Holybro Pixhawk 6X-RT - (Developer Edition) Autopilot Flight Controller Standard/Mini Set
Holybro Pixhawk 6X-RT - (Developer Edition) Autopilot Flight Controller Standard/Mini Set
HolyBro
Couldn't load pickup availability
Overview
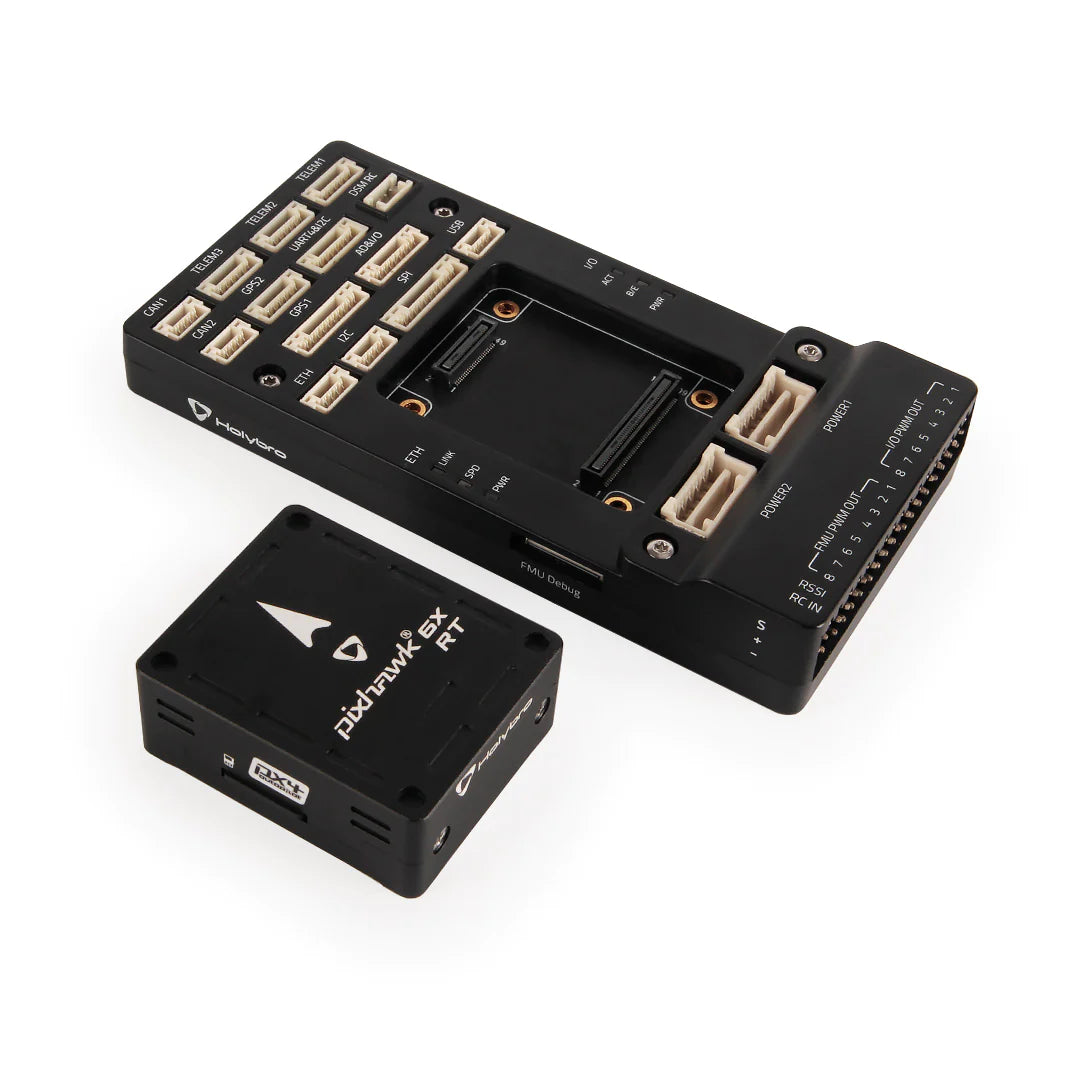
The Pixhawk 6X-RT is based on the Pixhawk® FMUv6X-RT Open Standard and the Pixhawk® Autopilot Bus Standard. It comes with PX4 Autopilot® pre-installed. Inside the Pixhawk 6X-RT flight controller, you can find an NXP-based i.MXRT1176 MCU, paired with sensor technology from Bosch® and InvenSense®, giving you flexibility and reliability for controlling any autonomous vehicle.
