








CQ230 Assembly Drone Development Kit - Raspberry Pi 4B Pixhawk Ardupilot Industrial Open-Source Programmable DIY Drone Kit With Anti-collision Rack
CQ230 Assembly Drone Development Kit - Raspberry Pi 4B Pixhawk Ardupilot Industrial Open-Source Programmable DIY Drone Kit With Anti-collision Rack
RCDrone
Couldn't load pickup availability
Overview
The CQ230 Assembly Drone Development Kit is a compact, open-source DIY drone platform powered by the Raspberry Pi 4B and Pixhawk flight controller. Featuring a 230mm wheelbase, anti-collision frame, and a 4S (16.8V) power system, this drone is ideal for learning and experimenting with open-source programmable features. The platform is fully equipped for tasks like waypoint navigation, data monitoring, and real-time video streaming, making it an excellent choice for developers and beginners alike.
Key Features
- Compact Design: With a 360mm x 360mm x 300mm size, the drone is ideal for small spaces.
- Anti-Collision Rack: Full carbon fiber anti-collision frame ensures durability and protection.
- Raspberry Pi 4B Integration: Enhanced with Ubuntu 20.04 for smooth operation and development.
- Open-Source Framework: Powered by Ardupilot, supporting Dronekit, MAVLink, and ROS.
- Programmable Tasks: Capable of autonomous navigation, real-time data monitoring, and visual processing.
- Waypoint Navigation: Set routes with GPS-based accuracy.
- Real-Time Data Transmission: WiFi-enabled data transfer to ground stations.
- Visual Navigation: Dual-camera systems for precise indoor navigation and obstacle avoidance.
- Programmable Controls: Utilize Dronekit-Python to create custom flight commands.
- System Simulation: Combine SITL simulation for seamless testing of functionality.
Specifications
| Parameter | Details |
|---|---|
| Model | CQ230 |
| Wheelbase | 230mm |
| Battery | 4S (16.8V) |
| Flight Time | 7 minutes |
| Payload Capacity | 200g |
| Wind Resistance | Level 3-4 |
| Max Speed | 20 km/h |
| Max Flight Altitude | 120m |
| Positioning Accuracy | 2-3m (GPS) |
| Weight | 612g |
| Remote Control Range | 700m |
Package
Basic Version
- Pixhawk 2.4.8 Flight Controller ×1
- M8N GPS ×1
- Ledi MINI PIX Power Module ×1
- CUAV WiFi Telemetry ×1
- 30A ESC ×4
- 5045 Propeller ×4
- CQ230 Frame ×1
- A400 Balance Charger ×1
- 4S 2300mAh Battery ×1
- 2205 Motor ×4
- FS-i6 Remote Controller ×1
- BB Alarm Buzzer ×1
- MF-01 Optical Flow Module ×1
Visual Version
- Pixhawk 2.4.8 Flight Controller ×1
- M8N GPS ×1
- Ledi MINI PIX Power Module ×1
- CS Camera ×1
- 30A ESC ×4
- 5045 Propeller ×4
- CQ230 Frame ×1
- BB Alarm Buzzer ×1
- MF-01 Optical Flow Module ×1
- A400 Balance Charger ×1
- 4S 2300mAh Battery ×1
- 2205 Motor ×4
- FS-i6 Remote Controller ×1
- Raspi 4B-4G Onboard Computer ×1 Set
- T265 Visual Camera ×1
Applications
- Delivery: Transport lightweight items efficiently.
- Educational Development: Ideal for students and researchers to explore drone systems.
- Visual Processing: Use OpenCV for advanced video streaming and analysis.
- Navigation Experiments: Experiment with autonomous GPS-based flight and position tracking.
Additional Notes
- The system includes Ubuntu 20.04 for an enhanced programming interface.
- Ardupilot's robust ecosystem ensures scalability and versatility in drone applications.
- A complete learning kit with tutorials provided for beginners and professionals.
Details
CQ230 Open-Source Drone System

Pixhawk: Drone Hardware System
Utilizes the Pixhawk 2.4.8 controller, equipped with the new standard 32-bit processor STM32F427 and paired with the 5611 barometer. It is a cost-effective open-source controller with rich interface options.

ArduPilot: Drone Software System
The drone's software system—essentially the control firmware—uses the widely adopted open-source project ArduPilot.
(ArduPilot provides an advanced, fully-featured, and reliable open-source autopilot software system.)
It can control all imaginable drone systems. For those who love technology, drones, and exploring, understanding ArduPilot will introduce you to a fascinating and engaging world.

ArduPilot has been installed in over 1,000,000 drone systems worldwide. Equipped with advanced data logging, analysis, and simulation tools, it is a thoroughly tested and reliable autopilot system.

