operação e ajuste dinâmico de parâmetros, facilitando para os desenvolvedores dominar e acelerar o desenvolvimento secundário.

Três versões do drone P600

Controle flexível do Gimbal Óptico-Eletrônico
A câmera gimbal GX40 suporta controle multi-cenário e integra controle remoto baseado em cadeia para permitir a busca de alvos durante a navegação de waypoint. Usando o Biblioteca de visão SpireCV, facilita a detecção e o rastreamento de alvos, conseguindo o travamento do gimbal no alvo em tempo real.
- Iluminação noturna
- Detecção e rastreamento de alvos

Clique e rastreamento de destino
Usando o Algoritmo de detecção YOLOv5 e aproveitando o conjunto de dados universal COCO, os alvos são detectados e rastreados. Algoritmo de rastreamento Nanotrack trava em alvos selecionados para rastreamento. Sem mudanças nas condições, alvos a até 30 metros de distância podem ser identificados e rastreados. Por meio de Zoom óptico de 40x e zoom eletrônico, detecção e rastreamento de alvos de longa distância são alcançados. Durante o rastreamento de drones, o Estação terrestre profissional Prometheus permite comutações dinâmicas de rastreamento de alvos baseadas em distância (o padrão é 10 metros).
- Rastreamento a 30m
- Rastreamento a 20m
- Rastreamento a 10m

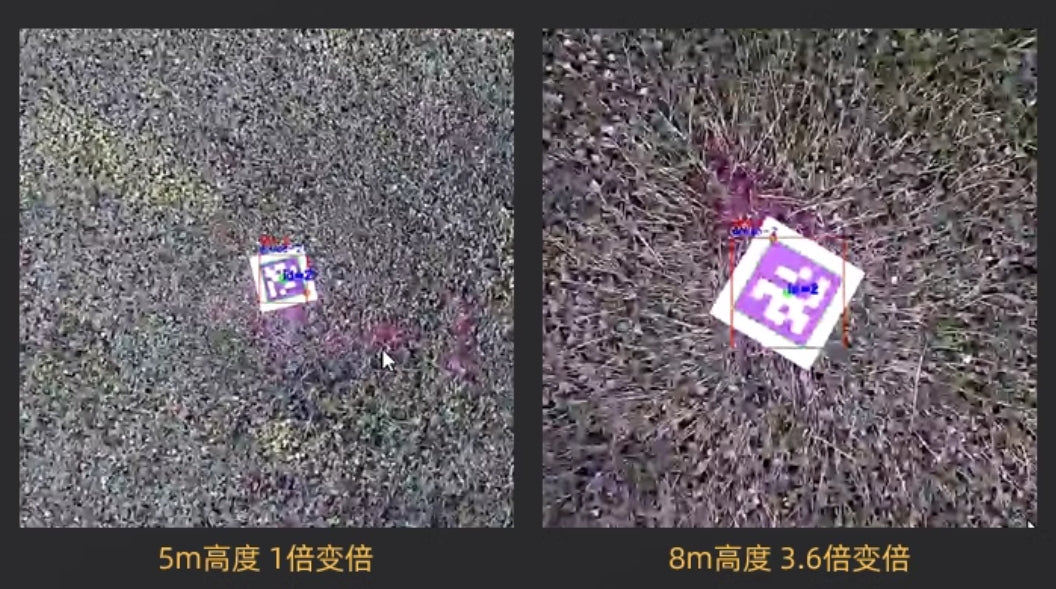
Aterrissagem guiada por código QR
Usando o Biblioteca de visão SpireCV, detecção precisa e estimativa de posição de códigos QR são alcançadas. O GX40 pode realizar pouso guiado com precisão em códigos QR de diferentes altitudes. O centro da câmera gimbal se alinha com o centro do código QR dentro de uma margem de erro de 30 cm.
