







P600 Drone Scientific Research Drone - ROS AI Experimental Secondary Programming Industrial Development Platform Studio Lab Drone DIY Kit
P600 Drone Scientific Research Drone - ROS AI Experimental Secondary Programming Industrial Development Platform Studio Lab Drone DIY Kit
RCDrone
Couldn't load pickup availability
Overview
The P600 Scientific Research Drone is a cutting-edge platform designed for scientific research, industrial development, and AI experimentation. Equipped with a high-performance NVIDIA Jetson Orin NX computing module, it delivers 100 TOPS computing power, making it ideal for advanced AI applications. This drone features a 40x optical zoom gimbal camera for high-resolution imaging, 3D LiDAR SLAM for precise mapping, and RTK positioning for centimeter-level accuracy. Its integrated Prometheus V2 software and SpireCV vision library support secondary programming, making it a versatile tool for developers. With a flight time of up to 21 minutes, a 600 mm diagonal axis, and a robust 4.05 kg takeoff weight, the P600 is optimized for dynamic research and development environments.
Specifications
Aircraft
| Attribute | Details |
|---|---|
| Aircraft Type | Quadcopter |
| Takeoff Weight | Approx. 4.05 kg (including battery) |
| Diagonal Axis Distance | 600 mm |
| Dimensions | Length 469 mm, Width 469 mm, Height 400 mm |
| Maximum Hover Time | Approx. 21 min |
| Hovering Accuracy | RTK: ±0.015 m (horizontal), ±0.01 m (vertical) 3D LiDAR SLAM: ±0.2 m (horizontal), ±0.1 m (vertical) |
| Operating Temperature | 6°C ~ 40°C |
| Main MCU Chip | STM32H743VIT6 / 216 MHz / 2M program storage / 512 KB data storage |
| IMU | ICM20689 |
| Barometer | BMP388 |
| MTD | AT24C64 |
| I/O Interfaces | Built-in PX4IO-V2, supports 8PWM interfaces, 1RC interface (supports SBus, PPM, DSM) External Interfaces: 3UART (GH1.25 6-pin), 1CAN (GH1.25 4-pin), Flight Control USB Interface (Type-C) |
Onboard Computer
| Attribute | Details |
|---|---|
| Name | Allspark-Orin NX Onboard Computer |
| Model | IA160_V1 |
| Weight | Approx. 188 g |
| Dimensions | 102.5 mm × 62.5 mm × 31 mm (including fan) |
| Processor | NVIDIA Jetson Orin NX |
| Memory | 16 GB LPDDR5 |
| Computing Power | 100 TOPS |
| GPU | Integrated 32 Tensor Cores of 1024-core NVIDIA Ampere architecture GPU |
| CPU | 8-core Arm® Cortex®-A78AE v8.2 64-bit CPU (2MB L2 + 4MB L3) |
| SSD | 128 GB (M.2 interface, expandable) |
| Ethernet | 100 Mbps x2 (1 dedicated Ethernet port, 1 exchangeable) |
| WiFi | 5G |
| Display | Micro HDMI (1920*1080P) |
| USB Ports | USB2.0: Type-A x1, Type-C x1 USB2.0: OTG x1 |
| Power Supply | 10~26V @ 3A |
Power Battery
| Attribute | Details |
|---|---|
| Model | LPB610HV |
| Capacity | 10000 mAh |
| Battery Weight | 1.2 kg |
| Operating Voltage | 22V~26.1V |
| Storage Voltage | 23.1V |
| Dimensions | Length 180 mm, Width 90 mm, Height 63 mm |
Remote Controller
| Attribute | Details |
|---|---|
| Model | H16 |
| Channels | 16 |
| Frequency | 2.400~2.483 GHz |
| Operating Voltage | 4.2V |
| Battery | 20000 mAh |
| Charging Port | Type-C 9V-2A |
| Weight | 1034 g |
| Dimensions | Length 272 mm, Width 183 mm, Height 94 mm |
Communication Link
| Attribute | Details |
|---|---|
| Model | R16 |
| Communication Distance | Approx. 600 meters, bandwidth 3.5 Mbps |
| Operating Voltage | 7.2V~72V |
| Interfaces | 2UART, 1Ethernet, 1HDMI, 1Type-C |
| Dimensions | Length 76 mm, Width 69 mm, Height 11 mm |
Gimbal Camera
| Attribute | Details |
|---|---|
| Model | GX40 |
| Gimbal Dimensions | Length 85.8 mm, Width 86 mm, Height 129.3 mm |
| GCU Dimensions | Length 45.4 mm, Width 40 mm, Height 13.5 mm |
| Gimbal Weight | 405 g |
| GCU Weight | 18.6 g |
| Operating Voltage | 14V~53V |
| Streaming Protocol | RTSP (default) |
| Encoding Format | H.264 / H.264H / H.264B / H.265 / MJPEG |
| Resolution | - 4K30fps - 1080P@30fps - SCGA (12801024)@30fps <br> - 1.3M (1280960)@30fps - 720P@30fps |
