Jumper Xiake800 VTOL - Fixed Wing Y3 Vertical Takeoff 800mm Wingspan FPV Aircraft Long Flight Airplanes Carrier RC Model
Jumper Xiake800 VTOL - Fixed Wing Y3 Vertical Takeoff 800mm Wingspan FPV Aircraft Long Flight Airplanes Carrier RC Model
RCDrone
Couldn't load pickup availability
Jumper Xiake800 VTOL SPECIFICATIONS
Video Capture Resolution: Other
Type: Airplane
State of Assembly: Almost Ready
Remote Distance: 5km
Remote Control: Yes
Recommend Age: 14+y
Power Source: Electric
Package Includes: Remote Controller
Origin: Mainland China
Operator Skill Level: Intermediate
Model Number: XIAKE800 800mm wingspan
Material: Foam
Indoor/Outdoor Use: Outdoor
Flight Time: 30min
Features: Auto Return
Dimensions: 51cm-99cm
Controller Mode: MODE2
Controller Battery: recommended 4s 1500-2200mah 30C
Control Channels: 12 Channels & Up
Camera Mount Type: Other
Brand Name: uuustore
Aerial Photography: No
Specifications:
Brand: Jumper
Model: XiaKe800
Model: Y3 vertical takeoff wing
Wing span: 800mm
Propeller: 6238
Motor: 2205.5
Electric regulation: 30A
Flight control: based on PIX
BEC: dual voltage output
Receiver: ELRS3.0
FPV interface: HD/analog
GPS: One click return
Steering gear: all metal teeth
Battery: recommended 4s 1500-2200mah 30C
Endurance: 30 minutes
Takeoff weight: 650-1000g
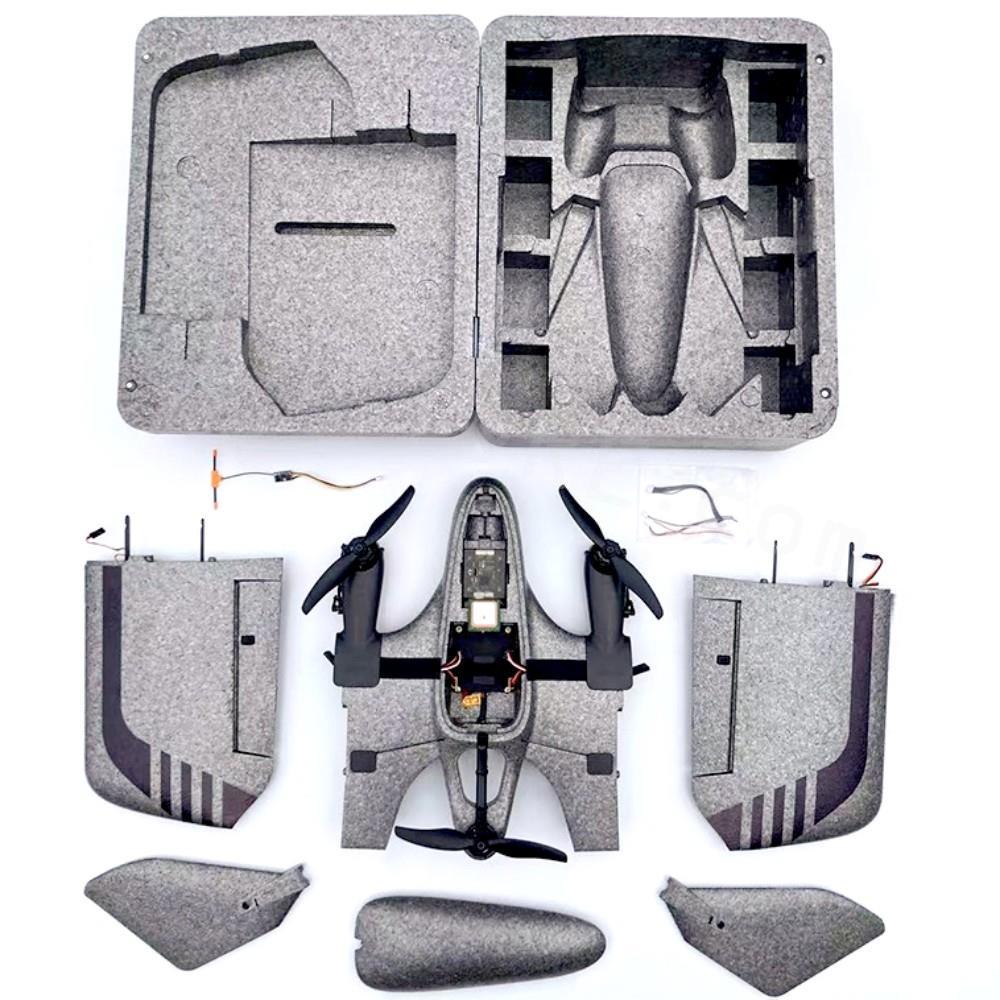
PNP package included:
(Body EPP+plastic parts, flight control, electrical Engine, electric regulator, steering gear, GPS module Block, propeller)
promotion period: add ELRS or D16 CRSF interface and packing box
PNP configuration * 1,
T-PRO-ELRS-SE remote control * 1,
Remark:we recommend Tattu 4s 2200 45c battery,but it is not include in the package
XIAKE800 UAV Flight Precautions
Factory setting of flight control
Pattern:
1. Vertical self stabilization mode: only attitude stabilization. Throttle, lifting, rolling and heading are all manually controlled
2. Self stabilized flight mode A: only attitude stabilization. Throttle, lifting and rolling are all manually controlled
3. Cruise mode: accelerator lever middle position, altitude and course keeping;
4. Return mode: fixed wing return, with an altitude of 100 meters, return to hover over the takeoff point without landing
Flight parameter prompt:
1. Minimum altitude warning: the default is 20m. If the aircraft is lower than 20m, the "altitude too low" will be broadcast
2. Battery power broadcast: it will broadcast the percentage of power of airborne power battery in real time
3. Mode switching broadcast: when switching modes, prompt the current flight mode
4. GPS locking announcement: when GPS is locked, "GPS 3D locking" will be announced"
Precautions for flight process:
