STM32 Open Source Quadcopter DIY Kit - Laser Optical Flow Student Learning Board PCB + PID Parameter Debugging Rack
STM32 Open Source Quadcopter DIY Kit - Laser Optical Flow Student Learning Board PCB + PID Parameter Debugging Rack
RCDrone
Couldn't load pickup availability
Overview
The STM32 DIY Open Source Quadcopter Kit is a comprehensive solution for students, hobbyists, and developers who want hands-on experience in drone programming, flight dynamics, and hardware development. Featuring an STM32F103C8T6 microcontroller, MPU6050 6-axis gyroscope, and NRF24L01 wireless module, this quadcopter is equipped with cutting-edge technologies for smooth and stable flight. Its optical flow stabilization combined with barometric pressure sensors ensures precise altitude hold and position locking, while the open-source C firmware allows users to modify flight algorithms. With customizable IO ports, wireless PID parameter tuning, and support for secondary development using Keil MDK5, this quadcopter delivers unmatched versatility for both beginners and advanced users. A powerful 3.7V 1200mAh battery ensures up to 10 minutes of flight time, and the lightweight 320mm x 230mm frame is designed for stability and portability. The included PID debugging rack further enhances the learning experience, making this kit ideal for educational projects, competitions, and drone enthusiasts.
Key Features
-
Flight Control Precision:
- Equipped with STM32F103C8T6 microcontroller and MPU6050 gyroscope for reliable flight dynamics.
- Optical flow module (PMW3901) and barometric sensor (SPL06-001) enable precise position hold and altitude stabilization (20cm–400cm).
-
Open Source & Programmability:
- Fully open-source firmware written in standard C for easy secondary development.
- Compatible with Keil MDK5 environment for advanced programming projects.
-
Wireless Control:
- Features an NRF24L01 wireless module supporting a control distance of 50m+ in open environments.
- Wireless PID parameter adjustment for X, Y, Z axes simplifies flight optimization.
-
Robust Hardware Design:
- Durable frame with 8520 brushed motors and 13.5cm propellers for stable indoor and outdoor flights.
- Lightweight design (100g including battery) supports payloads up to 60g, making it suitable for adding sensors or cameras.
-
Enhanced Learning Tools:
- Includes a PID debugging rack for fine-tuning PID parameters.
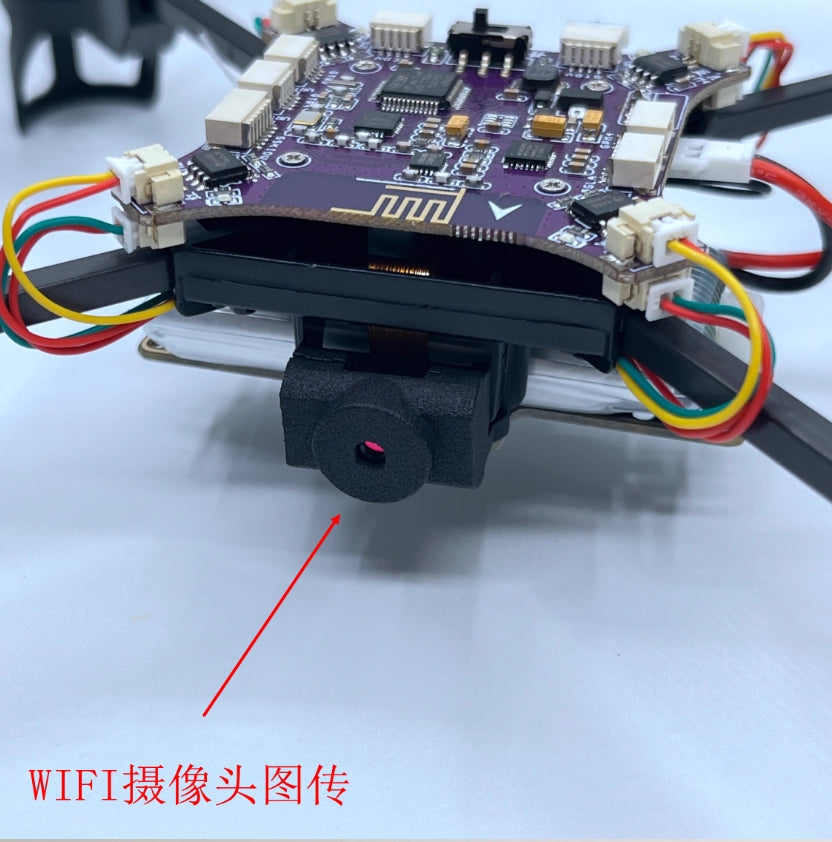
- Pre-soldered IO ports support extensions like Wi-Fi camera interfaces, SPI, UART, and IIC modules.
