MATEK M10-L4-3100 GPS Module - Mateksys AP_PERIPH GNSS u-blox MAX-M10S RM3100
MATEK M10-L4-3100 GPS Module - Mateksys AP_PERIPH GNSS u-blox MAX-M10S RM3100
MATEKSYS
Couldn't load pickup availability
MATEK M10-L4-3100 - Mateksys AP_PERIPH GNSS SPECIFICATIONS
Use: Vehicles & Remote Control Toys
Recommend Age: 12+y,14+y,6-12y
Origin: Mainland China
Material: Composite Material
Brand Name: MATEKSYS
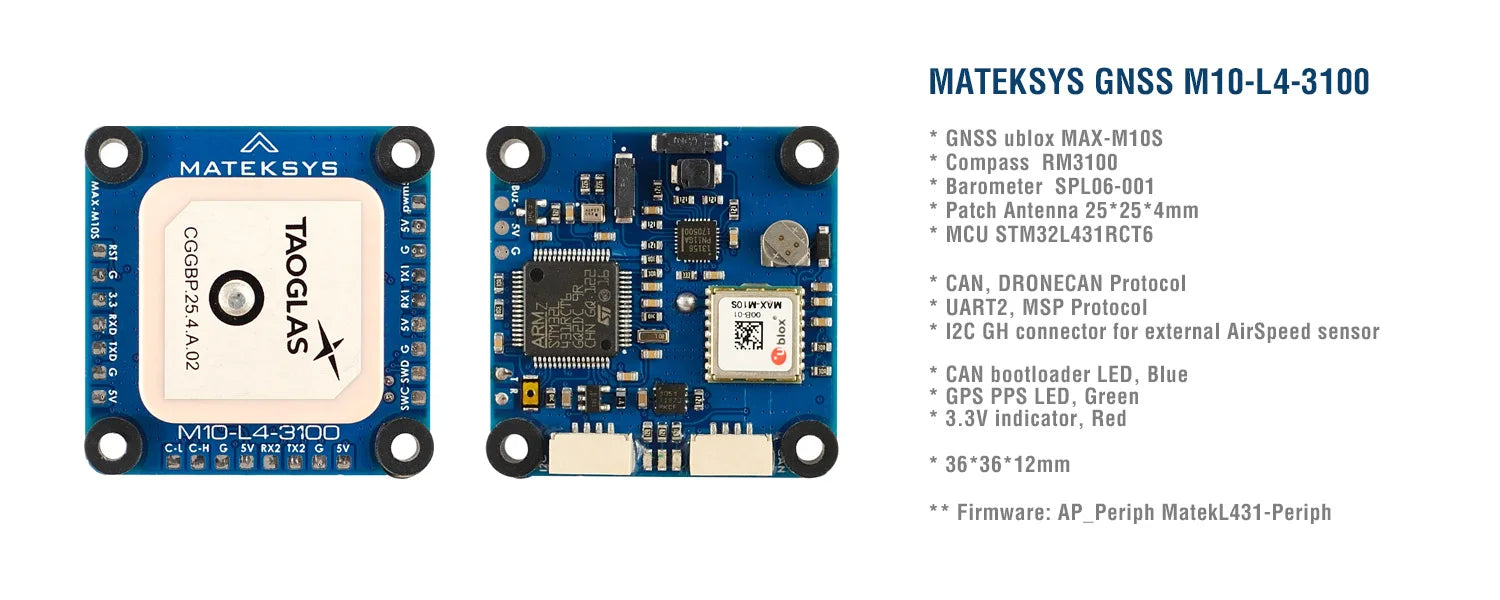
AP_PERIPH GNSS M10-L4-3100
AP_Periph L431 CAN node, MAX-M10S, RM3100, SPL06-001, DroneCAN protocol & UART_MSP
-
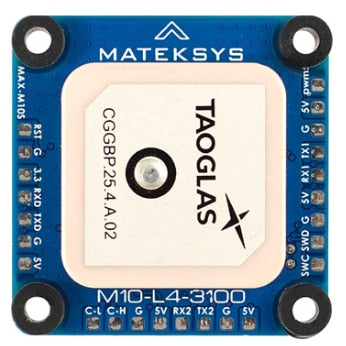
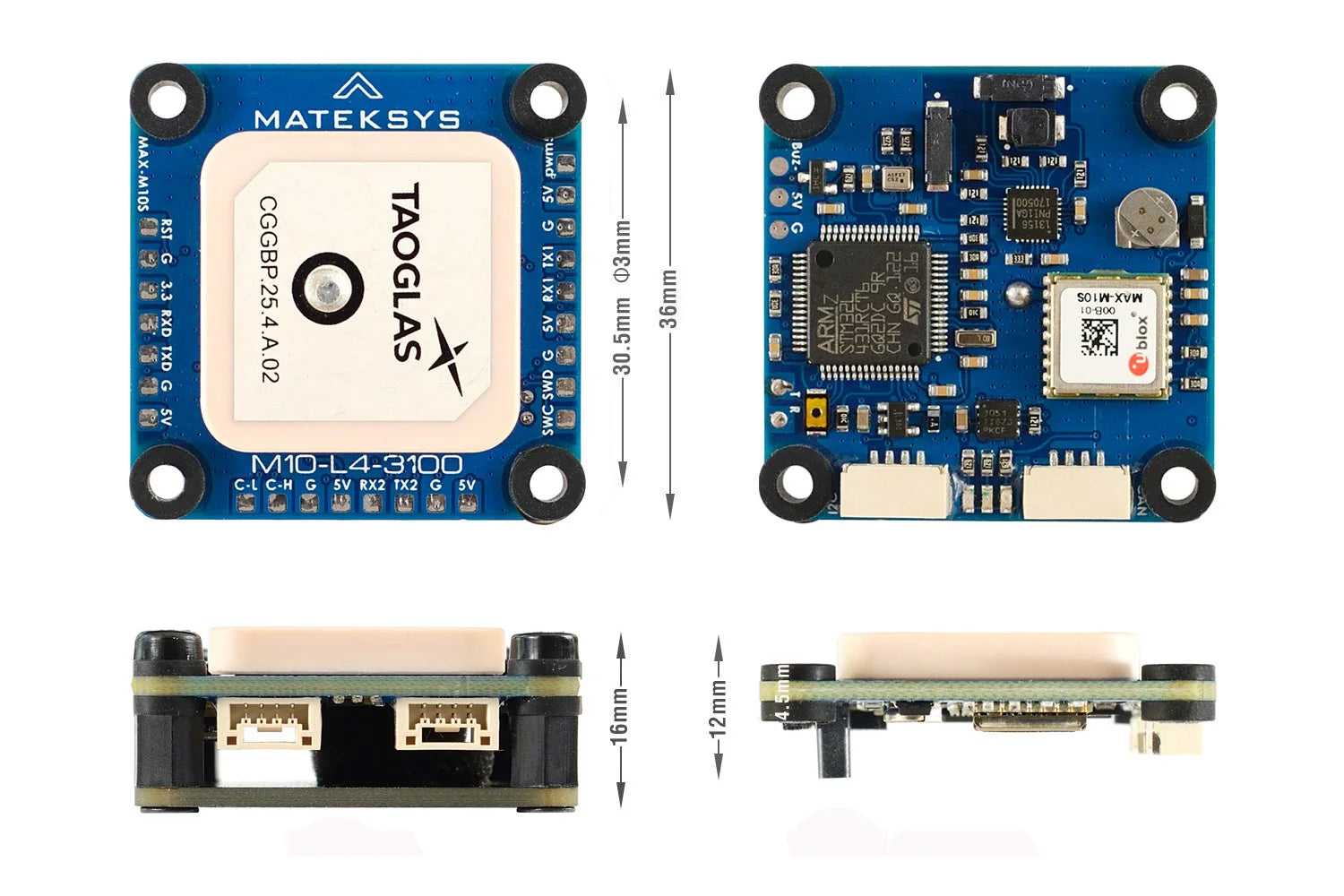
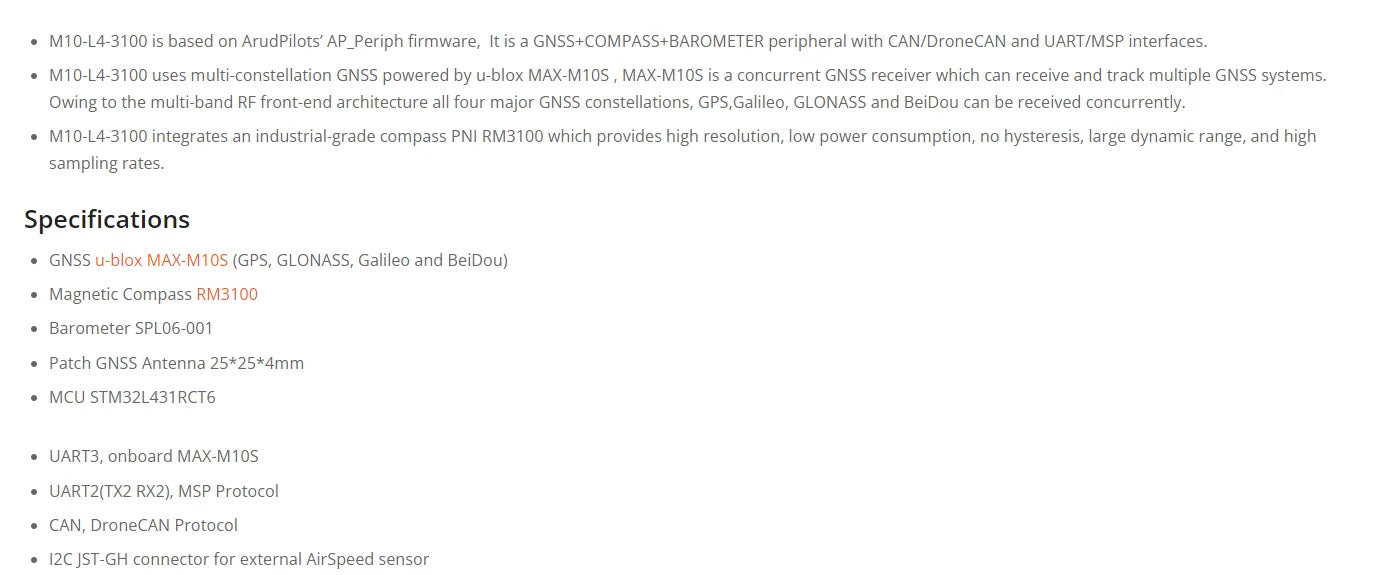
M10-L4-3100 is based on ArudPilots’ AP_Periph firmware, It is a GNSS+COMPASS+BAROMETER peripheral with CAN/DroneCAN and UART/MSP interfaces.
-