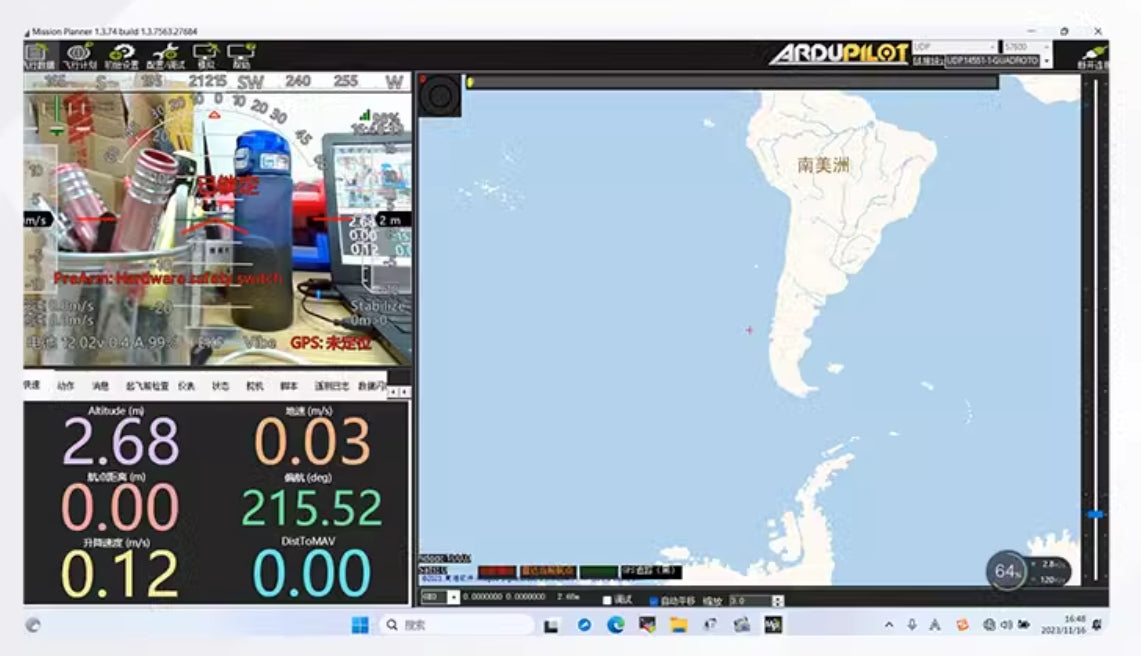
Mission Planner Ground Control Station
Features:
- Drone tuning and parameter setup tools;
- Set flight paths on maps, enabling drones to follow preset routes automatically;
- Select mission commands from dropdown menus to control the drone;
- Download and analyze logs;
- Perform simulations using SITL (Software In The Loop) system;
- More features await your discovery, and the possibilities don’t end here...


| Predefined Features | Basic Version | Visual Version |
|---|
| Line Drawing | ✓ | ✓ |
| Altitude Hold, Hover, Stabilization | ✓ | ✓ |
| Return Home, Fail-Safe Return | ✓ | ✓ |
| Landing, Low Battery Landing | ✓ | ✓ |
| Outdoor GPS Positioning and Route Flight | ✓ | ✓ |
| Dronekit-Python Programmable Control | ✓ | ✓ |
| WiFi Telemetry for Real-Time Data Transmission (Approx. 5m Range) | ✗ | ✓ |
| Indoor Optical Flow Positioning, Laser Altitude Fixing | ✓ | ✓ |
| Indoor Dual Visual Positioning Navigation, MP Anchor Points, Route Flight, Precise Landing with QR Code Recognition | ✗ | ✓ |
Suitable for Indoor Flying
Compact design with dimensions of 360mm × 360mm × 300mm, ideal for small-space operations.

Carbon fiber frame, strong and resistant to falling

The anti-collision ring design effectively protects the motor and propeller blades to ensure flight safety;