| Bitrate | [email protected], [email protected] |
Lens
| Attribute | Details |
|---|---|
| Type | Optical zoom lens |
| Focal Length | 4.8~48 mm |
| Aperture (F/N.O.) | f1.7~f3.2 |
| Diagonal FOV (D) | 67.2°~7.6° |
| Vertical FOV (V) | 36.1°~3.7° |
| Horizontal FOV (H) | 60.2°~6.6° |
| Optical Zoom Ratio | 10x |
Image Sensor
| Attribute | Details |
|---|---|
| Sensor Type | CMOS |
| Effective Pixels | 8.29M |
| Sensor Size | 1/2.8'' |
| Pixel Size | 1.45×1.45 (μm) |
| Electronic Shutter Speed | 1~1/30000s |
Illuminator
| Attribute | Details |
|---|---|
| Type | Laser |
| Wavelength | 850±10 nm |
| Power | 0.8W |
| Illumination Distance | ≤200 m |
RTK
| Attribute | Details |
|---|---|
| Model | M15-RTK |
| Weight | 90 g |
| Dimensions | Length 80 mm, Width 50 mm, Height 20 mm |
| Supported Satellite Types | BDS/GPS/GLONASS/QZSS |
| Power Supply | 9~36V (12V recommended) |
| Antenna Connector | SMA-F |
| Functional Ports | UARTx2, CANx1, USB2.0x1 |
Charger
| Attribute | Details |
|---|---|
| Model | C1-XR |
| AC Input Voltage | 100~240V |
| DC Input Voltage | 11~18V |
| Dimensions | Length 130 mm, Width 115 mm, Height 61 mm |
| Weight | 380 g |
| Charging Current | 0.1A~10A |
| Supported Battery Cells | 1~6 cells |
3D LiDAR
| Attribute | Details |
|---|---|
| Model | MID360 |
| Laser Wavelength | 905 nm |
| Detection Range | 40 m (at 105% reflectivity) |
| Field of View (FOV) | Horizontal: 360°, Vertical: -7°~52° |
| Minimum Range | 0.1 m |
| Point Cloud Rate | 10 Hz (typical) |
| Points per Second | 200,000 pts/s |
| Data Interface | 100 BASE-TX Ethernet |
| Data Synchronization | IEEE 1588-2008 (PTP v2), GPS |
| Internal IMU | ICM40609 |
| Power Supply | 7~27V |
| Dimensions | 65 mm (W) x 65 mm (D) x 60 mm (H) |
| Weight | 115 g |
| Operating Temperature | -20°C ~ 55°C |
Software Parameters
Onboard Computer
| Attribute | Details |
|---|---|
| Model | Jetson Orin NX |
| Operating System | Ubuntu 20.04 |
| Username | amov |
| Password | amov |
| L4T Version | 35.2.1 |
| Jetpack Version | 5.1 |
| CUDA Version | 11.4.315 |
| Realsense SDK | 2.50.0 |
| ROS Version | noetic |
| OpenCV Version | 4.7.0 |
| Realsense ROS | 2.3.2 |
Package List
| Name | Specification/Model | Quantity/Unit |
|---|---|---|
| P600 Main Aircraft | P600-Allpark2-RTK-GX40-S3 | 1 set |
| M15-RTK Ground Terminal | M15-RTK | 1 piece |
| GNSS Mushroom Antenna | Mushroom Antenna | 1 piece |
| GNSS Antenna Extension Cable | Antenna Extension Cable | 1 cable |
| H16 Remote Controller | H16 | 1 unit |
| 6S 10000mAh Power Battery | 6S 10000mAh | 1 set |
| 3S 4000mAh Lithium Battery | 3S 4000mAh | 1 set |
| Smart Balancing Charger | C1-XR | 1 unit |
| Network Cable | 1.5 m | 1 cable |
| Safety Rope | 50 m | 1 package |
| HDMI Bracket | / | 1 piece |
| HDMI Adapter Cable | / | 1 piece |
| Computer Configuration | / | 1 piece |
| 2D Dropping Plate | 35×35 cm | 1 piece |
| Aviation Case | 740×540×510 mm | 1 set |
| Accessory Cable Pack | / | 1 package |
| Certificate | / | 1 sheet |
| Function Test Checklist | / | 1 sheet |
Details
Prometheus 600 Scientific Research Drone Development Platform
The Prometheus 600 Scientific Research Drone Development Platform (referred to as P600) is the fourth-generation product in the P600 series. It deeply integrates two core technologies, Prometheus and SpireCV, and is equipped with a 40x optical zoom gimbal camera. This setup enables long-distance target detection and tracking, autonomous landing from high altitudes, and aerial cruise missions.
The system supports 3D LiDAR SLAM with Fast-lio, achieving high-precision 3D SLAM mapping. Additionally, it features the EGO-Swarm multi-agent collaboration algorithm, allowing applications in various scenarios such as indoor and outdoor 3D spatial reconstruction and obstacle avoidance during drone navigation.