M10-L4-3100 uses multi-constellation GNSS powered by u-blox MAX-M10S , MAX-M10S is a concurrent GNSS receiver which can receive and track multiple GNSS systems. Owing to the multi-band RF front-end architecture all four major GNSS constellations, GPS,Galileo, GLONASS and BeiDou can be received concurrently.
-
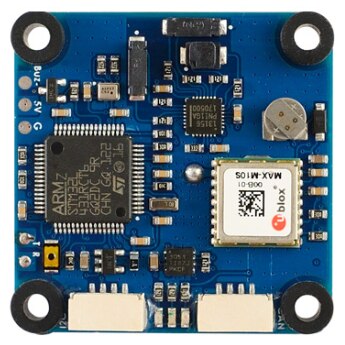
M10-L4-3100 integrates an industrial-grade compass PNI RM3100 which provides high resolution, low power consumption, no hysteresis, large dynamic range, and high sampling rates.

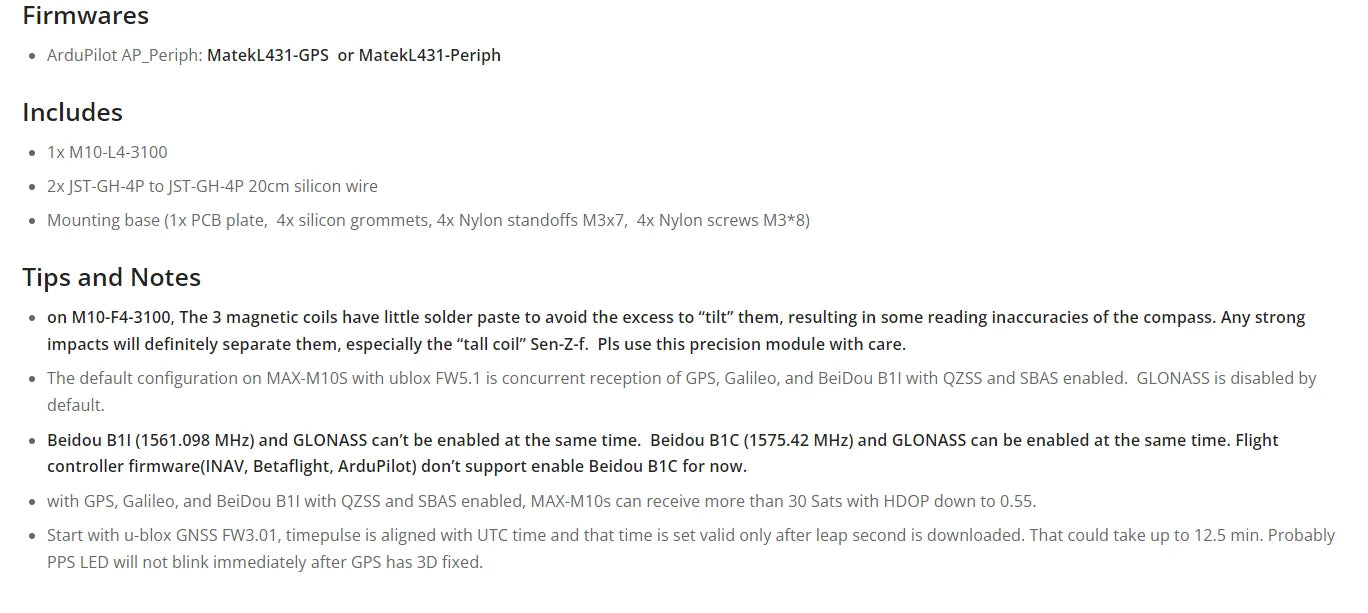
the default configuration on MAX-M1OS with ublox FWS . is concurrent reception of GPS, Galileo, and BeiDou BI with QZSS and SBAS enabled . GLONASS is disabled by default Beidou B1I (1575.42 MHz) and cant be enabled at the same time .
CAN (UAVCAN protocol) Connection
-
M10-L4-3100 5V — FC 4.5V ~ 5.3V
-
M10-L4-3100 CAN-H — FC CAN High
-
M10-L4-3100 CAN-L — FC CAN Low
-
M10-L4-3100 G — FC G/GND
FC UAVCAN Parameters(ArduPilot)
-
CAN_D1_PROTOCOL -> 1
-
CAN_P1_DRIVER -> 1
-
GPS_TYPE -> 9 (DroneCAN)
-