- 5m de altitude, zoom 1x
- Altitude de 8 m, zoom de 3,6x
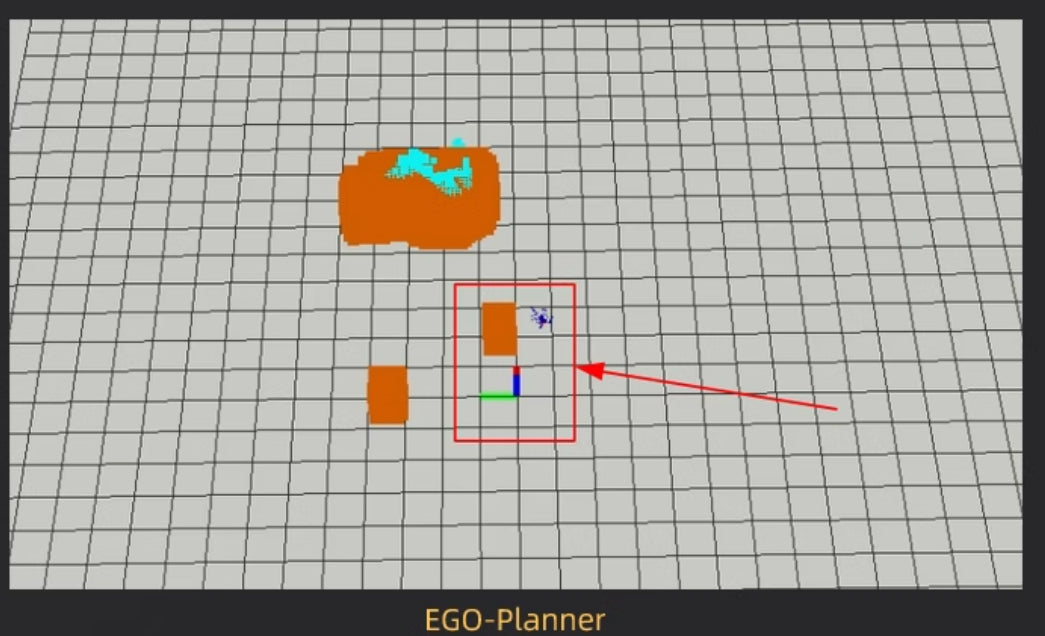
EGO-Planejador
Suporta o Algoritmo de planejamento de caminho EGO-Planner e fornece Algoritmo de mapeamento Octomap. Combinado com a estação terrestre profissional, ele permite o planejamento autônomo de caminhos dinâmicos em 3D.
Aplicações de controle de drones estáveis e confiáveis
O drone P600 é equipado com equipamento RTK de alta precisão, alcançando alta precisão pairando ao ar livre com precisão horizontal de até 1 cm e precisão vertical de até 1,5 cm. Combinado com o Módulo de controle do sistema de software Prometheus, permite um controle preciso do drone.
O módulo de controle do drone atua como uma "ponte" entre os programas de software e o drone, fornecendo vários estados de controle, como posição inicial pairando, posição atual pairando, pouso e movimento. Isso inclui seis modos de controle: posição habitual do sistema, velocidade, controle integrado de posição e velocidade e modo de controle de trajetória. No total, ele oferece sete modos de controle.

