CUAV 7-Nano Autopilot Flight Controller
CUAV 7-Nano Autopilot Flight Controller
CUAV
Couldn't load pickup availability
CUAV 7 Nano Features
1 --Ultra-small (small cube size)
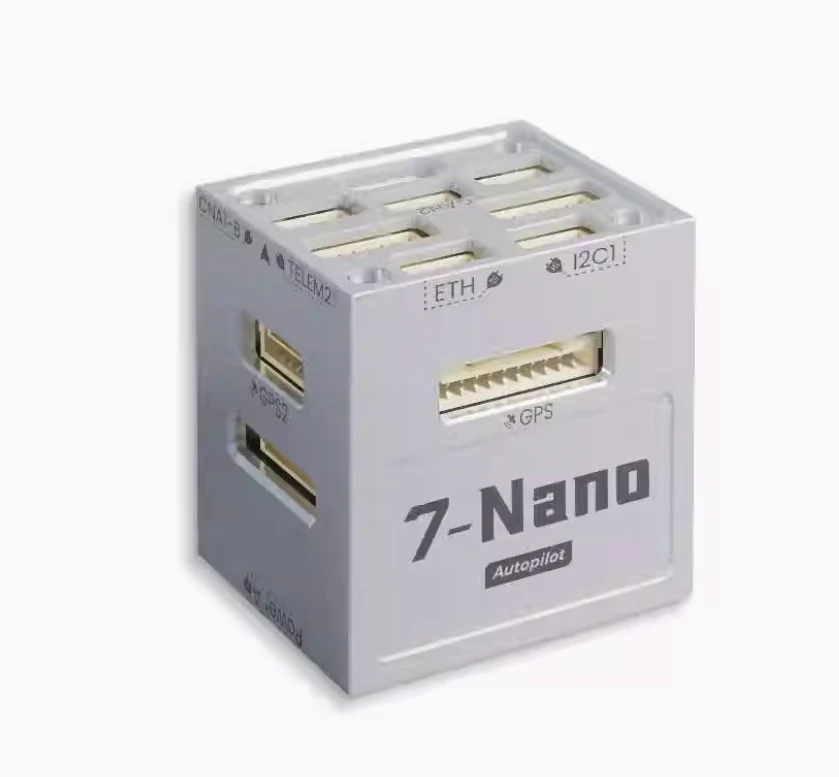
2 --Rich interface design and side outlet for easy installation
3 --STM32H753 processor, dual industrial-grade IMU redundant design
4 --Support communication with the onboard computer
5 --100M Ethernet interfaceto empower Al
6 --Support ArduPilot and PX4 firmware
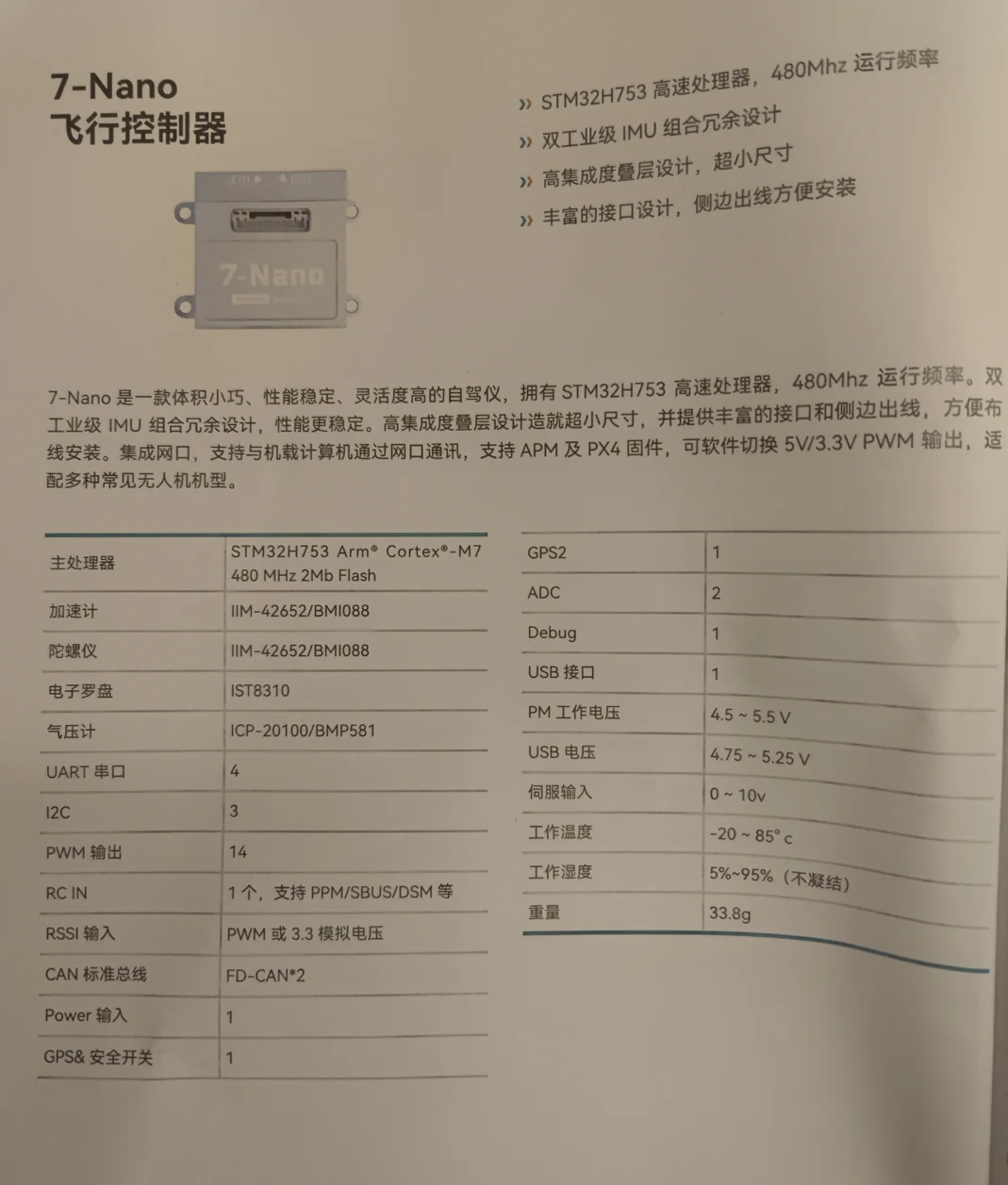
CUAV 7-Nano Autopilot Specifications
| Component | Details |
|---|---|
| Processor | STM32H753 Arm® Cortex®-M7 |
| Flash Memory | 480 MHz, 2MB Flash |
| Accelerometer | IIM-42652/BMI088 |
| Gyroscope | IIM-42652/BMI088 |
| Magnetometer | IST8310 |
| Barometer | ICP-20100/BMP581 |
| UART Ports | 4 |
| I2C Ports | 3 |
| PWM Outputs | 11 (supports PPM/SBUS/DSM etc.) |
| RC Input | 1 |
| RSSI Input | PWM 3.3V analog voltage |
| CAN Ports | FD-CAN*2 |
| Power Input | PM interface, 4.5 – 5.5V |
| USB Interface | 1 (PM USB voltage: 4.75 – 5.25V) |
| Analog Inputs | 1 (0 – 10V) |
| GPS & Safety Switch | 1 |
| GPS2 | 1 |
| ADC Ports | 2 |
| Debug Interface | 1 |
| Operating Temperature | -20 to 85°C |
| Operating Humidity | 5% – 95% (non-condensing) |
| Weight | 33.8g |
Note: The price is not the real price. If you want to buy, please send us a message/email.
CUAV 7 Nano Autopilot Features
- High-Speed Processor: Equipped with STM32H753 high-speed processor, operating at 480MHz.
- Dual Industrial-Grade IMU: Integrates dual industrial-grade IMU for enhanced redundancy.
- Compact Design: High integration density in a compact and ultra-small size.