COMPASS_TYPEMASK -> 0 (make sure DroneCAN Unchecked)
————————————————————————–
If you connect I2C airspeed sensor to I2C port of M10-L4-3100
-
ARSPD_TYPE -> 8 (UAVCAN)
-
ARSPD_USE -> 1
And you must set CAN Node parameters for airspeed sensor connected to I2C port of M10-L4-3100
Mission Planner > Initial Setup > Optional Hardware > UAVCAN > SLCan Mode CAN1 > Parameters
-
MS4525 ARSP_TYPE -> 1 (default in hwdef)
-
MS5525 ARSP_TYPE -> 3 supports MS5525 with address 0x77 only
-
SDP3X ARSP_TYPE -> 6
-
DLVR-L10D ARSP_TYPE -> 9
-
Write and reboot
————————————————————————–
If you connect 2812LED DIN to PWM5 pad
-
NTF_LED_TYPES -> (make sure DroneCAN is checked)
SLCan Mode CAN1 > Parameters
-
OUT5_FUNCTION 120
-
NTF_LED_TYPES 455
-
AP_Periph fw must be “MatekL431-Periph”, MSP feature is disabled in “MatekL431-GPS”
UART (MSP protocol) Connection
-
M10-L4-3100 5V — FC 4.0V ~ 5.3V
-
M10-L4-3100 TX2 — FC spare UART_RX
-
M10-L4-3100 RX2 — FC spare UART_TX (not essential)
-
M10-L4-3100 G — FC G/GND
ArduPilot (since 4.1.x) FC Parameters
-
Serialx_PROTOCOL = 32 (MSP) where x is the SERIAL port used for connection on autopilot.
-
Serialx_BAUD = 115 where x is the SERIAL port used for connection on autopilot.
-
GPS TYPE = 19 (MSP)
-
BARO_PROBE_EXT = 4096 (MSP Baro)
-
BARO_PRIMARY = 1 (If you want to use MSP baro as primary baro, otherwise leave as default)
-
COMPASS_TYPEMASK 0 (or make sure MSP bit is not checked)
INAV (since 2.6) FC Parameters
-
M10-L4-3100 is compatible with any flight controller supported by INAV over a spare UART.
-
In ports tab, Enable MSP on corresponding UART that M10-L4-3100 connected, DO NOT enable “GPS” on that UART. select Baudrate 115200.
-
feature GPS
-
set gps_provider = MSP
-
set mag_hardware = MSP
-
set baro_hardware = MSP
-
set align_mag = CW90, if compass is mounted flat with arrow facing forward, and flight controller arrow is facing forward also.
Related Collections