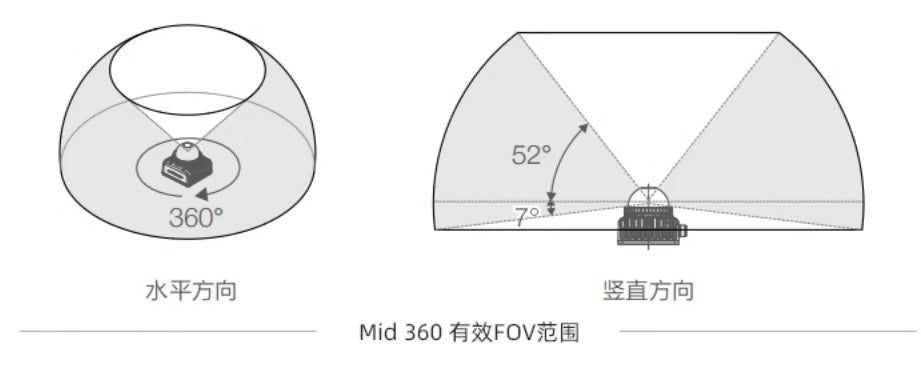
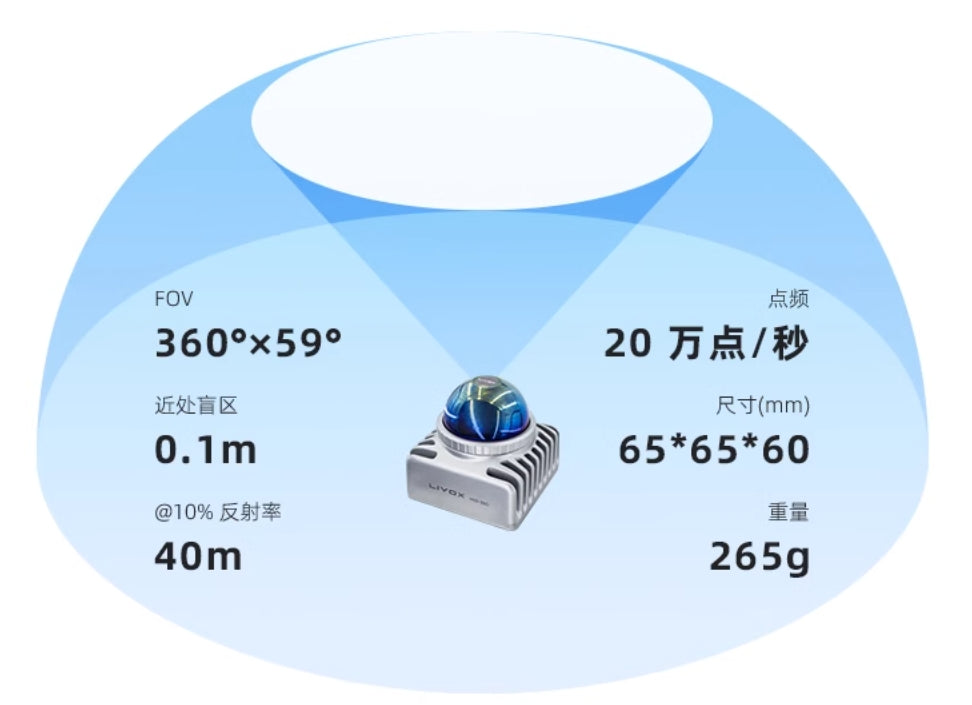
3D LiDAR Médio-360
- Baixa zona cega | Amplo campo de visão | Aplicação multicenário
O Meio 360 apresenta um Campo de visão horizontal de 360° e um campo de visão vertical máximo de 59°. Quando a refletividade do objeto alvo é de 10%, o alcance máximo de detecção pode atingir 40 metros, e o alcance da zona cega é tão pequeno quanto 10 metros. Adapta-se a vários ambientes complexos, como pouca luz e luz forte.
Equipado com o módulo Mid-360, o Drone P600 alcança uma cobertura panorâmica da zona cega, garantindo uma operação perfeita para drones em ambientes com múltiplos cenários.