- Rich Interface Design: Abundant interfaces for easy side installation.
The CUAV 7-Nano is a compact, high-performance autopilot, featuring the STM32H753 high-speed processor with a 480MHz operating frequency. It integrates dual industrial-grade IMUs for redundancy and high integration density in a compact and ultra-small size. The autopilot boasts abundant interface options for convenient side installation, making it suitable for various applications, including APM and PX4 flight controllers. It supports a wide range of input and output options, ensuring flexibility and reliability in diverse environments.
CUAV FPV Drone Small Size Cube 7 Nano Flight Controller Autopilot
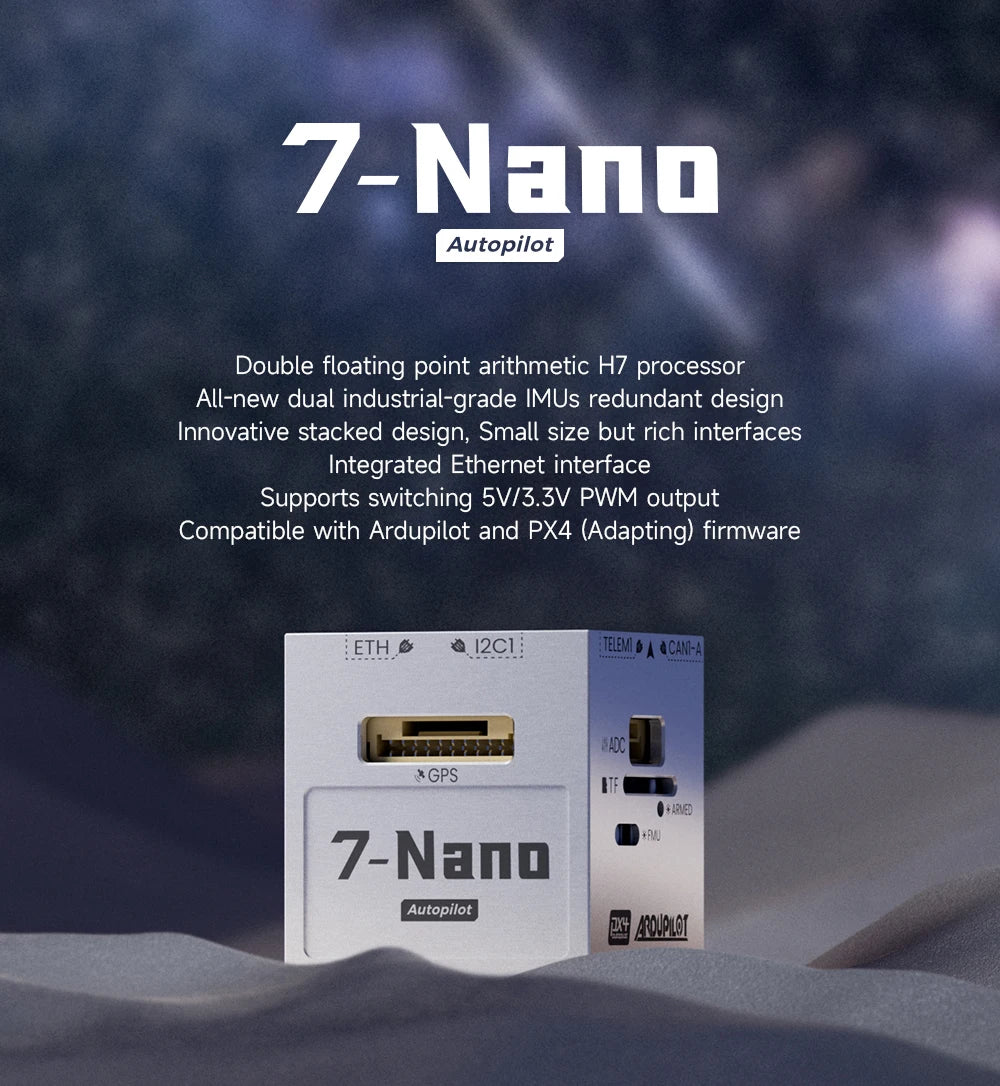
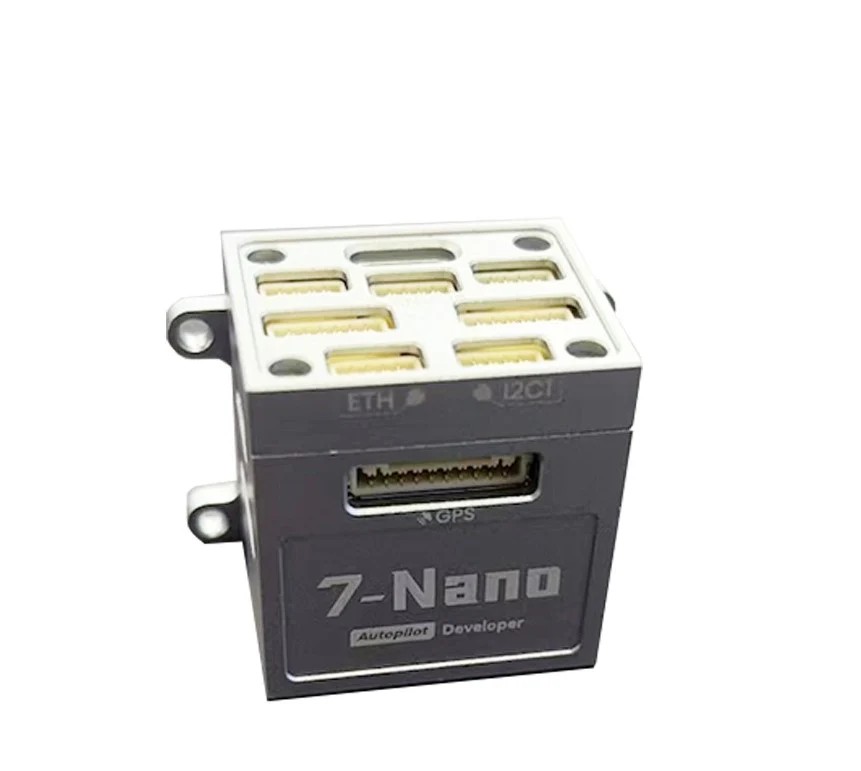
7-Nano Autopilot Flight Controller: Double precision floating point arithmetic, HZ processor. All-new dual industrial-grade IMUs with redundant design and innovative stacked design. Small in size but rich in interfaces. Integrated Ethernet interface supports switching. PWM output compatible with Ardupilot and PX4 firmware (adapting). Includes ETH I2C1 'TELEM ICAM-A' and Mx #GPS, plus 7-Nano Autopilot MUI.

The CUAV 7-Nano Autopilot Flight Controller features a highly integrated stacked design, similar to a coin-sized device that weighs only 33.8 grams. This compact structure allows for easy installation into small aircraft, such as FPV models or micro co-propeller helicopters. The controller offers rich functional interfaces, including side outlets and standard ports. These interfaces provide for most expansion needs. The processor is the H753, which supports a range of sensors and modules. These include a barometer (ICP-20100), an accelerometer (BMI088), and a GPS module (IM42652). Overall, the CUAV 7-Nano Autopilot Flight Controller is designed to be compact, yet powerful, making it suitable for a variety of applications.

The STM32H753 high-speed processor features a built-in STM32H753 high-speed processor, which supports secure boot and secure firmware upgrade services. The 480MHz double-precision floating-point operation unit occupies 2M Flash memory space, making it compatible with PX4 and ArduPilot drivers and functions (such as IMU temperature learning, non-GPS navigation, FFT algorithms, and LUA scripts). It provides ample operating frequency points at 480 MHz.