1. "Vertical self stabilizing mode" takeoff: Do not push the accelerator sharply, and adjust the aircraft in a horizontal attitude in real time.
2. Conversion from "vertical self stabilizing mode" to "self stabilizing mode flight mode A": for the first flight, it is recommended that the conversion height should not be less than 30 meters, the middle position of the throttle lever, the switch, and the flight control will automatically control the conversion, and it is prohibited to hit the stick during this process. During the conversion process of the aircraft, the motor speed increases significantly (listen to the sound). After the conversion, the remote controller resumes the control of the motor speed (at this time, the sound drops significantly corresponding to the middle position of the accelerator). The tail motor stops rotating, the nose cocks up, and the aircraft turns to the level flight state. The conversion is completed (this process takes 2-3 seconds).
3. Switch from "self stabilizing mode flight mode A" to "cruise mode": adjust the altitude, switch to "cruise mode" after heading, and the aircraft will enter the altitude and heading holding state (accelerator 50%)
4. "Return mode": The aircraft altitude is automatically adjusted to 100m and returns. If it is necessary to change out, just switch to other modes.
5. Turn to "vertical self stabilizing mode" for landing: fly to the altitude above the landing point (the altitude is not too high), center the throttle, switch the switch, and the aircraft will quickly turn to "vertical self stabilizing mode".
6. Attention shall be paid during landing: If the hovering altitude is too high, the motor power will drop during fuel collection and landing, which will weaken the self stability adjustment ability of the aircraft and significantly increase the impact of wind. Suggestion: After switching from level flight to vertical flight, still use the fixed wing to fly (the push rod lowers the altitude, and the throttle can be low at this time). With the decrease of altitude and speed, gradually push up the throttle (remember, it is impossible to stall in vertical flight).
Warning: Do not lock the throttle when the aircraft is in the air (a new return point will be saved every time the aircraft is unlocked)


Vertical takeoff and landing eliminates the difficulties associated with traditional fixed-wing aircraft when taking off and landing. This design reduces the site requirements needed for lift-off, as it features a lifting mechanism that drives mode adopted to shorten the force arm of the steering gear as much as possible, thereby completely eliminating jitter and self-excited phenomena caused by direct drive steering gear.