- Descrições do diagrama:
- Direção horizontal: 360°
- Direção vertical: 52° FOV máximo

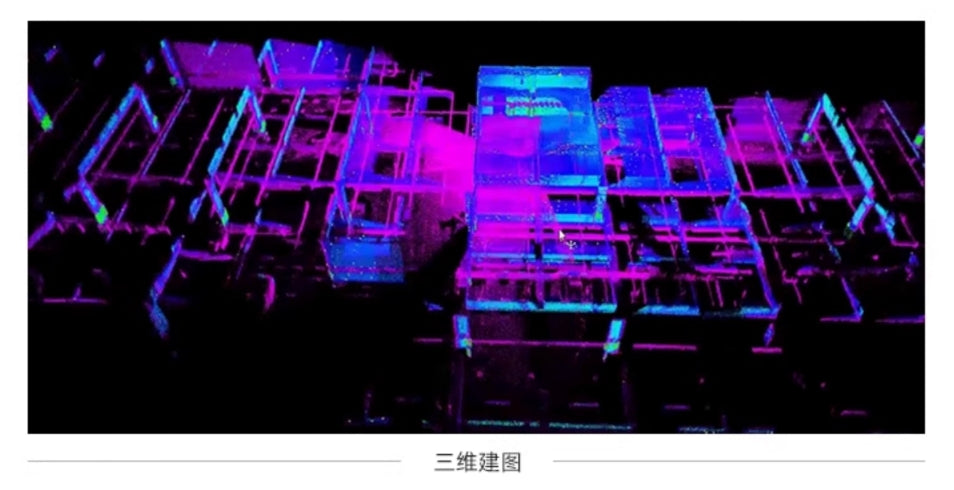
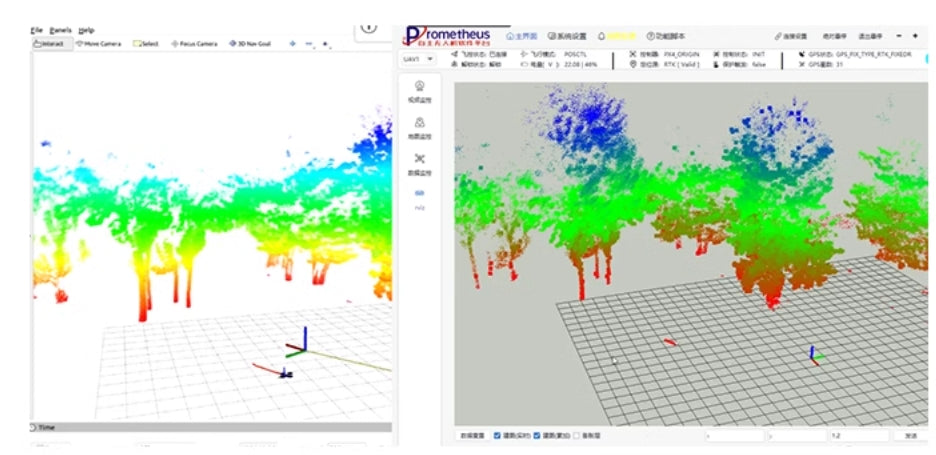
Mapeamento ambiental 3D rápido e preciso
O Drone P600 é equipado com capacidades avançadas de detecção ambiental, permitindo-lhe coletar rapidamente dados ambientais ao redor durante o voo. Esses dados são processados em tempo real para gerar um Mapa ambiental 3D, fornecendo consciência espacial precisa e suporte de navegação para diversas tarefas.
Planejamento de caminho EGO-Swarm para navegação e prevenção de obstáculos
O Meio 360 publica dados de nuvem de pontos e dados de localização, combinados com o Algoritmo de planejamento de caminho EGO-Swarm, aumentando significativamente a capacidade do drone de se adaptar autonomamente a mudanças ambientais dinâmicas. Ele pode analisar e responder em tempo real a obstáculos durante o movimento e ajustar dinamicamente o alvo de rastreamento com uma velocidade máxima de 2 m/s. Isso garante flexibilidade e adaptabilidade excepcionais em cenários operacionais desconhecidos e complexos.