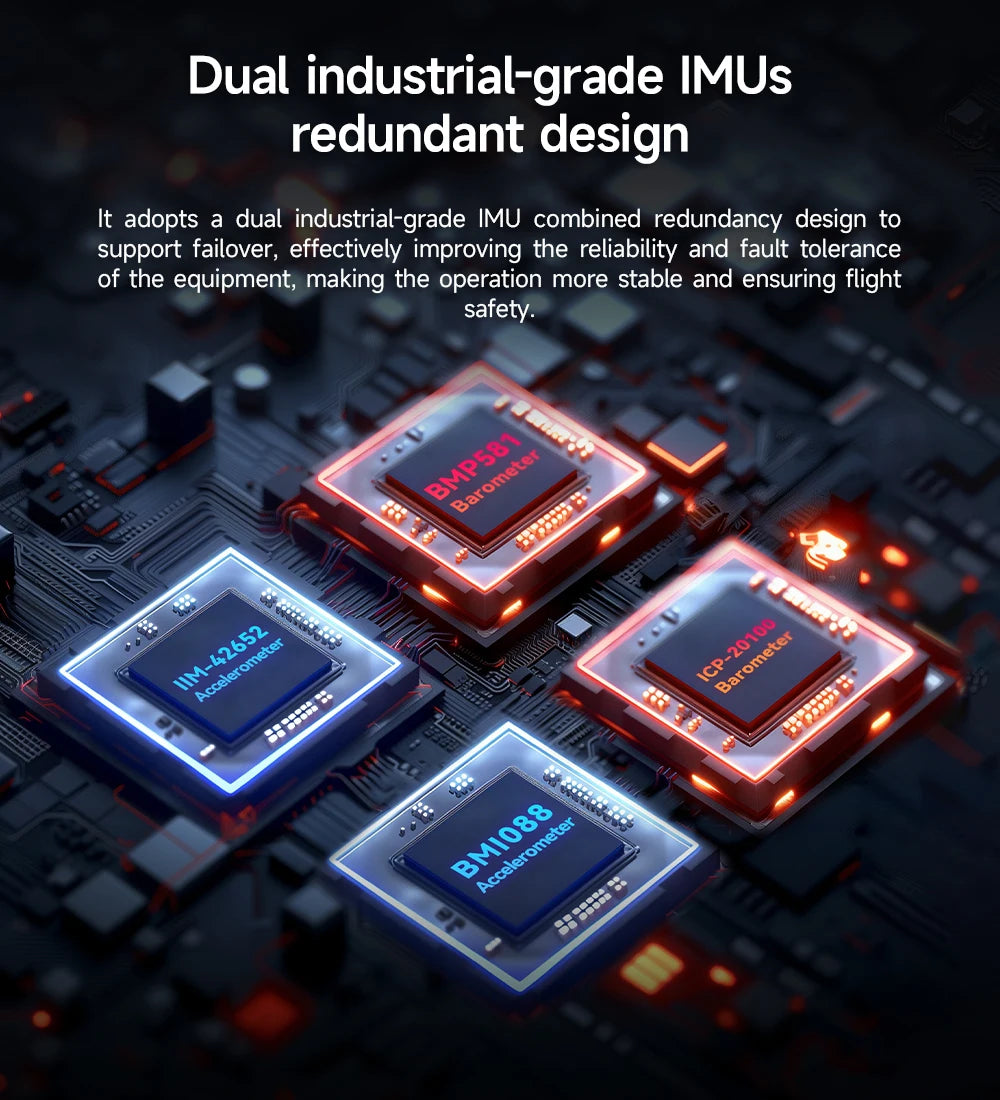
The CUAV 7-Nano Autopilot Flight Controller features a dual industrial-grade IMU combined redundancy design, ensuring failover and improving reliability and fault tolerance. This results in more stable operation and enhanced flight safety.
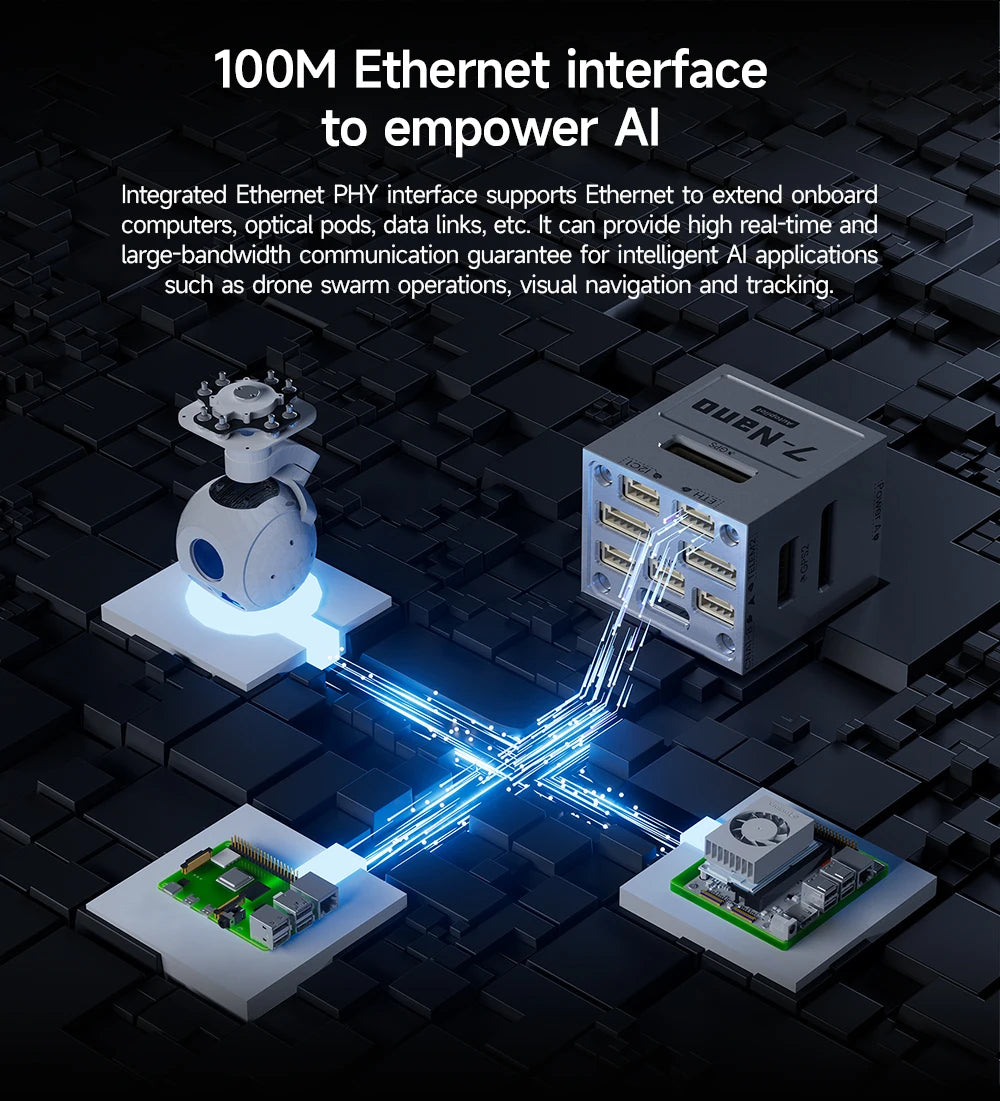
7-Nano Autopilot Flight Controller features a 1G Ethernet interface to empower AI. Integrated Ethernet PHY interface supports Ethernet connectivity for onboard computers, optical pods, data links, and more. This guarantees high real-time and bandwidth communication for intelligent AI applications like drone swarm operations, visual navigation, and tracking.