Enhanced Expandability for Multi-Scenario Functional Development
Based on the basic model, the system adds Raspberry Pi 4B and has integrated the Raspberry Pi system. This system includes:
- Ubuntu 20.04 (open-source operating system with graphical interface)
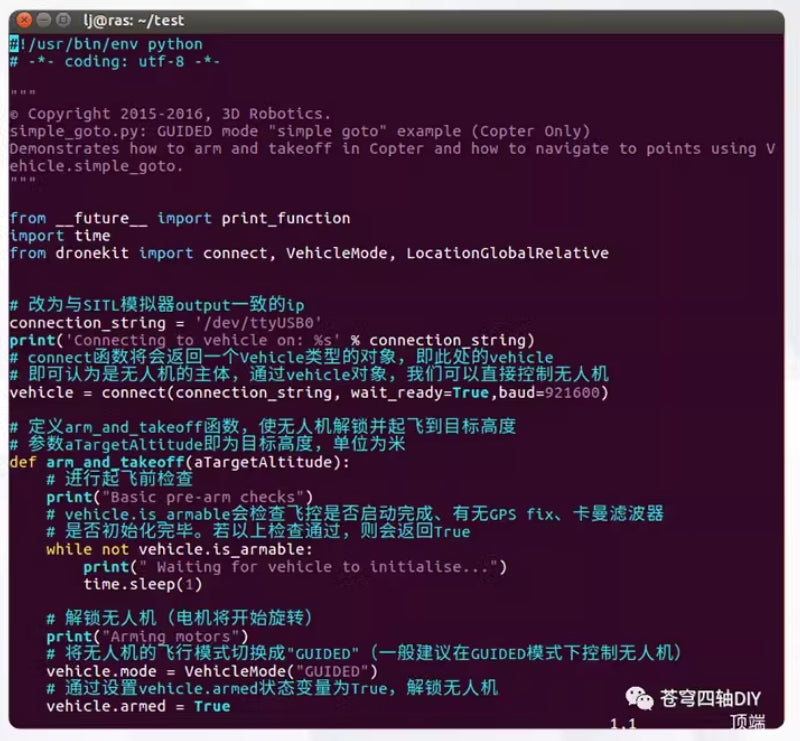
- Dronekit-Python (a Python library for programming drone control using Dronekit)
- Pymavlink (a Python implementation of the MAVLink protocol, enabling programmable drone control using Pymavlink)
- ROS (Robot Operating System)
- Mavros (a communication protocol for controlling drones via ROS)
- Gstreamer (low-latency video streaming transmission)
- Mavlink-router (distributes flight controller MAVLink data to different endpoints)
- OpenCV (open-source software library for computer vision processing)

Based on the above system, the drone can achieve:
- Programmable drone control using Dronekit-Python
2. OPEN CV Visual Processing
Added a CSI camera, enabling image transmission and post-processing:
- Visual streams can be captured using Raspberry Pi and processed with tools like OpenCV.
- Real-time HD video streams can also be transmitted back to a PC for processing or sent to a mobile device for review.

3. Real-Time HD Video Transmission
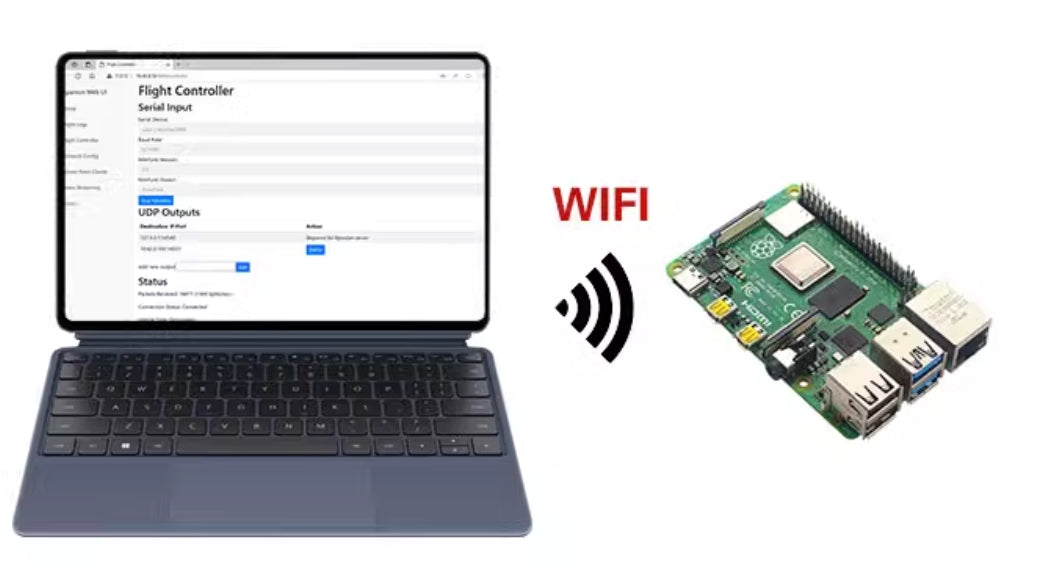
4. Ground Station Data Monitoring
Communication and image transmission between the WiFi network and the PC ground station (MP) can be achieved without requiring additional transmission modules. After the PC connects to the WiFi hotspot of the 4B, data and image transmission can be initiated by accessing 10.42.0.10:3000 via a web browser.
5. Developing Additional Features and Algorithm Verification Based on the Above Open-Source System
Visual Version Supporting Tutorials:
In addition to the basic version tutorials, introductory tutorials for Raspberry Pi visual processing are also provided.
Related Collections