Este recurso melhora muito a eficiência das tarefas do drone, permitindo que ele conclua com eficiência e precisão uma variedade de tarefas
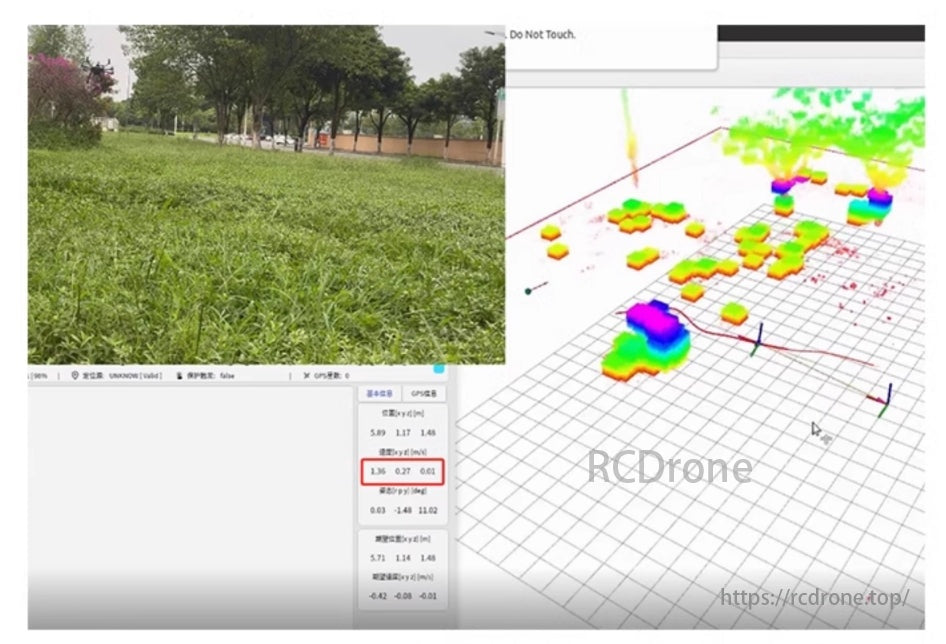
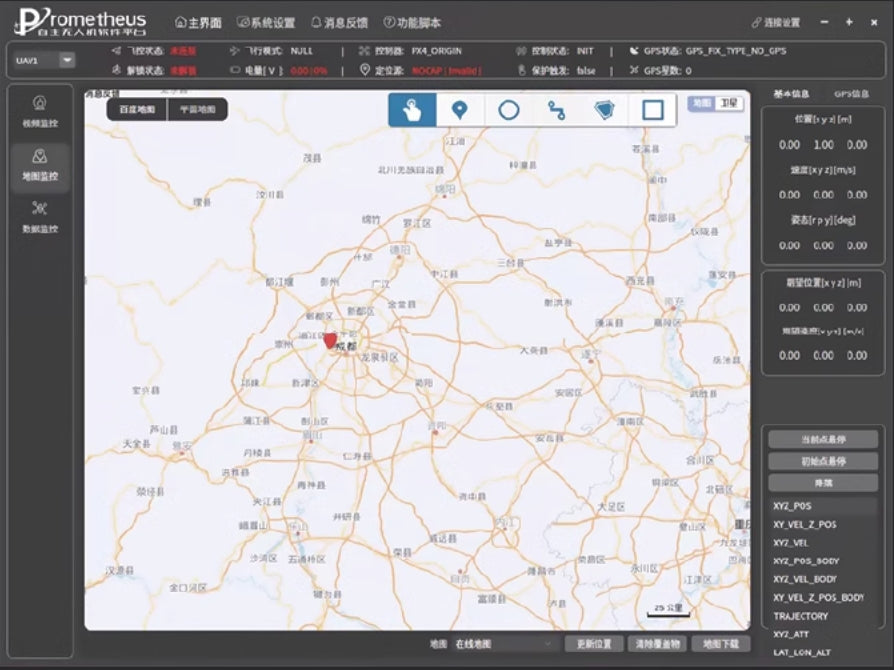
Estação terrestre profissional Prometheus Interação com drones
- Interação da estação terrestre
Isso demonstra a interface e os recursos de interação do Estação terrestre profissional Prometheus, permitindo comunicação e operação perfeitas com o drone por meio de mapeamento ambiental 3D.