These advanced capabilities are complemented by the Prometheus professional ground station, which provides real-time visual feedback, operation monitoring, and dynamic parameter adjustment, making it easier for developers to master and accelerate secondary development.

Three Version of P600 Drone

Flexible Control of the Optical-Electronic Gimbal
The GX40 gimbal camera supports multi-scenario control and integrates chain-based remote control to enable target searching during waypoint navigation. Using the SpireCV vision library, it facilitates the detection and tracking of targets, achieving real-time locking of the gimbal on the target.
- Night Illumination
- Target Detection and Tracking

Target Click and Tracking
Using the YOLOv5 detection algorithm and leveraging the COCO universal dataset, targets are detected and tracked. The Nanotrack tracking algorithm locks onto selected targets for tracking. Without changes in conditions, targets up to 30 meters away can be identified and tracked. Through 40x optical zoom and electronic zoom, long-distance target detection and tracking are achieved. During drone tracking, the Prometheus professional ground station allows for dynamic distance-based target tracking switches (default is 10 meters).
- Tracking at 30m
- Tracking at 20m
- Tracking at 10m

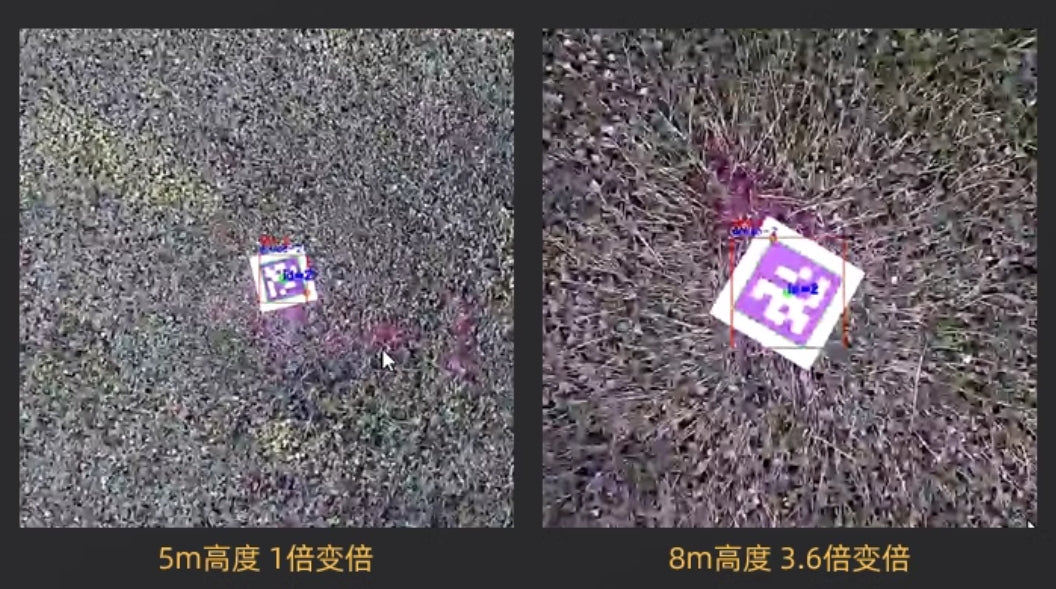
QR Code Guided Landing
Using the SpireCV vision library, precise detection and position estimation of QR codes are achieved. The GX40 can perform precision-guided landing on QR codes from different altitudes. The center of the gimbal camera aligns with the center of the QR code within a margin of error of 30 cm.
- 5m Altitude, 1x Zoom
- 8m Altitude, 3.6x Zoom
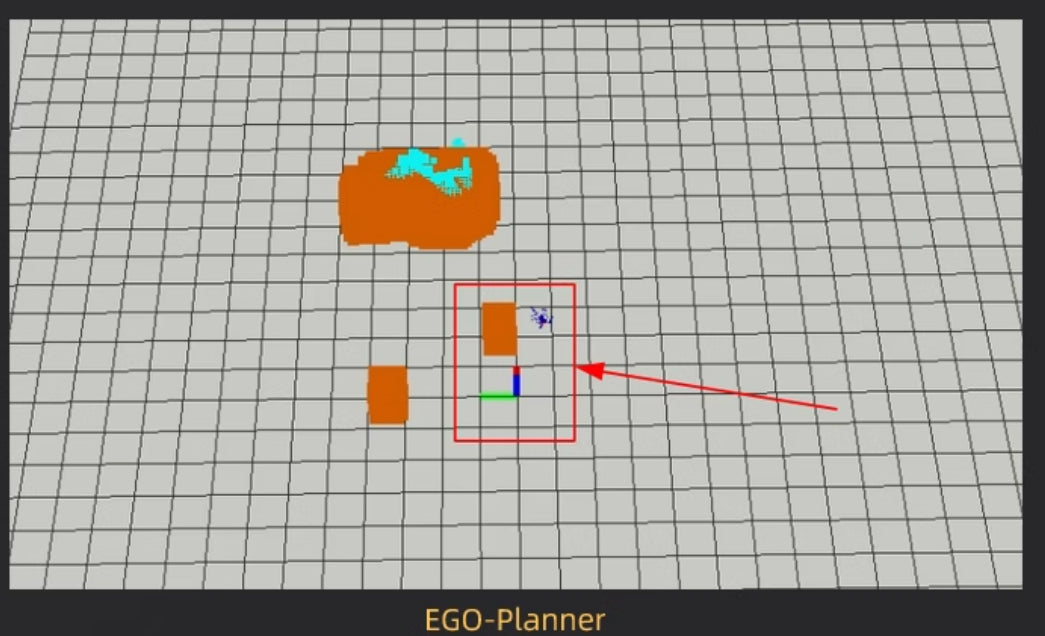
EGO-Planner
Supports the EGO-Planner path planning algorithm and provides Octomap mapping algorithm. Combined with the professional ground station, it enables autonomous 3D dynamic path planning.