-
Powerful Battery System:
- Includes 3.7V 380mAh and 3.7V 1200mAh batteries, offering flight times of 5 to 10 minutes depending on payload and conditions.
- Built-in protection against overcharging and discharging ensures battery safety.
-
Plug-and-Play Connection:
- USB HID connection for real-time data transfer and parameter adjustments via computer interface.
- Easy-to-use SWD programming interface supporting both J-Link and ST-Link debuggers.
Technical Specifications
Quadcopter
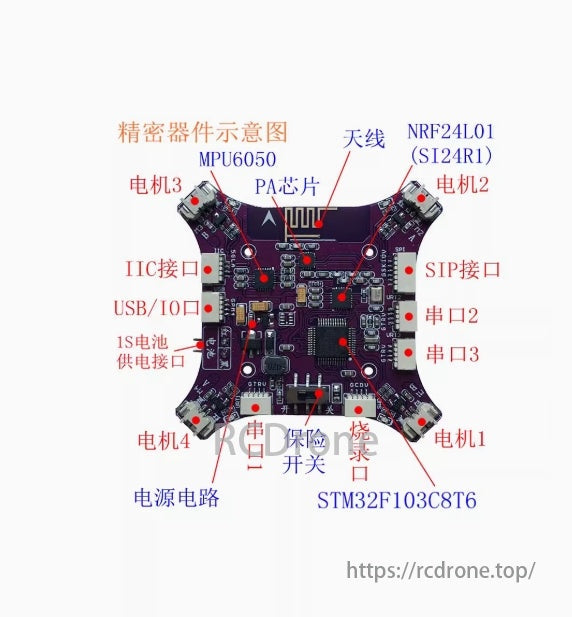
- Main Chip: STM32F103C8T6
- Gyroscope: MPU6050 (6-axis)
- Wireless Module: NRF24L01 (SI24R1)
- Motor Driver: AO3400 (A09T)
- Motors: 8520 brushed motors
- Propellers: 13.5cm (4 included)
- Sensors: SPL06-001 (barometer), PMW3901 (optical flow)
- Battery: 3.7V 1200mAh (10 mins flight) + 3.7V 380mAh (5 mins flight)
- Weight: 100g (including battery)
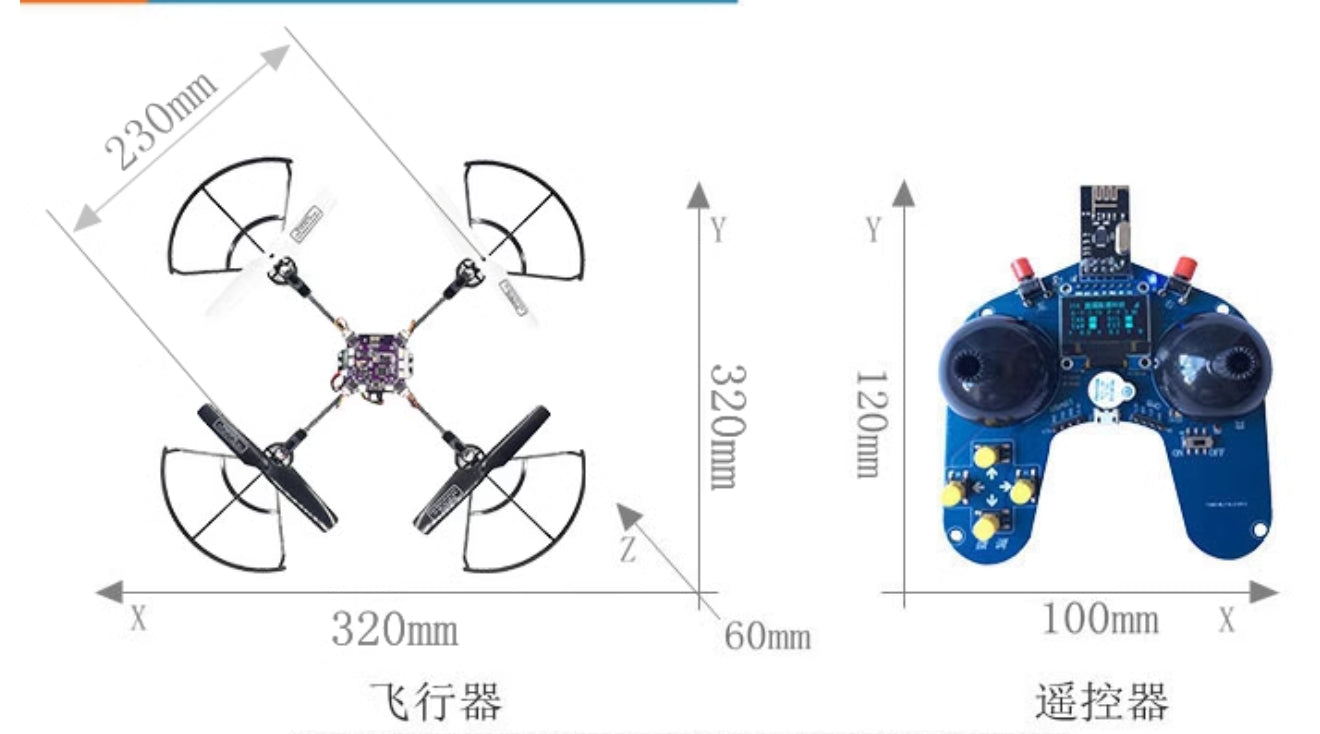
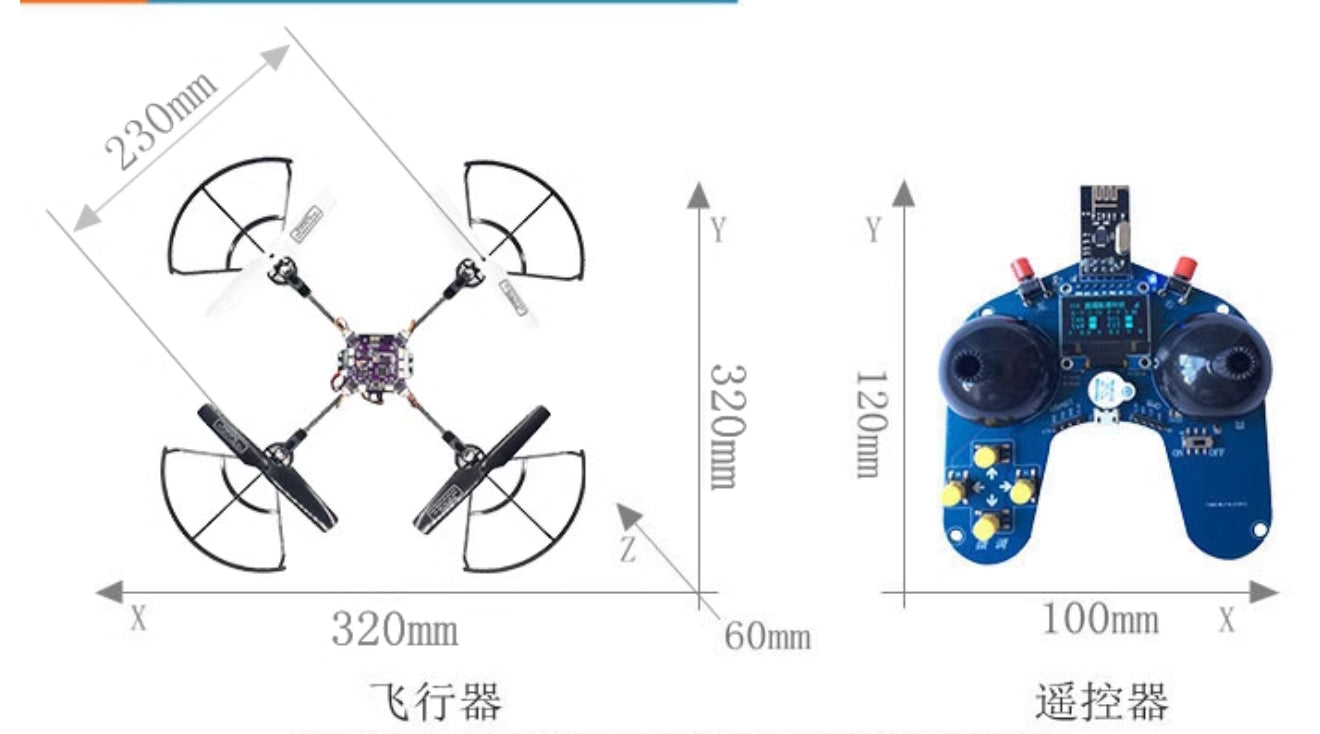
- Frame Size: 320mm x 230mm
- Additional Ports: SPI x1, UART x2, IIC x1, USB IO x1
- Payload Capacity: 60g
Remote Controller
- Main Chip: STM32F103C8T6
- Wireless Module: NRF24L01 (SI24R1)