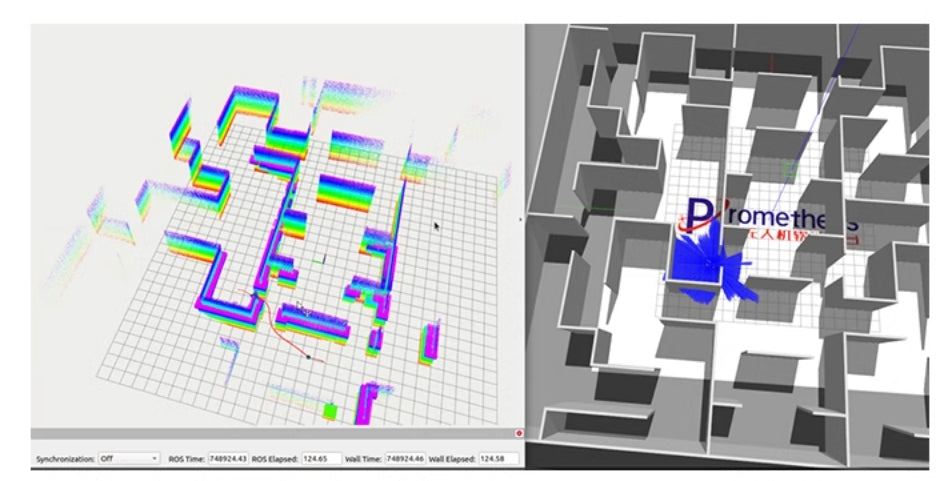
Demonstração da função de simulação integrada
- Planejamento de caminho simulado de LiDAR SLAM 3D e EGO-Swarm
Isto ilustra a simulação de 3D LiDAR SLAM e Planejamento do caminho EGO-Swarm dentro de um ambiente estruturado, mostrando os recursos do sistema em uma demonstração controlada.
Recursos de hardware
Quadro de drone
O Kedway DP1000 plataforma de drones de nível industrial utiliza um FOC (Controle Orientado a Campo) sistema de energia, permitindo que o motor gire de forma estável, com baixo ruído, alta eficiência e resposta dinâmica rápida. Todo o sistema de drone atinge um estado "pronto para voar" com excelente qualidade de hardware, garantindo desempenho de voo estável. Ele suporta resistência ultralonga (70 minutos sem carga útil), enquanto o Drone P600 requer aproximadamente 24 minutos para estabilização durante o posicionamento.

Unidade de computação poderosa
- Unidade de computação Allspark Micro Edge, equipado com o Módulo NVIDIA Orin NX, fornecendo 100 TOPS de poder de computação de ponto flutuante.
- Tamanho compacto, leve, forte compatibilidade com o sistema e Computação de alto desempenho acelerada por GPU.
- Pré-instalado com todos os ambientes de desenvolvimento, pronto para uso, melhorando a eficiência do desenvolvimento secundário.
- Dimensões: 102,5 mm × 62.5 mm × 31 mm

Controlador de transmissão de imagem integrado
Um controle remoto de drone de nível industrial combinando dados, imagem e controle em um só.
- Banda de frequência: 2,4-2,483 GHz
- Distância Máxima de Transmissão: 30 km
- Qualidade da imagem: 1080P
- Duração da bateria: 8-15 horas de operação contínua
Durante a operação do drone, os usuários podem monitorar informações do drone em tempo real, visualizar imagens da câmera e controlar o drone simultaneamente com o joystick, garantindo uma operação de voo totalmente visualizada.

RTK de alta precisão com antena dupla
O drone está equipado com um Módulo de posicionamento RTK-GNSS, que utiliza tecnologia de posicionamento diferencial de fase de portadora rápida e algoritmos de supressão de multicaminho para fornecer precisão de posicionamento em nível de centímetro para drones. Ele pode receber simultaneamente dados RTCM de várias estações de referência terrestres, suportando cálculos RTK de linha de base curta, média e longa.
Com um multi-idioma integrado Interface gráfica da Web, ele permite configuração de limite zero e exibição de dados visualizados e processos de atualização. O receptor também apresenta uma interface de configuração de página da web amigável, reduzindo significativamente a barreira operacional. Ele oferece interfaces ricas e é adaptável a vários cenários de aplicação, proporcionando desempenho excepcional em posicionamento preciso.