Stable and Reliable Drone Control Applications
The P600 drone is equipped with high-precision RTK equipment, achieving high-accuracy hovering outdoors with horizontal precision up to 1 cm and vertical precision up to 1.5 cm. Combined with the Prometheus software system control module, it enables precise drone control.
The drone control module acts as a "bridge" between software programs and the drone, providing multiple control states such as initial position hovering, current position hovering, landing, and movement. These include six control modes: habitual system position, speed, integrated control of position and speed, and trajectory control mode. In total, it offers seven control modes.

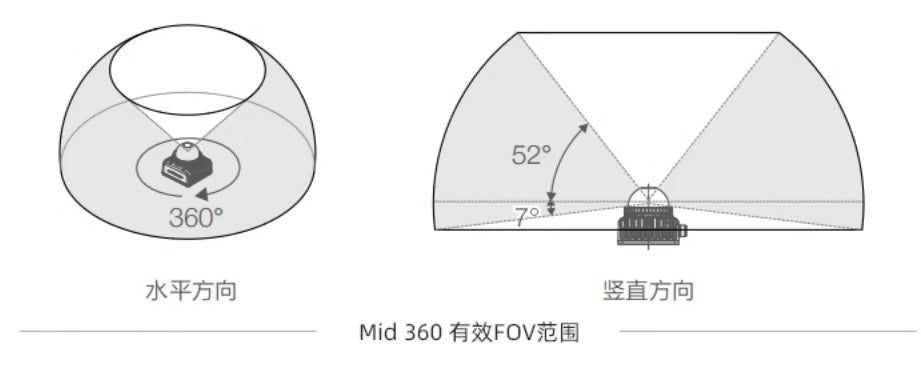
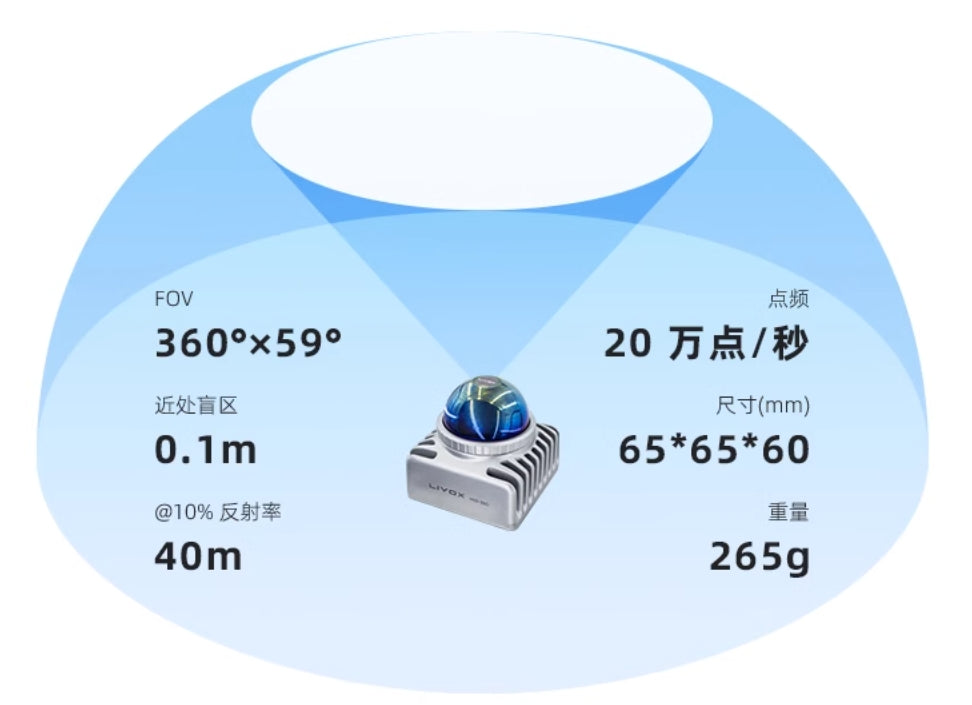
3D LiDAR Mid-360
- Low Blind Zone | Wide Field of View | Multi-Scenario Application
The Mid-360 features a 360° horizontal FOV and a maximum vertical FOV of 59°. When the target object's reflectivity is 10%, the maximum detection range can reach 40 meters, and the blind zone range is as small as 10 meters. It adapts to various complex environments such as low light and strong light.