The i.MXRT1176 microcontroller contains an Arm® Cortex-M7 at 1 GHz and a Cortex-M4 at 400 MHz. It has 2MB SRAM and 64MB Octal SPI Flash. Thanks to the updated processing power, developers can be more productive and efficient with their development work, allowing for complex algorithms and models.
It includes high-performance, low-noise IMUs designed for better stabilization, and has triple redundant IMUs & double redundant barometers on separate buses. When the Autopilot detects a sensor failure, the system seamlessly switches to another to maintain flight control reliability. An independent LDO powers every sensor set with independent power control. A vibration isolation system to filter out high-frequency vibration and reduce noise to ensure accurate readings, allowing vehicles to reach better overall flight performances. An integrated Microchip Ethernet PHY, high-speed communication with mission computers via Ethernet is now possible.
The Pixhawk 6X-RT is perfect for developers at corporate research labs, startups, academics (research, professors, students), and commercial application. This Flight controller is compatible with any baseboard that uses the Pixhawk Autopilot bus, such as the Pixhawk Baseboard, Pixhawk Mini Baseboard, and Pixhawk RPi CM4 Baseboard.
Key Design Points
- High performance dual core i.MXRT1176 Processor with Cortex-M7 @ 1GHz – Cortex-M4 @ 400MHz
- Modular flight controller: separated IMU, FMU, and Base system connected by a 100-pin & a 50-pin Pixhawk® Autopilot Bus connector.
- Redundancy: 3x IMU sensors & 2x Barometer sensors on separate buses
- Triple redundancy domains: Completely isolated sensor domains with separate buses and separate power control
- Vibration isolation system to filter out high frequency vibration and reduce noise to ensure accurate readings
- Ethernet interface for high-speed mission computer integration
- IMUs are temperature-controlled by onboard heating resistors, allowing optimum working temperature of IMUs
- Hardware secure element NXP EdgeLock SE051 an extension to the widely trusted EdgeLock SE050 Plug & Trust secure element family, supports applet updates in the field and delivers proven security certified to CC EAL 6+, with AVA_VAN.5 up to the OS level, for strong protection against the most recent attack scenarios.. E.g to securely store operator ID
Note:
- This developer edition for early adopters while we continue to accumulate flight test hours
- This Flight Controller is currently support in PX4 Flight Stack only. (Firmware Target: FMUv6xrt). It is not supported in Ardupilot.
- This Flight controller uses digital power module (same as Pixhawk 6X, full list can be found here) Power module comparison chart
Specification
-
MCU: i.MXRT1176
-
Cortex-M7 @ 1GHz
-
Cortex-M4 @ 400MHz
-
2MB SRAM
-
64MB Octal SPI Flash
-
IO Processor: STM32F103
-
32 Bit Arm® Cortex®-M3, 72MHz, 64KB SRAM
-
On-board sensors
-
Accel/Gyro: BMI088
-
Accel/Gyro: ICM-42670-P
-
Accel/Gyro: ICM-42686-P
-
Mag: BMM150
-
Barometer: 2x BMP388
- Hardware secure element
- NXP EdgeLock SE051C2
- SDHC interface
- 12-Channel PWM
- 8x UART
- 4x I2C
- 6x SPI
- 3x CAN-FD
- RMII 100M Ethernet
- USB
- Open-Source Software enablement
- PX4 Autopilot
- NuttX RTOS
- Zephyr RTOS
SKU20257 Standard Set/ SKU258 Mini Set Includes:
-
Pixhawk 6X-RT Flight Controller Module
-
Pixhawk Standard Base/Pixhawk Mini Base
- PM02D HV Power Module
-
Cable Set
Reference link:
- Firmware Flashing Instruction (Github)
-
PX4 on the NXP IMXRT1176 1 GHz MCU - Presentation slides by NXP
- i.MX RT1176 – product page 1 GHz Crossover MCU with Arm® Cortex® Cores
- EdgeLock® SE051: Proven, Easy-to-Use IoT Security Solution with Support for Updatability and Custom Applets