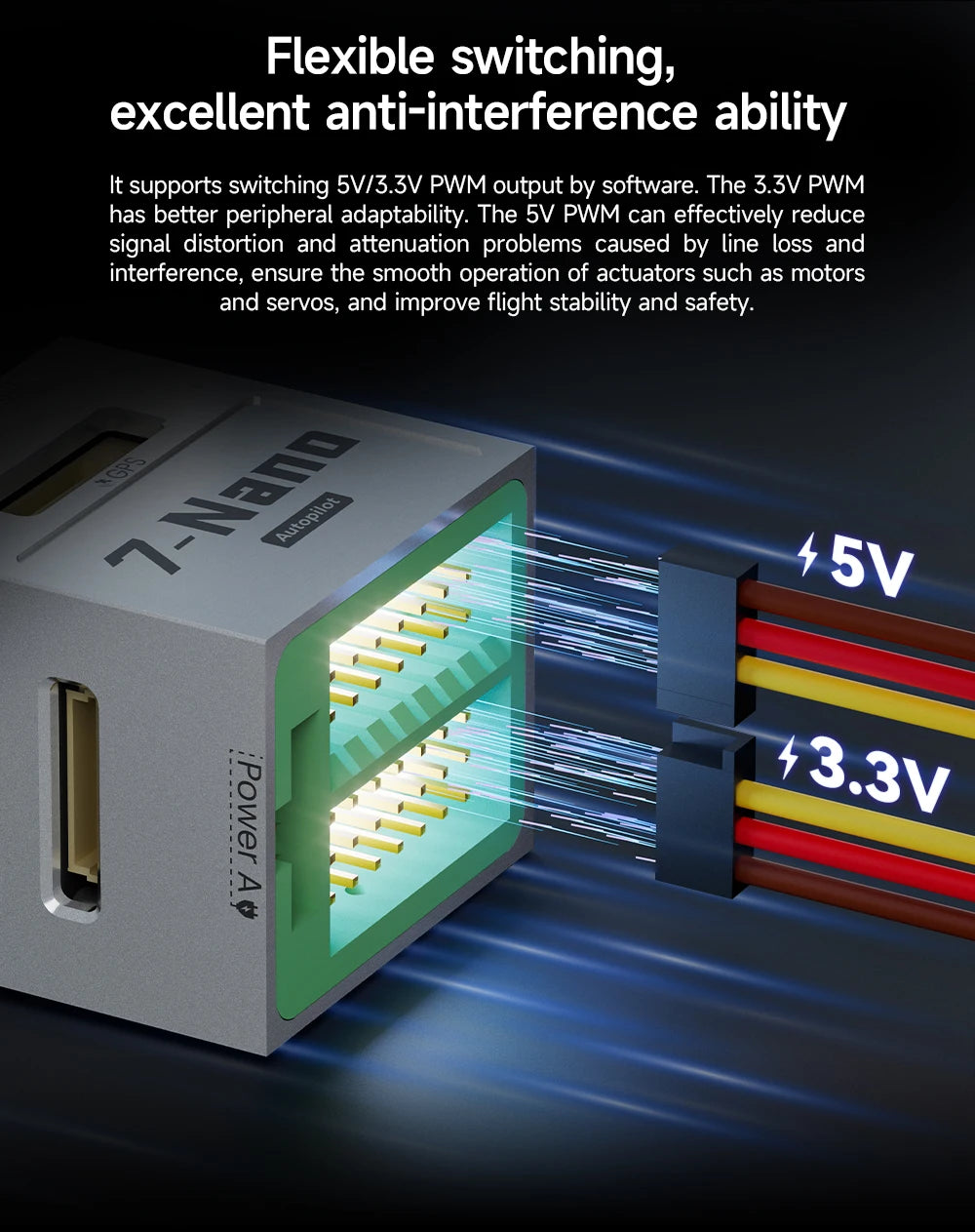
The CUAV 7-Nano Autopilot Flight Controller features flexible switching with excellent anti-interference ability. It supports software-switchable PWM output between 5V and 3.3V, enabling better peripheral adaptability. The 5V PWM effectively reduces signal distortion and attenuation problems caused by line loss and interference, ensuring the smooth operation of actuators like motors and servos, and improving flight stability and safety.
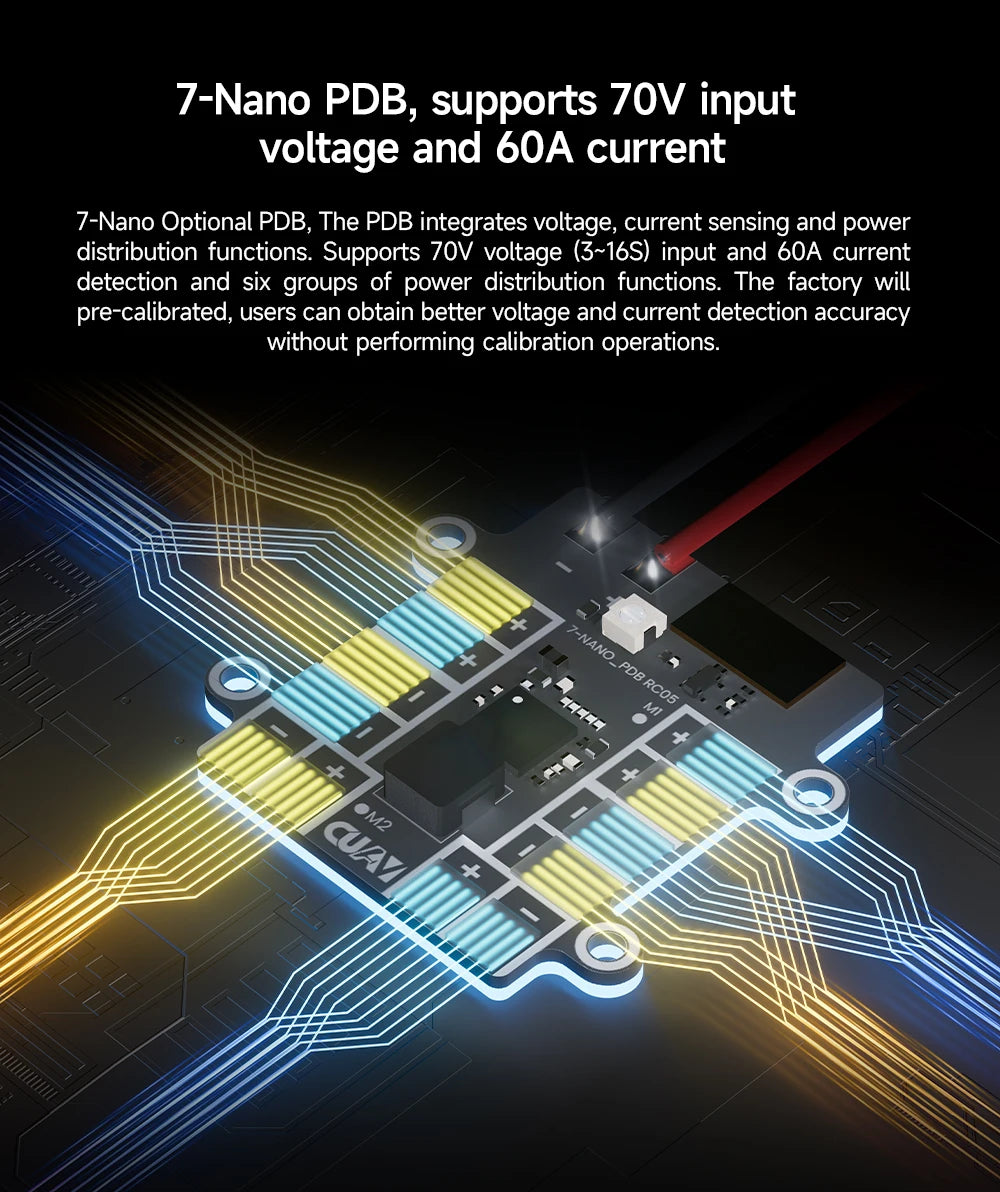
The 7-Nano Autopilot Flight Controller power distribution board (PDB) supports up to 70V input voltage and 60A current. The optional PDB integrates voltage and current sensing, as well as power distribution functions. It supports a wide range of input voltages from 3-16S cells and can detect currents up to 60A. The PDB is pre-calibrated at the factory, allowing users to achieve high accuracy in voltage and current detection without needing calibration operations.