Equipped with the Mid-360 module, the P600 drone achieves a panoramic coverage of the blind zone, ensuring seamless operation for drones across multi-scenario environments.
-
Diagram Descriptions:
- Horizontal Direction: 360°
- Vertical Direction: 52° maximum FOV

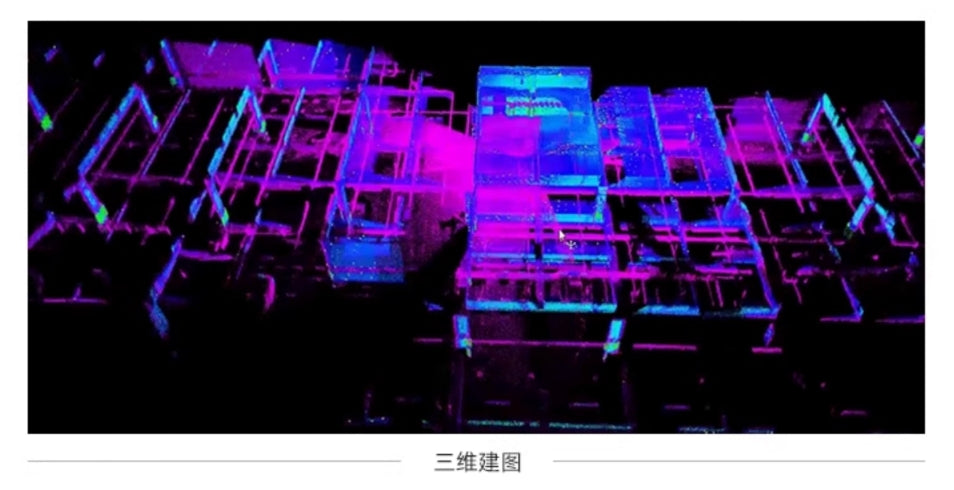
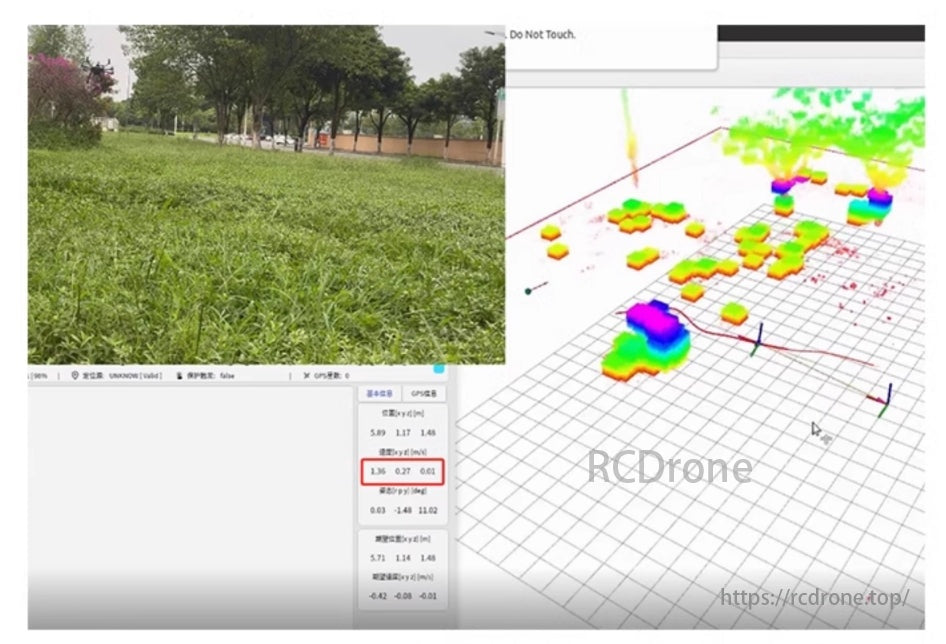
Quick and Accurate 3D Environmental Mapping
The P600 drone is equipped with advanced environmental sensing capabilities, allowing it to rapidly collect surrounding environmental data during flight. This data is processed in real-time to generate a 3D environmental map, providing precise spatial awareness and navigation support for various tasks.
EGO-Swarm Path Planning for Navigation and Obstacle Avoidance
The Mid360 publishes point cloud data and location data, combined with the EGO-Swarm path planning algorithm, significantly enhancing the drone's ability to autonomously adapt to dynamic environmental changes. It can analyze and respond in real-time to obstacles during movement and dynamically adjust the tracking target with a maximum speed of 2 m/s. This ensures exceptional flexibility and adaptability in unknown and complex operational scenarios.