XIAKE8OO has a PIX based tallored flight controller and BEC Make the wiring layout of the engine room simple and relilable BEC outputs SV (for flight control) and 9V (for FPV) respectively .

XIAKE8O has a safe and compact storage box Buckle type fuselage parts storage makes transportation safer . 8 independent battery storage positions, it can fly all day .
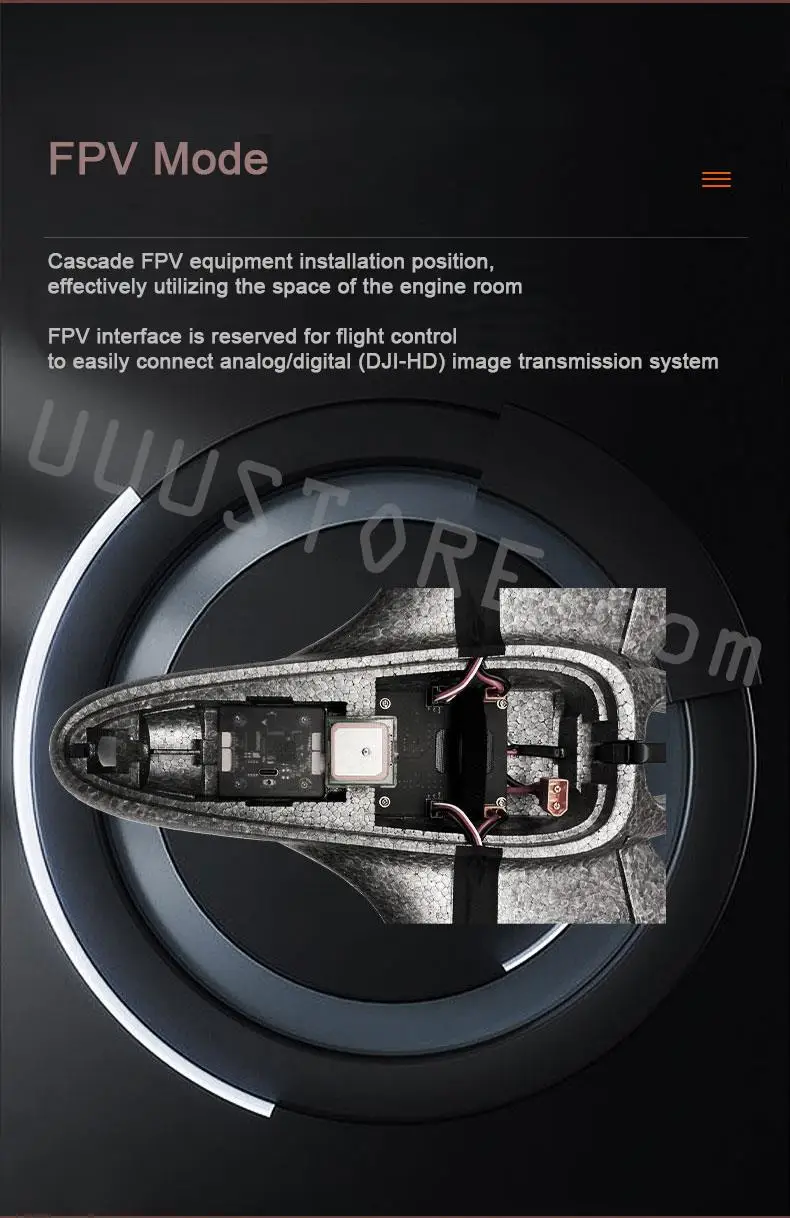
The Cascade FPV interface is designed for easy connectivity to flight controllers, allowing for seamless integration with analog and digital (such as DJI HD) image transmission systems.

XIAKE8OO's innovative quick disassembly structure makes carrying and transportation easier . wing adopts the traditional DuPont interface, which can still be used when the wing vibrates .

XIAKE800 flight control wiring diagram (PNP and RTF versions, wiring and debugging have been completed before delivery)
Related Collections