The CUAV 7-Nano Autopilot Flight Controller supports various UAV systems, including multi-rotors, fixed-wing aircraft with vertical takeoff and landing capabilities, unmanned vehicles, and underwater vessels. It is compatible with ArduPilot and PX4 firmware, allowing for adaptation to different platforms.
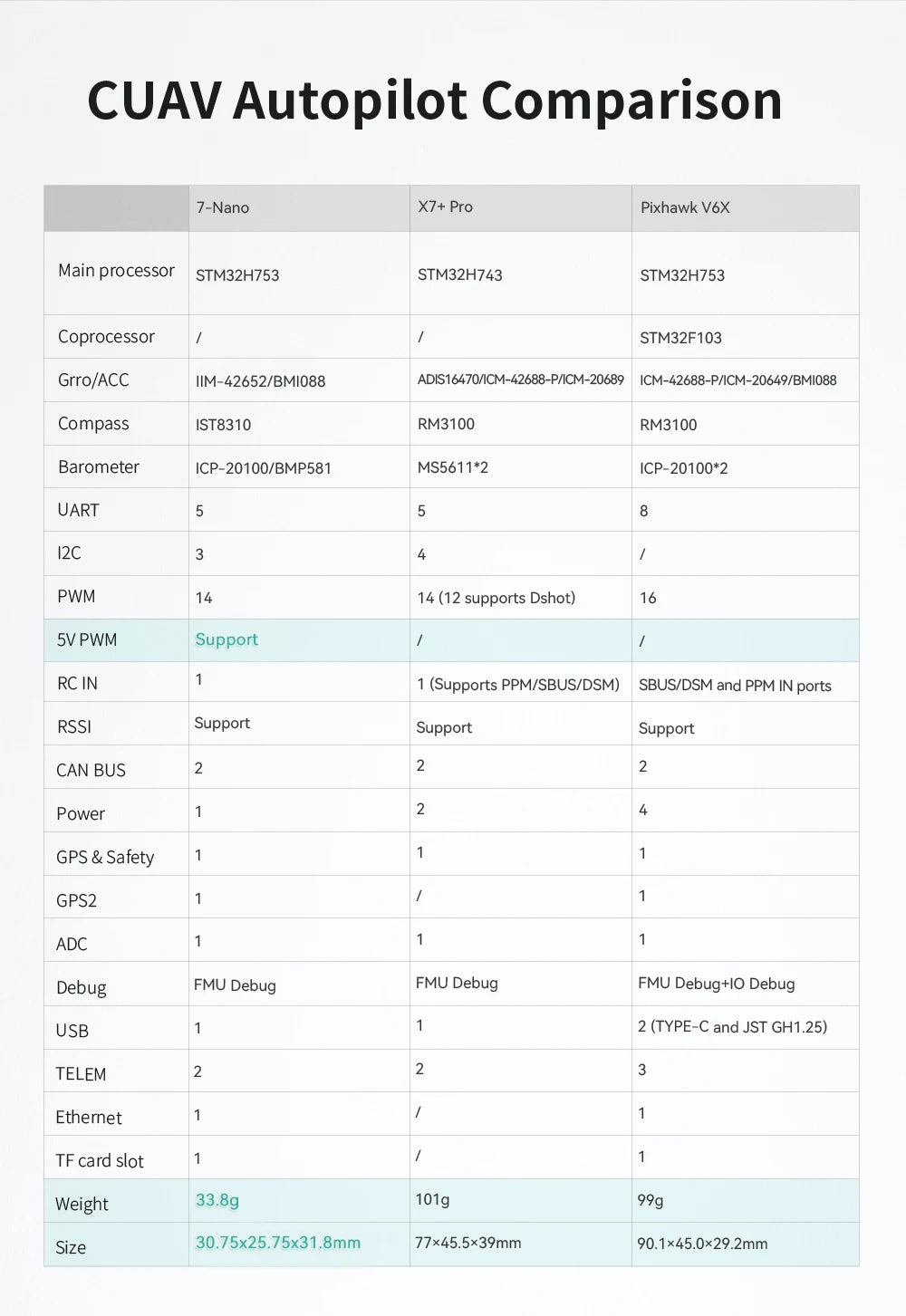
CUAV 7-Nano Autopilot Flight Controller features a powerful main processor (STM32H753) with coprocessor (STM32F103). It boasts multiple sensors, including accelerometers (IIM-42652/BMI088), gyroscopes (ADIS1647OCM), and a compass (IST8310/RM3100). The unit also includes barometers (ICP-20100/BMP581) and temperature sensors. For communication, it supports UART, I2C, PWM, and CAN Bus protocols. Additionally, the 7-Nano features an RC input with support for PPM, SBUS, and IDSM protocols. It also has a telemetry system, power management, and safety mechanisms.
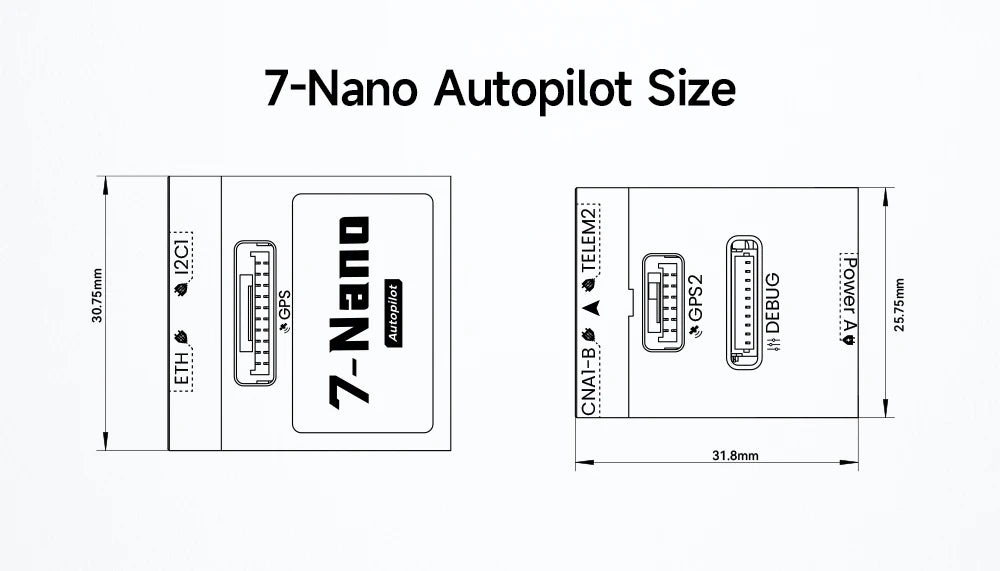
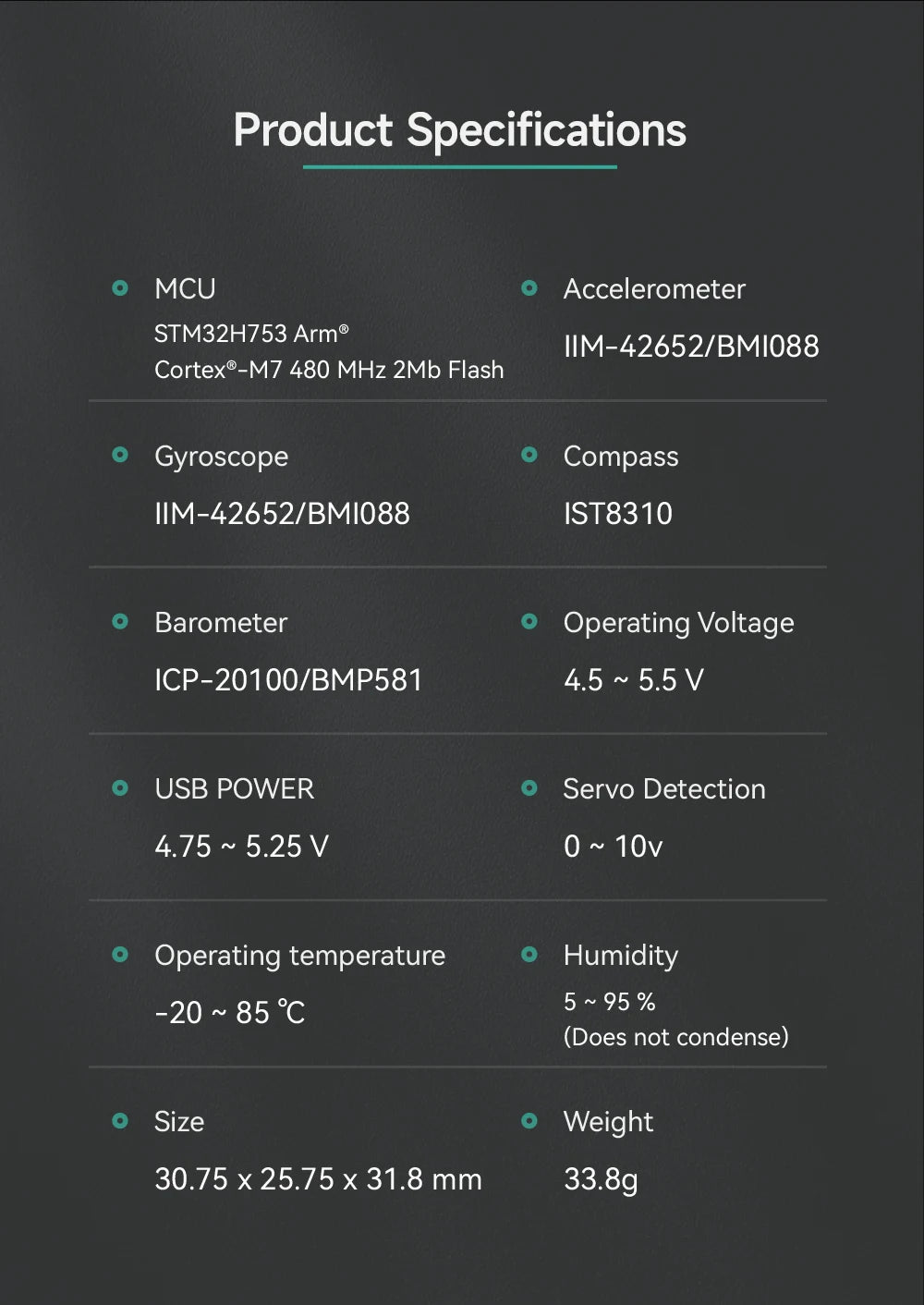
The CUAV 7-Nano Autopilot Flight Controller features a powerful STM32H753 MCU with an Arm Cortex-M7 processor running at 480 MHz and 2MB of flash memory. It also includes an accelerometer, gyroscope, compass, barometer, and servo detection capabilities. The device operates within a wide range of voltages from 4.5V to 5.5V and has a USB power interface for easy charging. Additionally, it supports operating temperatures from -20°C to 85°C and humidity levels up to 95%. The CUAV 7-Nano measures 30.75 x 25.75 x 31.8 mm in size and weighs just 33.8g.
