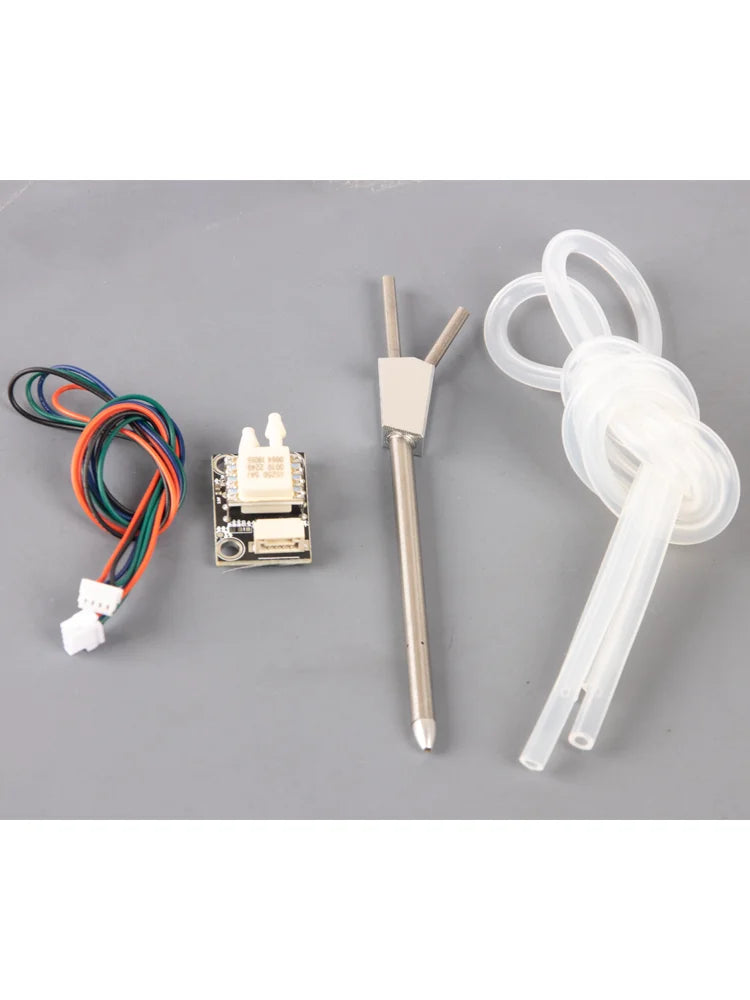
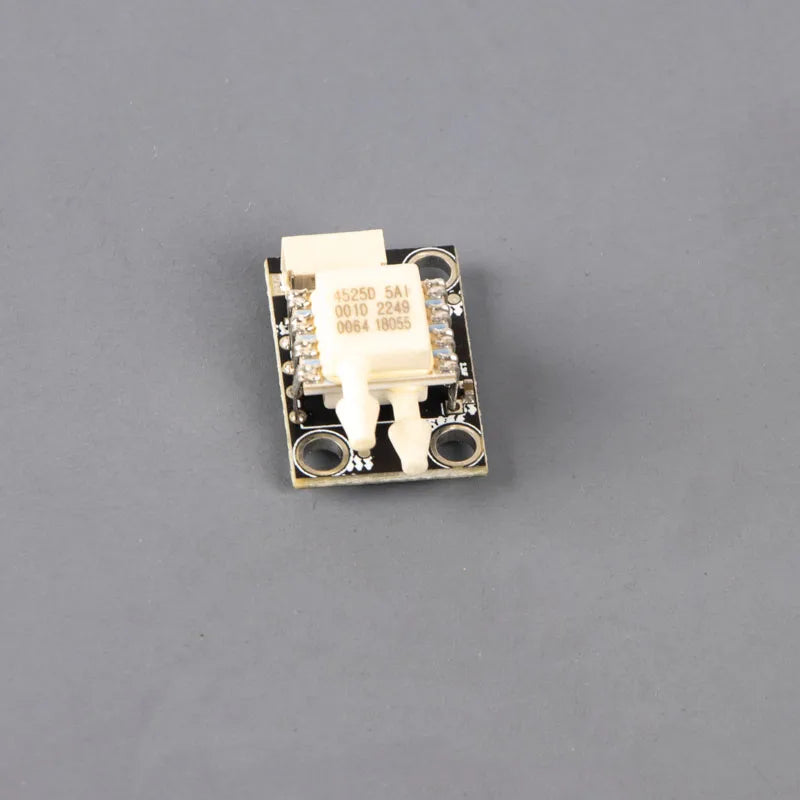
Ardupilot Arduplane Pitot Digital Air Speed Meter/Airspeed Meter Sensor Tube for HEX PIXHAWK2/CUAV V5 Pixhawk PX4 Flight Control
Ardupilot Arduplane Pitot Digital Air Speed Meter/Airspeed Meter Sensor Tube for HEX PIXHAWK2/CUAV V5 Pixhawk PX4 Flight Control
RCDrone
Regular price
$52.81 USD
Regular price
Sale price
$52.81 USD
Unit price
per
Taxes included.
Shipping calculated at checkout.
Couldn't load pickup availability
SPECIFICATIONS
Brand Name: FLYROUN
Origin: Mainland China
Material: Composite Material
Recommend Age: 12+y
RC Parts & Accs: Motor Components
For Vehicle Type: Airplanes
Use: Vehicles & Remote Control Toys
Upgrade Parts/Accessories: Car Shell
Remote Control Peripherals/Devices: Remote Controller
Tool Supplies: Battery
Technical parameters: Value 2
Model Number: Crius Power Module
Four-wheel Drive Attributes: tires







Related Collections