This feature greatly improves the task efficiency of the drone, enabling it to efficiently and accurately complete a variety of tasks
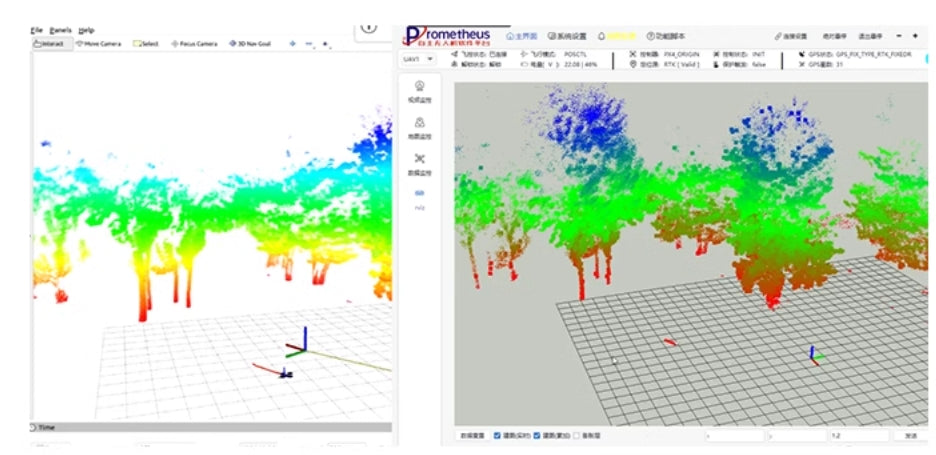
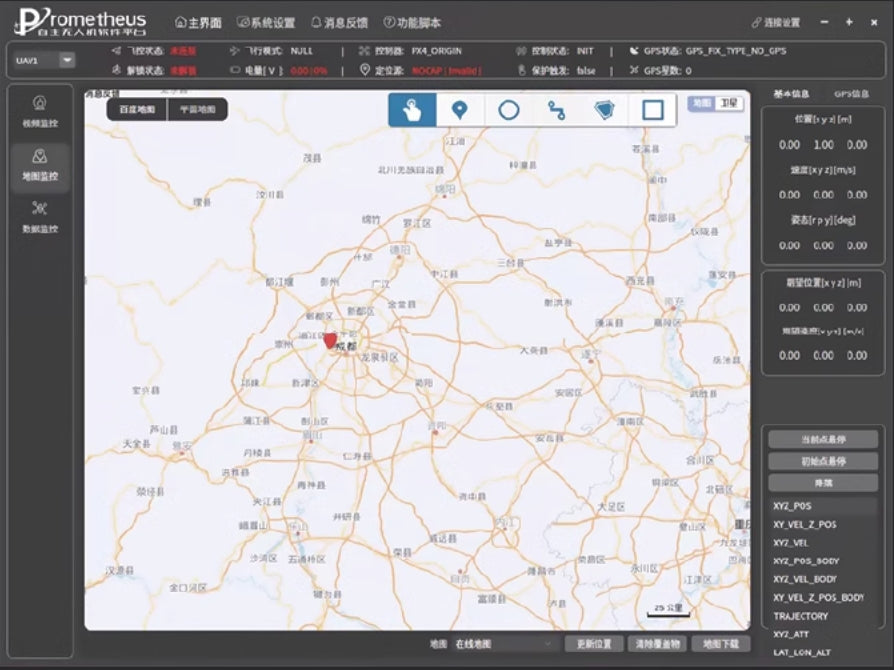
Prometheus Professional Ground Station Drone Interaction
- Ground Station Interaction
This showcases the interface and interaction capabilities of the Prometheus professional ground station, enabling seamless communication and operation with the drone through 3D environmental mapping.
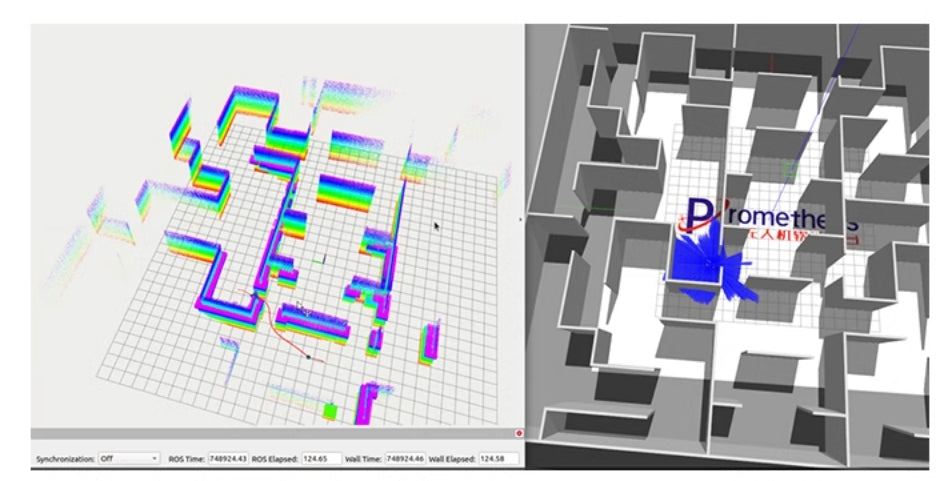
Integrated Simulation Function Demo
- Simulated 3D LiDAR SLAM and EGO-Swarm Path Planning
This illustrates the simulation of 3D LiDAR SLAM and EGO-Swarm path planning within a structured environment, showcasing the capabilities of the system in a controlled demo.