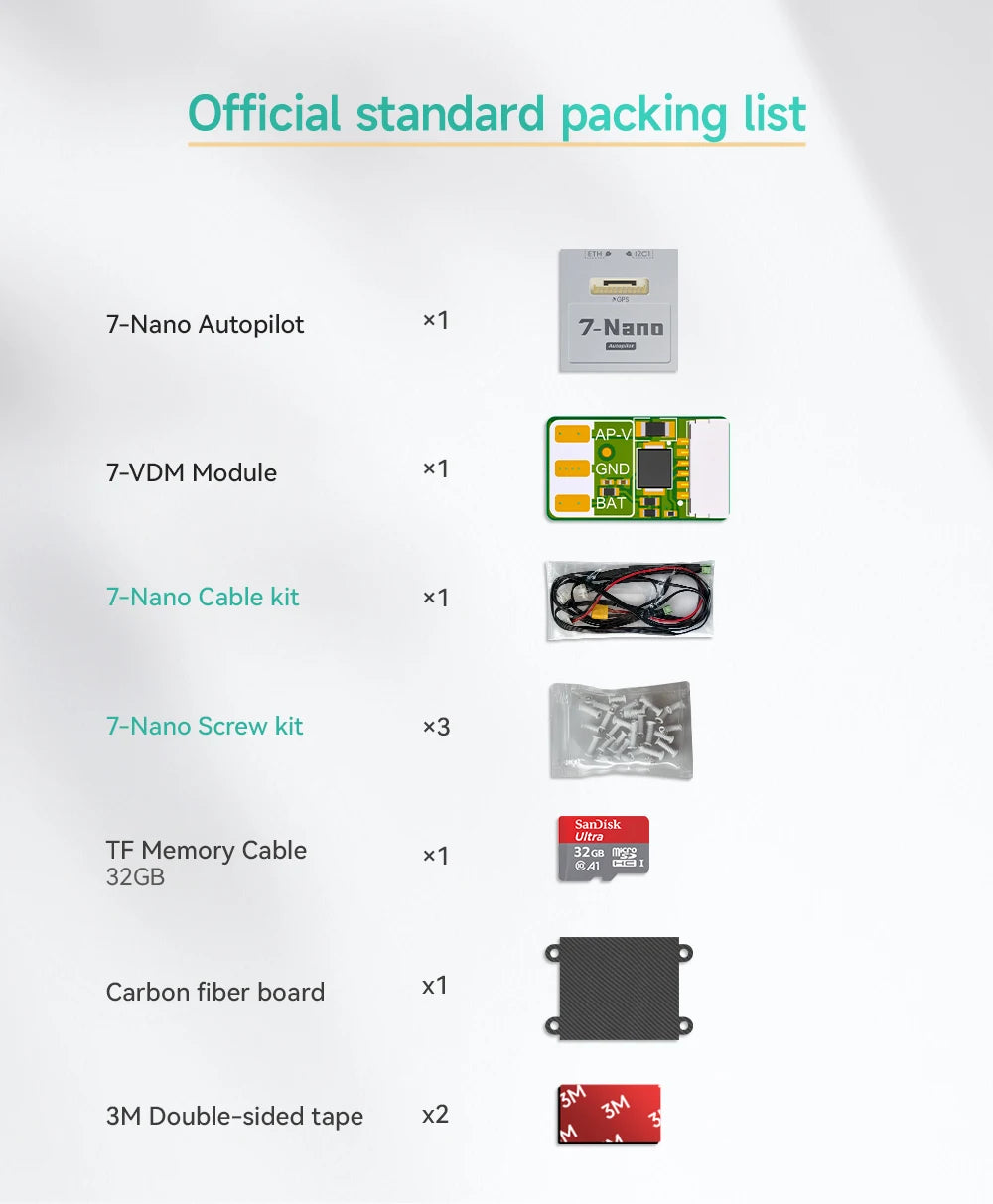
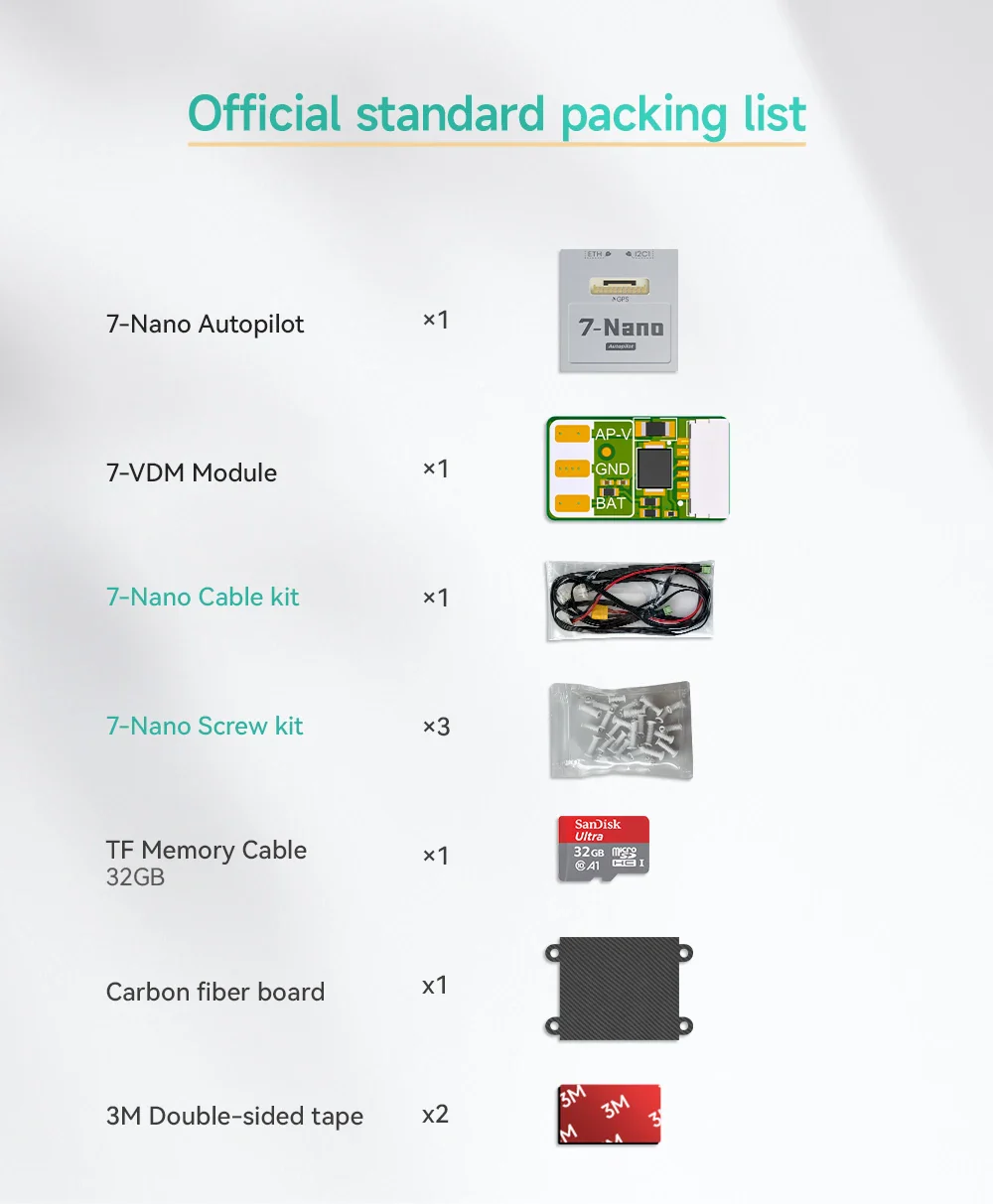
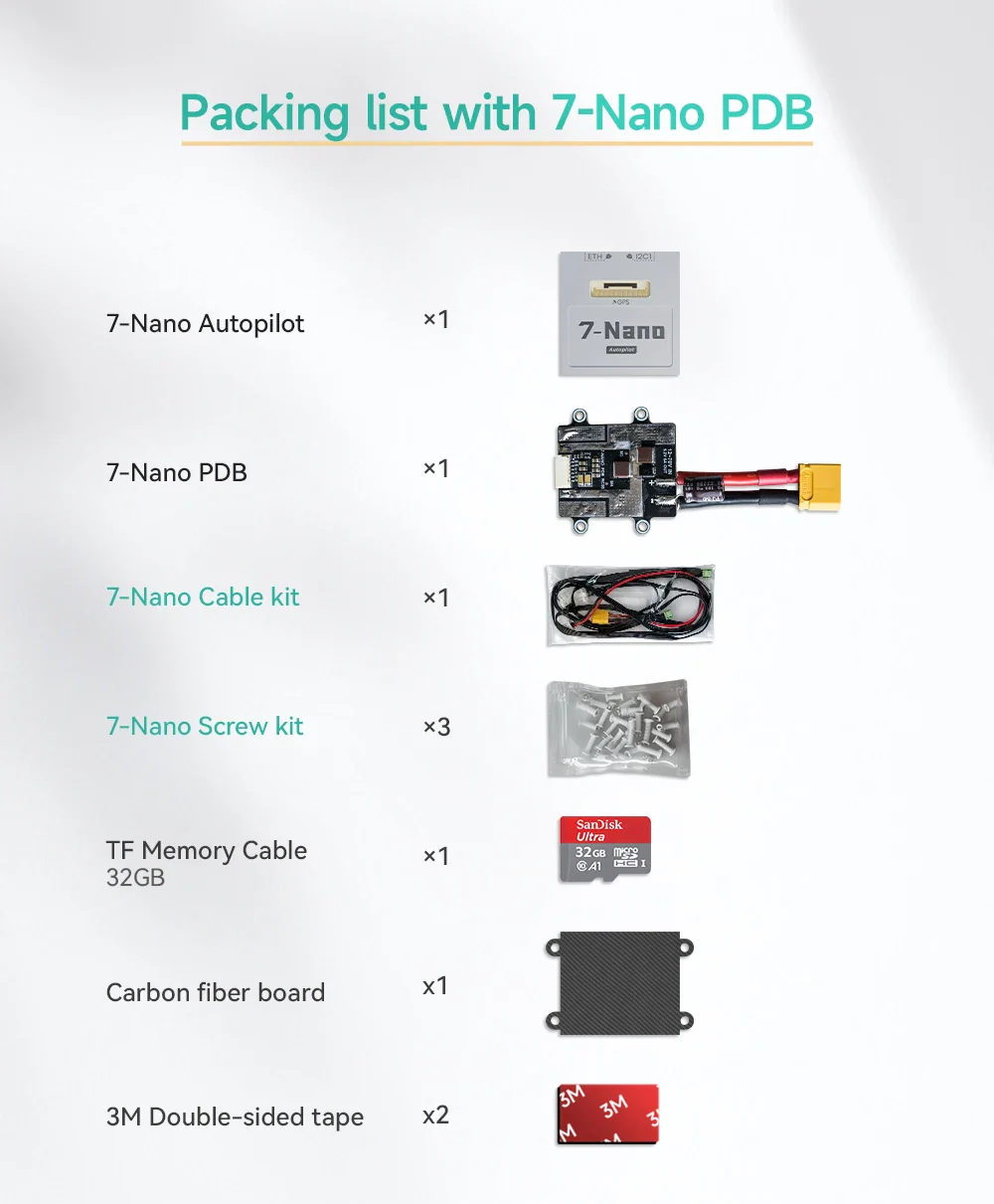
CUAV 7-Nano Autopilot Flight Controller Product Includes: Official Standard Packing List, Vel 7-Nano Autopilot, 7-VDM Module, GND BAT, 7-Nano Cable Kit, 7-Nano Screw Kit x3, Sanisk Ultra TF Memory Cable X 32G8 MEB W 0A, 32GB Carbon Fiber Board x1, 3M Double-Sided Tape x2
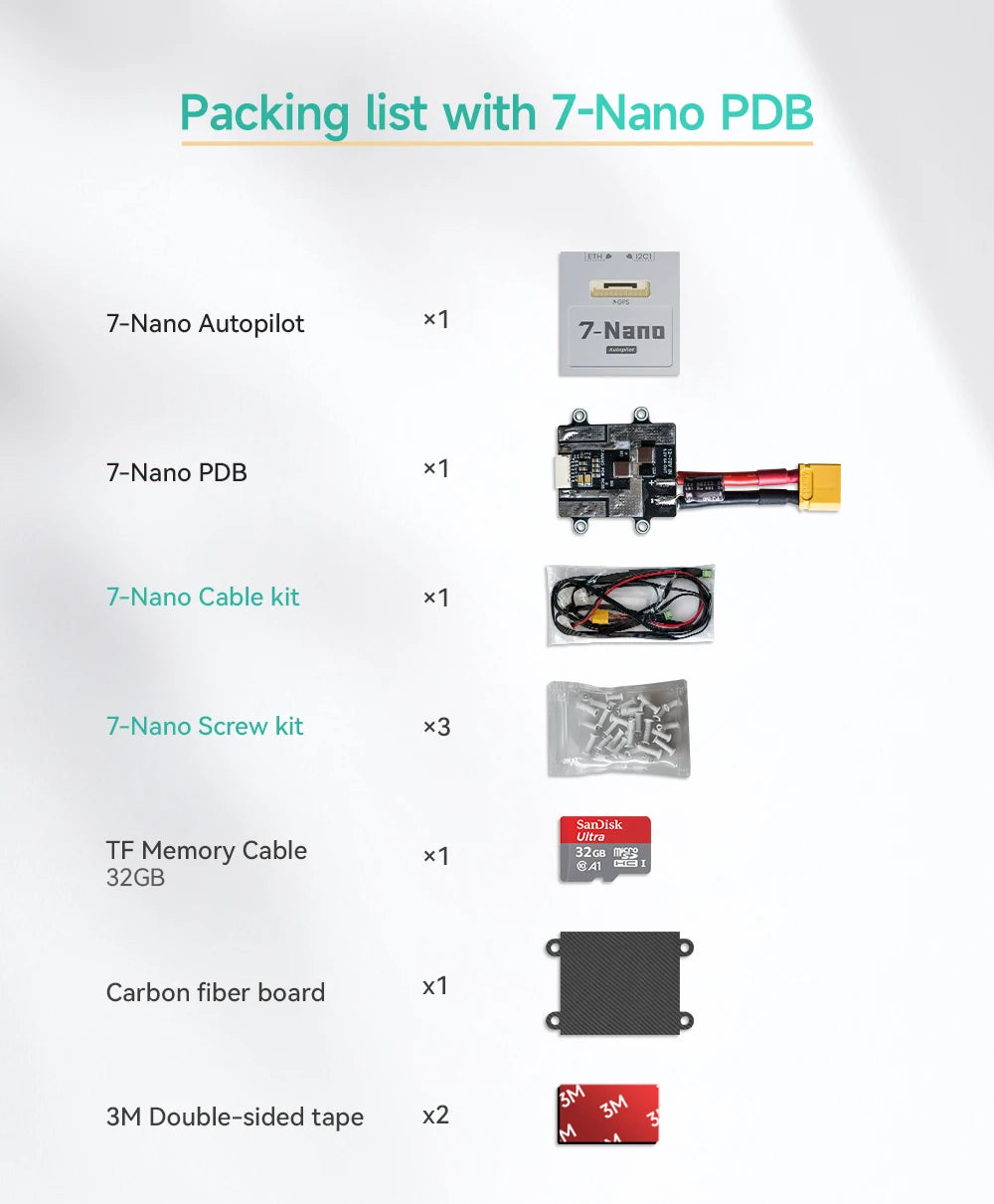
CUAV 7-Nano Autopilot Flight Controller Product Packaging List: 7-Nano PDB, GTH, IzC1, and three 7-Nano Screw kits. Additionally, included are a SanDisk Ultra TF Memory Card, a Carbon fiber board, and two rolls of Double-sided tape (3m).
CUAV-7-Nano Flight Controller
The CUAV-7-Nano flight controller produced by CUAV.
Features
-
STM32H753 microcontroller
-
2 IMUs: IIM42652 and BMI088
-
builtin IST8310 magnetometer
-
2 barometers: BMP581 and ICP20100
-
microSD card slot
-
USB-TypeC port
-
1 ETH network interface
-
5 UARTs plus USB
-
14 PWM outputs
-
3 I2C ports
-
3 CAN ports (two of which share a CAN bus and one is an independent CAN bus)
-
Analog RSSI input
-
3.3V/5V configurable PWM ouput voltage
Pinout

7-Nano Autopilot Flight Controller for RC IN (USART 1) Power GND. Features include ETH GPS&SAFETY MZ M6 MS M4 M3 M2 M1 with M9 M10 MII M12 M13 and M1 RSSIIN TELEMI CANI-A CNAI-B TELEM2 ADC FMU DEBUG (USART 3) GND. Also includes JusADC 3v3 ADC FMU_VDD_3v3 FMU_USART_TX FMU_UART_RX #ARMED GPS2 (UART 8) and FMU_SWDJIO FMU FMU_SWD_CK SDA GND.
UART Mapping