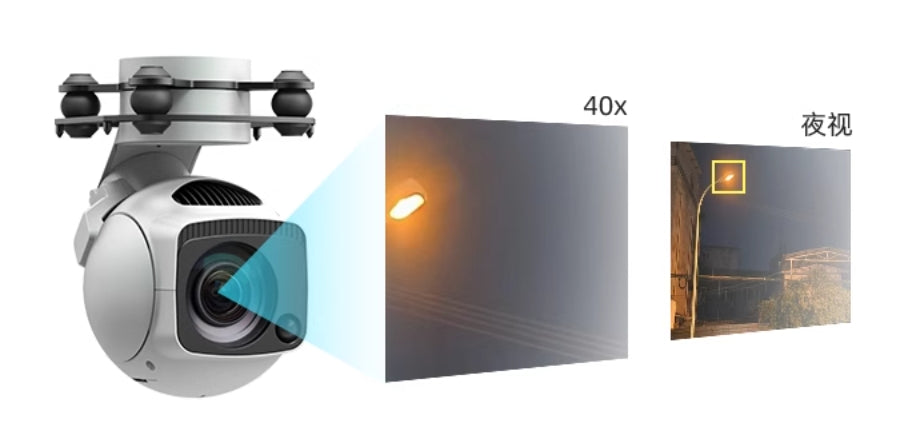
40x Gimbal Óptico-Eletrônico
Equipado com um gimbal não ortogonal de 3 eixos de alta precisão, ele possui uma câmera com zoom óptico de 10x de 8,29 megapixels combinada com tecnologia de zoom digital, alcançando uma ampliação de até 40x. Ele pode produzir 4K@30FPS video transmite pela rede. Além disso, é equipado com um módulo de iluminação a laser, permitindo imagens claras mesmo em ambientes completamente escuros.
MID 360 3D LiDAR
O Mid-360 é um sensor de detecção e alcance a laser econômico, seguro e confiável. É amplamente utilizado em áreas como robôs de logística, robôs industriais e cidades inteligentes, suportando funções como mapeamento, posicionamento, identificação e prevenção de obstáculos. O Mid-360 pode detectar objetos a até 0,1 metros e a até 100 metros. Ele apresenta tamanho compacto, amplo campo de visão, alta resolução, alta confiabilidade e uma IMU integrada.
Especificações:
- Campo de visão: 360° × 59°
- Distância mínima de detecção: 0,1 m
- Alcance (@10% de refletividade): 40 m
- Frequência de ponto: 200.000 pontos/segundo
- Dimensões (mm): 65 × 65 × 60
- Peso: 265 g
Recursos do software
Sistema de software Prometheus V2
A plataforma de desenvolvimento é baseada no ROS e na estrutura de código aberto Prometheus, oferecendo funcionalidades ricas e um grande número de interfaces de desenvolvimento secundárias para personalização eficiente. Ela fornece interfaces para dados de estado e sensor do UAV, incluindo informações de localização, modos de voo, status da bateria e IMU. Além disso, ela oferece interfaces de controle para posição, velocidade, aceleração e atitude, bem como programas de exemplo para uso da interface de desenvolvimento. O UAV também inclui funções de inspeção de segurança de voo integradas (não prevenção de obstáculos), permitindo pouso automático em situações anormais para reduzir riscos de colisão, tornando o desenvolvimento mais seguro.