- Display: 0.96-inch OLED
- Power: 3.7V 380mAh battery
- Control Distance: >50m (open field)
- Size: 12cm x 10cm
- Weight: 60g
- Additional Features: Calibration buttons, visualized PID tuning interface
Package Contents
- Quadcopter Frame with Pre-Assembled Electronics (STM32F103C8T6-based flight controller, MPU6050, SPL06-001, PMW3901).
- STM32 Wireless Remote Controller (with OLED display and NRF24L01 module).
-
Batteries:
- 3.7V 1200mAh Lithium Battery x1 (10-minute flight time)
- 3.7V 380mAh Lithium Battery x1 (5-minute flight time)
- Spare Propellers (4pcs)
- USB Charging Cable (3.7V–4.2V compatible)
- Jumper Wires (assorted)
- Precision Screwdriver
- PID Debugging Rack
- Comprehensive User Manual and Tutorials (PDF and video).
Additional Features Highlighted
- Precise Component Placement: Each soldered part is marked, including ports for power, SPI, IIC, USB, and motor connectors.
- Modular Debugging Tools: Optical flow and barometric sensor placement ensures precise flight data for PID adjustment.
- Development Board Extensions: Allows integration of cameras and sensors for aerial photography and video recording.
- Visualized Interface: Quadcopter data displayed in real-time via PC software for debugging and optimization.
Applications:
- Educational Use: Perfect for STEM learning projects and engineering courses.
- Competitions: Ideal for DIY drone challenges and robotics competitions.
- Hobbyists: Engaging project for tech enthusiasts and makers.
- Advanced Development: Supports secondary development for custom applications.
Safety Notice:
Ensure safe testing conditions by using the included debugging rack. Avoid flying in crowded or hazardous areas. Follow assembly instructions and handle soldered components with care.
With its modular design, open-source flexibility, and extensive learning resources, the STM32 DIY Open Source Quadcopter Kit is your gateway to mastering drone technology and programming.




This is a PCB board assembly for television systems with STM3ZF103C8T6F chip, designed for high-quality video transmission and reception.


OnF STM32F Blue Pill, 7% i: STM32 High Frequency BRB+, 10 Ohm x 7 HhJfV: STM32 Remote Control. Display: 0.96 Inch OLED IM Et: 2.4C IMHM: ~20°C to ~60°C JE+HFZ: >50x (Watt), EFt) 7ARh: 12cm x 6cm InLaR: 3.7V, 380mAh, Weight: 60g
Related Collections