-
SERIAL0 -> USB
-
SERIAL1 -> UART7 (TELEM1)
-
SERIAL2 -> UART5 (TELEM2)
-
SERIAL3 -> USART1 (GPS&SAFETY)
-
SERIAL4 -> UART8 (GPS2)
-
SERIAL5 -> USART3 (FMU DEBUG)
The TELEM1 and TELEM2 ports have RTS/CTS pins, the other UARTs do not have RTS/CTS. All have full DMA capability.
RC Input
RC input is configured on the RCIN pin, at one end of the servo rail, marked RCIN in the above diagram. All ArduPilot supported unidirectional RC protocols can be input here including PPM. For bi-directional or half-duplex protocols, such as CRSF/ELRS a full UART will have to be used. For example if SERIAL2 (UART5) is used for bi-directional RC, then:
-
SERIAL2_PROTOCOL must be set to “23”, and:
-
PPM is not supported.
-
SBUS/DSM/SRXL connects to the R6 pin.
-
FPort requires connection to Tx and SERIAL2_OPTIONS be set to “7”.
-
CRSF/ELRS also requires a Tx connection, in addition to Rx, and automatically provides telemetry. Set SERIAL2_OPTIONS to “0”.
-
SRXL2 requires a connection to Tx and automatically provides telemetry. Set SERIAL2_OPTIONS to “4”.
Any UART can be used for RC system connections in ArduPilot also, and is compatible with all protocols except PPM. See Radio Control Systems for details.
PWM Output¶
The CUAV-7-Nano flight controller supports up to 14 PWM outputs.
The 14 PWM outputs are in 6 groups:
-
PWM 1-4 in group1 (TIM5)
-
PWM 5 and 6 in group2 (TIM4)
-
PWM 7 and 8 in group3 (TIM1)
-
PWM 9, 10 and 11 in group4 (TIM8)
-
PWM 12 in group5 (TIM15)
-
PWM 13 and 14 in group6 (TIM12)