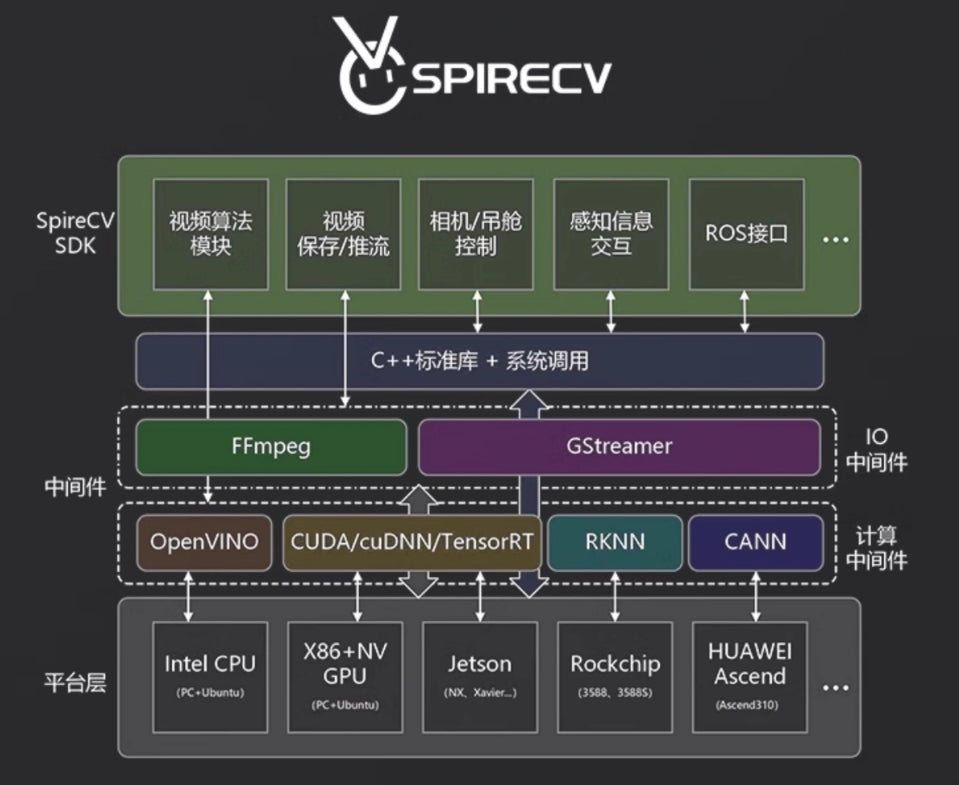
Biblioteca de Visão SpireCV
Baseado na biblioteca de visão SpireCV, este é um SDK de processamento de imagem em tempo real integrado projetado especificamente para sistemas inteligentes não tripulados. Seus principais recursos incluem controle de gimbal/câmera, armazenamento de vídeo, streaming, detecção de alvo, reconhecimento e rastreamento. Ele visa fornecer aos desenvolvedores de sistemas inteligentes não tripulados recursos de processamento de visão de alto desempenho, altamente confiáveis, simples e ricos em recursos. Este modelo oferece suporte ao treinamento YOLO para funcionalidade de rastreamento de veículos de apontar e clicar.
Sistema de estação terrestre Prometheus
A estação terrestre Prometheus é uma interface homem-máquina desenvolvida usando Qt, com base no sistema Prometheus. Ela usa comunicação TCP/UDP para simplificar a configuração da comunicação multimáquina. A estação terrestre permite que os usuários repliquem rapidamente várias funções do sistema Prometheus, fornecendo monitoramento em tempo real do status do UAV, bem como recursos como decolagem com um clique, pouso e operações de comando de controle de posição.
Aplicações
-
Pesquisa científica e desenvolvimento de IA
- Teste de algoritmo de IA
- Análise avançada de dados de sensores
- Processamento e rastreamento de imagens em tempo real
-
Aplicações Industriais
- Mapeamento de precisão e navegação em ambientes complexos
- Detecção e prevenção de obstáculos em logística e armazenagem
- Inspeção de infraestrutura, como linhas de energia e oleodutos
-
Usos acadêmicos e educacionais
- Programação secundária para pesquisa de IA baseada em ROS
- Demonstrações e experimentos de laboratório
- Treinamento em navegação autônoma por drones
-
Soluções para Cidades Inteligentes
- Reconstrução espacial 3D para planejamento urbano
- Monitoramento e gerenciamento de tráfego
- Vigilância e análise ambiental
-
Desenvolvimento personalizado
- Prototipagem para aplicações industriais especializadas
- Teste e integração de novos componentes de hardware e software
-
Resposta a desastres e monitoramento ambiental
- Inspeção e monitoramento aéreo em áreas atingidas por desastres
- Coleta de dados ambientais para pesquisa e formulação de políticas
O P600 oferece flexibilidade e funcionalidade incomparáveis, permitindo que pesquisadores, engenheiros e desenvolvedores executem projetos complexos em diversos cenários.
Related Collections