Hardware Features
Drone Frame
The Kedway DP1000 industrial-grade drone platform utilizes a FOC (Field-Oriented Control) power system, enabling the motor to rotate stably, with low noise, high efficiency, and rapid dynamic response. The entire drone system achieves a "ready-to-fly" state with excellent hardware quality, ensuring stable flight performance. It supports ultra-long endurance (70 minutes with no payload), while the P600 drone requires approximately 24 minutes for stabilization during positioning.

Powerful Computing Unit
- Allspark Micro Edge Computing Unit, equipped with the NVIDIA Orin NX module, providing 100 TOPS floating-point computing power.
- Compact size, lightweight, strong system compatibility, and GPU-accelerated high-performance computing.
- Pre-installed with all development environments, ready-to-use, enhancing secondary development efficiency.
- Dimensions: 102.5 mm × 62.5 mm × 31 mm

Integrated Image Transmission Controller
An industrial-grade drone remote controller combining data, image, and control in one.
- Frequency Band: 2.4-2.483 GHz
- Maximum Transmission Distance: 30 km
- Image Quality: 1080P
- Battery Life: 8-15 hours of continuous operation
During drone operation, users can monitor real-time drone information, view camera footage, and simultaneously control the drone with the joystick, ensuring fully visualized flight operation.

Dual-Antenna High-Precision RTK
The drone is equipped with an RTK-GNSS positioning module, which utilizes fast carrier-phase differential positioning technology and multipath suppression algorithms to provide centimeter-level positioning accuracy for drones. It can simultaneously receive RTCM data from multiple ground-based reference stations, supporting short, medium, and long baseline RTK calculations.
With a built-in multi-language Web GUI, it enables zero-threshold configuration and visualized data display and upgrade processes. The receiver also features a user-friendly webpage configuration interface, significantly lowering the operational barrier. It offers rich interfaces and is adaptable to various application scenarios, delivering exceptional performance in precise positioning.

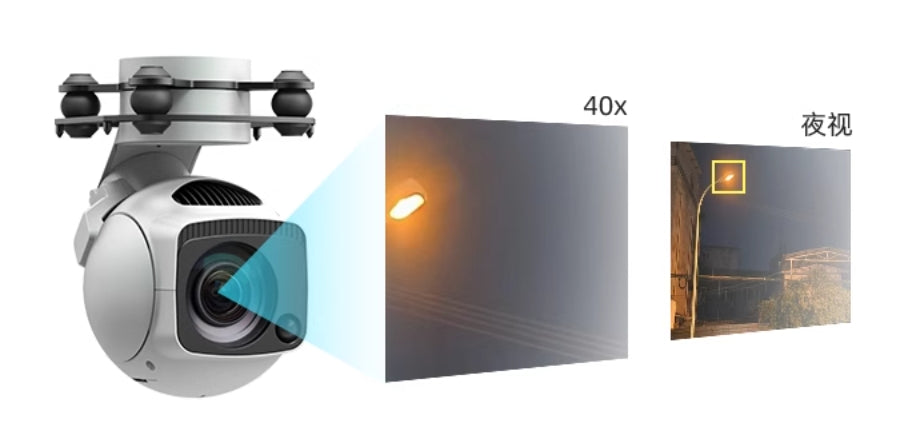
40x Optical-Electronic Gimbal
Equipped with a high-precision 3-axis non-orthogonal gimbal, it features an 8.29-megapixel 10x optical zoom camera combined with digital zoom technology, achieving up to 40x magnification. It can output 4K@30FPS video streams over the network. Additionally, it is equipped with a laser illumination module, enabling clear images even in completely dark environments.
MID 360 3D LiDAR
The Mid-360 is a cost-effective, safe, and reliable laser detection and ranging sensor. It is widely used in fields such as logistics robots, industrial robots, and smart cities, supporting functions like mapping, positioning, identification, and obstacle avoidance. The Mid-360 can detect objects as close as 0.1 meters and as far as 100 meters. It features compact size, wide field of view, high resolution, high reliability, and an integrated IMU.