Channels within the same group need to use the same output rate. If any channel in a group uses DShot then all channels in the group need to use DShot. Outputs 1-4 support BDShot.
First first 8 PWM outputs of CUAV-7-Nano flight controller support switching between 3.3V voltage and 5V voltage output. It can be switched to 5V by setting GPIO 80 high by setting up a Relay (see Relay Switch) to control it.
Battery Monitoring
The board has a dedicated power monitor ports on 6 pin connectors(POWER A). The correct battery setting parameters are dependent on the type of power brick which is connected. Parameters for the supplied powe monitor are already set by default. However, if lost or changed:
Enable Battery monitor with these parameter settings :
-
BATT_MONITOR = 4
Then reboot.
-
BATT_VOLT_MULT 10.1
Compass
The CUAV-7-Nano has an IST8310 builtin compass, but due to interference the board is usually used with an external I2C compass as part of a GPS/Compass combination.
Analog inputs
The CUAV-7-Nano has 6 analog inputs.
-
ADC Pin9 -> Battery Voltage
-
ADC Pin8 -> Battery Current Sensor
-
ADC Pin5 -> Vdd 5V supply sense
-
ADC Pin13 -> ADC 3.3V Sense
-
ADC Pin12 -> ADC 6.6V Sense
-
ADC Pin10 -> RSSI voltage monitoring
Loading Firmware
Firmware for these boards can be found at https://firmware.ardupilot.org in sub-folders labeled “CUAV-7-Nano”.
The board comes pre-installed with an ArduPilot compatible bootloader, allowing the loading of *.apj firmware files with any ArduPilot compatible ground station.
Related Collections