Specifications:
- FOV: 360° × 59°
- Minimum Detection Distance: 0.1 m
- Range (@10% Reflectivity): 40 m
- Point Frequency: 200,000 points/second
- Dimensions (mm): 65 × 65 × 60
- Weight: 265 g
Software Features
Prometheus V2 Software System
The development platform is based on ROS and the Prometheus open-source framework, offering rich functionalities and a large number of secondary development interfaces for efficient customization. It provides interfaces for UAV state and sensor data, including location information, flight modes, battery status, and IMU. Additionally, it offers control interfaces for position, speed, acceleration, and attitude, as well as example programs for development interface usage. The UAV also includes built-in flight safety inspection functions (not obstacle avoidance), enabling automatic landing in abnormal situations to reduce crash risks, making development more secure.

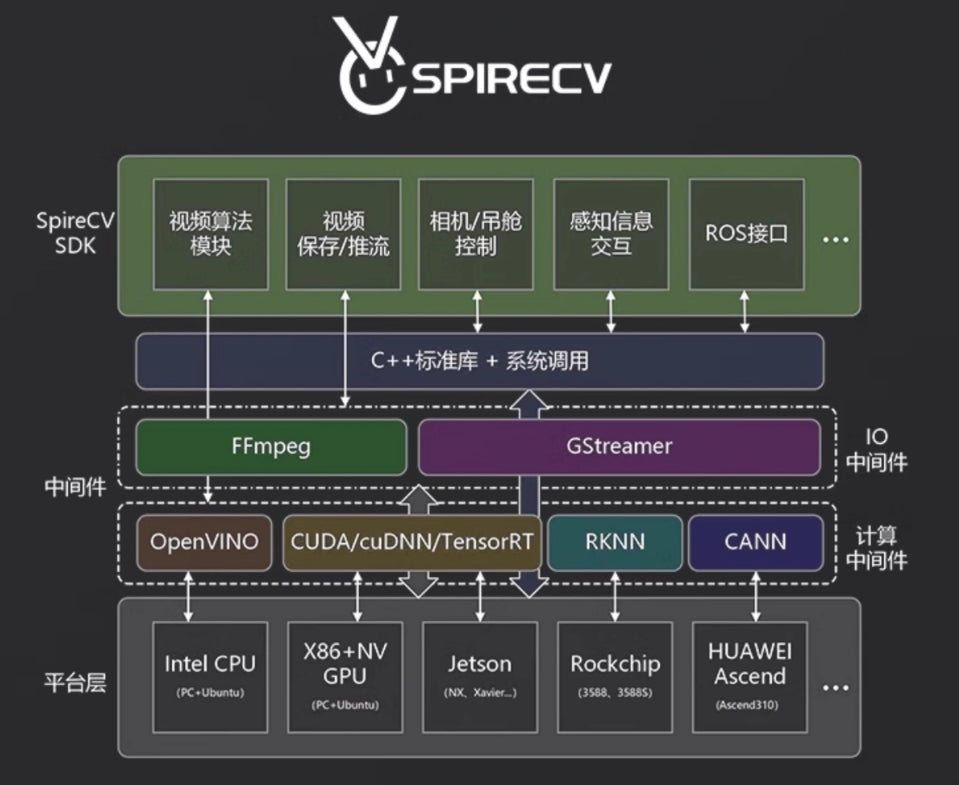
SpireCV Vision Library
Based on the SpireCV vision library, this is an onboard image real-time processing SDK designed specifically for intelligent unmanned systems. Its main features include gimbal/camera control, video storage, streaming, target detection, recognition, and tracking. It aims to provide developers of intelligent unmanned systems with high-performance, highly reliable, simple, and feature-rich vision processing capabilities. This model supports YOLO training for point-and-click vehicle tracking functionality.
Prometheus Ground Station System
The Prometheus ground station is a human-machine interface developed using Qt, based on the Prometheus system. It uses TCP/UDP communication to simplify the configuration of multi-machine communication. The ground station enables users to quickly replicate various functions of the Prometheus system, providing real-time monitoring of UAV status, as well as features like one-click takeoff, landing, and position control command operations.
Applications
-
Scientific Research and AI Development
- AI algorithm testing
- Advanced sensor data analysis
- Real-time image processing and tracking
-
Industrial Applications
- Precision mapping and navigation in complex environments
- Obstacle detection and avoidance in logistics and warehousing
- Inspection of infrastructure such as power lines and pipelines
-
Academic and Educational Uses
- Secondary programming for ROS-based AI research
- Laboratory demonstrations and experiments
- Training in autonomous drone navigation
-
Smart City Solutions
- 3D spatial reconstruction for urban planning
- Traffic monitoring and management
- Surveillance and environmental analysis
-
Custom Development
- Prototyping for specialized industrial applications
- Testing and integration of new hardware and software components
-
Disaster Response and Environmental Monitoring
- Aerial inspection and monitoring in disaster-stricken areas
- Environmental data collection for research and policy-making
The P600 provides unparalleled flexibility and functionality, enabling researchers, engineers, and developers to execute complex projects across diverse scenarios.
Related Collections







